矿用液压支架控制器设计
2019-02-21 08:04:56张志宏
煤矿机电 2019年1期
张志宏
(山煤集团煤业管理有限公司 晋东南分公司, 山西 长治 046600)
0 引言
液压支架是煤矿井下生产中的重要设备,用于控制液压支架动作的电控系统是其重要部件。通过液压支架电控系统的控制,既能实现液压支架各个动作的自动化操作,包括:单台支架的动作、单台支架按照指定的顺序联合动作、几个支架组成一个小组成组集体动作,还能通过预设的通信总线实现远程操控。液压支架控制器的使用不仅能提高矿井的生产效率,还能大量减少工作面工人的数量,提高矿井生产的可靠性和安全性。目前我国煤矿井下使用的液压支架电控系统主要依赖进口,虽然国内也有少许同类型产品,但是在稳定性和安全性方面都无法达到要求。进口产品的缺点是成本高、与国产设备兼容性差、维修周期长等[1]。因此,研发一套拥有自主知识产权的液压支架控制系统,对于降低矿井生产成本,实现无人化综采工作面以及矿井生产自动化的发展目标具有重要意义。
本文设计的一种液压支架控制器具有体积小、自动化程度高、功能齐全和稳定性好等优点,通过井下工业现场试验证明,该控制器完全符合实际生产需求。
1 液压支架电控系统整体架构
综采工作面液压支架数量众多,根据工作面长度,液压支架数量一般在100~200台左右。通过查阅资料和借鉴现场的工作经验可知,一般1台控制器控制3台液压支架比较合理,并要求相邻的液压支架控制器之间能互相控制。
图1所示为液压支架控制系统整体结构图,整个液压支架控制系统可分为3层。
1)最底层是液压支架控制器,其主要作用是收集并上传传感器的各种信号,控制液压支架上的各种阀门,实现液压支架动作。所有的液压支架控制器作为节点挂接在由端头控制器引出的两条CAN总线上,如果某个控制器发送故障,端头控制器会自动识别并报警。
2)处在中间层的是液压支架端头控制器,其主要功能是将最底层液压支架控制器收集到的传感器信号上传给地面的监控站,下发控制命令等。
3)最上层是地面监控室,可以在组态界面里看到液压支架各种实时的运行参数,还可以远程操控液压支架的动作。
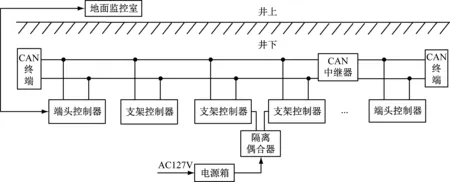
图1 液压支架控制系统整体结构图
整个系统的供电采用井下现有的AC127V电源,通过电源箱的整流滤波后,变为控制器能够使用的直流低电压电源[2]。
2 控制器硬件设计
2.1 液压支架控制器结构
图2所示为液压支架控制器硬件总体架构。
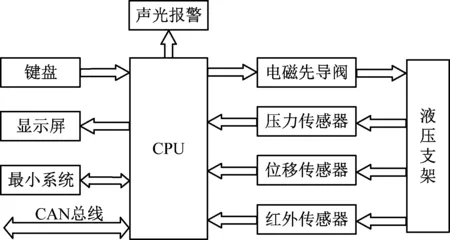
图2 液压支架控制器硬件架构图
整个液压支架控制器硬件由以下几个模块组成。
1)人际交互模块。包括键盘、显示屏。键盘用于参数的输入和界面控制,显示屏显示各种传感器实时数据以及液压支架动作状况。
2)声光报警模块。当有故障发生,提示工作人员故障位置和故障种类,便于及时关闭系统,避免造成更大的事故。
3)最小系统模块。主要包括时钟电路、电源、下载接口等。
4)通信模块。主要是CAN通信,具有传输速度快、传输距离远和抗干扰强等特点。
5)传感器模块。包括压力传感器、红外传感器、位移传感器等,压力传感器主要用来监控液压腔内的压力,位移传感器监测液压支架动作位移的大小,红外传感器主要用来监测采煤机的实时位置,便于分析液压支架下一步的动作[3]。
2.2 主控制器CPU选型
由于工作面空间有限而液压支架控制器使用数量多,故不便使用以PLC为主控制器的设计方案。本系统使用了以单片机为主控制器的硬件电路设计方案[4]。
STM32F103ZET6微控制器是意法半导体公司生产的基于ARM架构的一款32位处理器芯片,主频为72 MHz,供电电压为3.3 V。表1所示为CPU主要硬件资源。

表1 CPU内部主要硬件资源
2.3 CAN通信硬件电路
图3所示为CAN通信硬件电路图。该系统使用的TJA1050T型CAN收发芯片具有较高性能和集成度,该芯片在系统中的主要作用是通信协议的控制和物理总线接口,具有较强的差动收发能力,适合远距离信号的传输。由于井下环境比较复杂,各种干扰时有发生,为了保障CAN总线能够稳定地进行信号传输,系统加入了光电耦合模块来消除干扰,在模块两端采用不同的接地方式,能有效地防止共模信号的干扰。在信号的出口处加入了钳位电路,以防线路上突然的电压变压对芯片造成的损害。
C1和C2电容能有效地吸收通信线路上的高次谐波,保障通信的稳定性和准确性[5-6]。

图3 CAN通信硬件电路图
3 系统软件设计
3.1 单架单动作软件设计
图4所示为单台液压支架动作控制流程。设计中预设由1台液压支架控制器控制附近的3台液压支架。首先端头控制器选择要操控的液压支架号,选定以后程序进入主控模式。通过CAN总线将信号下发到相应的液压支架控制器。控制器接收到控制命令后,对命令进行翻译,即通过对比地址来确定具体的控制对象,控制对象确定后,进入相应的控制模式并开始执行动作,接收到停止命令后停止。随后将相应寄存器的值清0,以便为下一次的信号接收做好准备,如果没有接收到控制命令,液压支架控制器便一直处于空闲模式。

图4 单架单动作程序流程图
3.2 液压支架成组动作软件设计
成组动作由每一台液压支架顺序联动组成,同时需要考虑相邻液压支架之间位置的关系,要达到动作之间的相互配合。
图5所示为液压支架成组动作流程图。支架联动时,首先要确定动作起始和结束的支架号码,根据联动支架的数据计算出大概的动作时间。如果在规定时间内没有完成动作就要发出声光报警信息。成组联动时,每一个动作的执行可能会同时涉及多个液压支架,根据传感器的信息,时刻判断各个液压支架的实时位置,便于程序作出动作的调整。当进入主控模式后,按下成组动作按键,通过液压支架控制器之间的CAN通信总线来传递控制信息。动作结束后,程序会立即清除寄存器内的信息,便于接收下一次的控制命令。控制完成后自动进入到空闲模式。
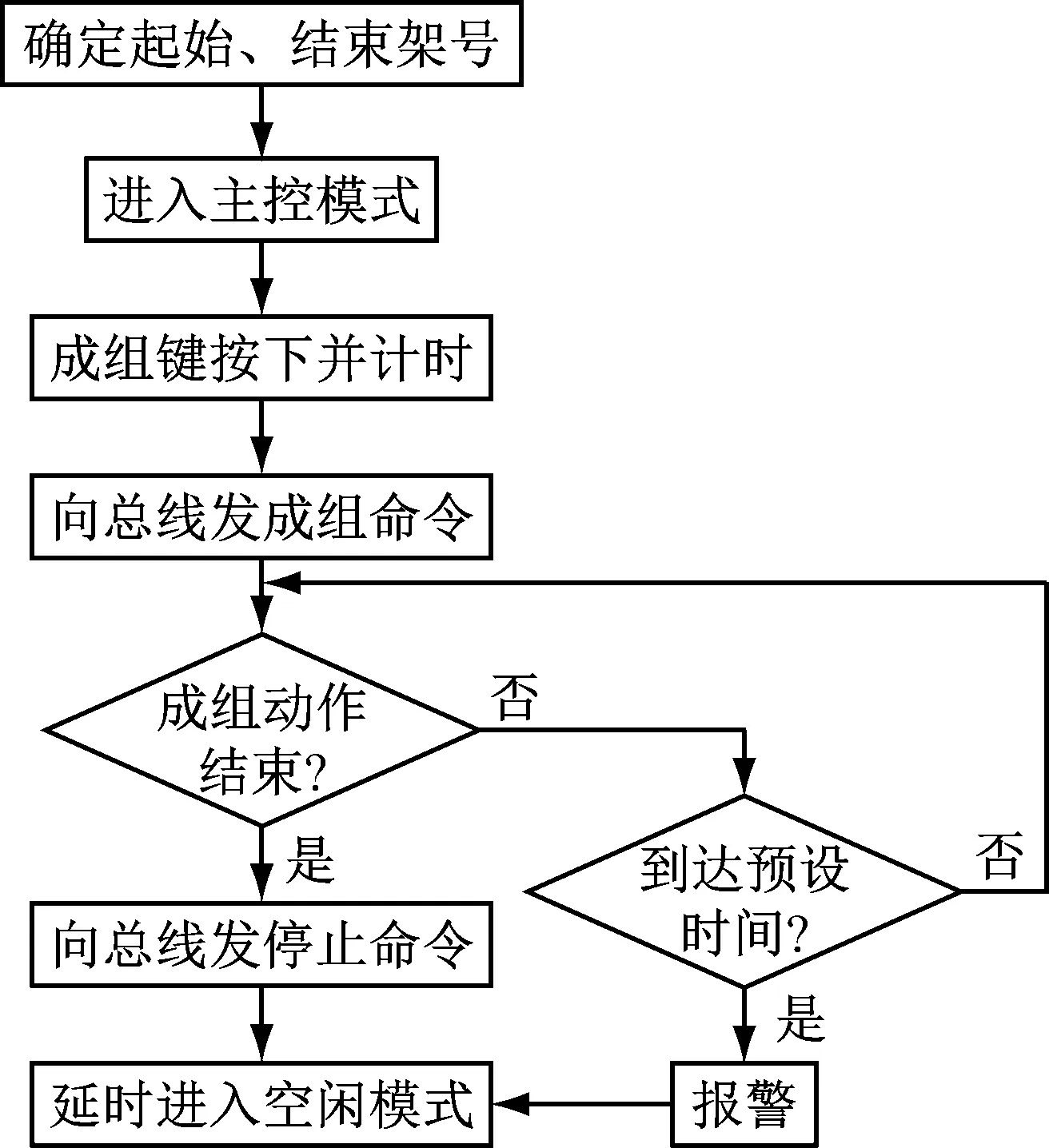
图5 液压支架控制器成组动作流程图
3.3 CAN通信程序设计
系统中CAN总线上传递的信息主要包括两种类型:控制命令的传递、液压支架实时数据的传递。控制命令包括控制器与控制器之间、端头控制器与液压支架控制器之间等;数据的传递包括传感器采集到的实时数据、液压支架动作的实时数据等。
图6所示为CAN通信总线节点初始化流程。首先设置相应的控制寄存器进入复位状态,然后通过时钟的分频计数器设置通信的速率,即波特率。接着设置总线定时寄存器,用于信号接收的时间计算。最后设置输入输出接口的控制寄存器,打开中断进入到正常的运行模式。
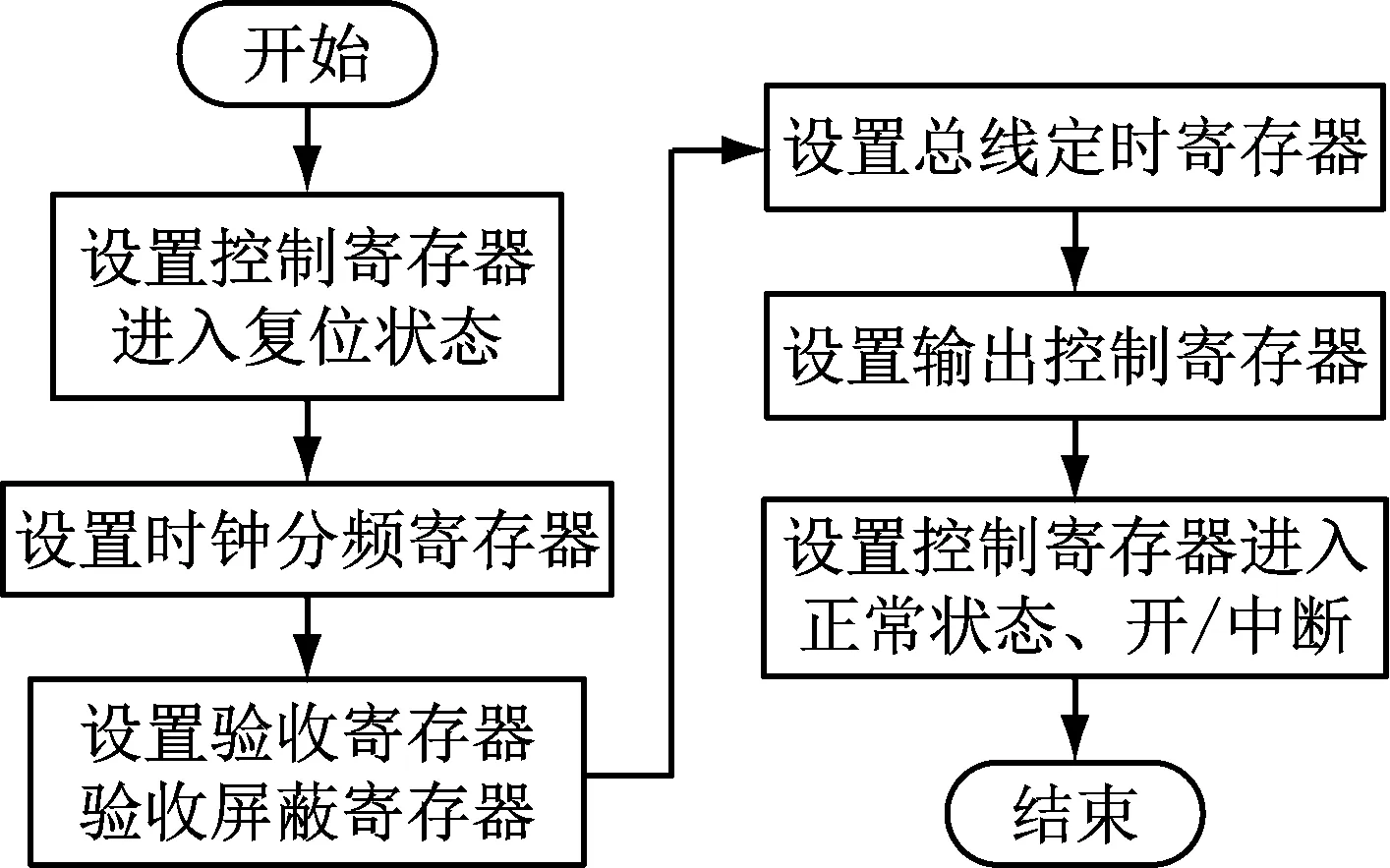
图6 CAN总线节点初始化流程图
4 结论
根据工业现场实际需求设计了一套液压支架控制器,通过井下工业现场试验表明,该设备运行稳定功能可靠,能够满足工业现场需求,为矿井下同类型的控制器设计提供了思路。
猜你喜欢
山东煤炭科技(2021年9期)2021-10-14 06:43:06
武汉交通职业学院学报(2021年3期)2021-09-23 08:55:22
工程建设与设计(2020年20期)2020-11-08 12:48:06
制造技术与机床(2019年11期)2019-12-04 05:50:12
测控技术(2018年6期)2018-11-25 09:50:12
测控技术(2018年8期)2018-11-25 07:42:08
制造业自动化(2017年2期)2017-03-20 14:26:16
华东师范大学学报(自然科学版)(2017年1期)2017-02-27 13:41:04
浙江大学学报(工学版)(2016年11期)2016-06-05 09:21:05
电子设计工程(2015年8期)2015-02-27 12:05:26