基于视觉对比显著性分析的红外目标算法研究
2019-02-13 06:05甘守飞
宿州学院学报 2019年12期
甘守飞
宿州学院信息工程学院,安徽宿州,234000
红外成像技术具有作用距离远、可全天候工作和抗干扰性好等优点,在军用和民用领域均得到了广泛的应用。从红外影像中自动检测出目标是众多应用中极其重要的一个,受到诸多学者的关注[1-4]。但红外影像受到成像距离远、背景复杂以及噪声干扰等因素的影响,图像的信噪比往往较低,因此从红外图像中检测出目标具有一定的难度,尤其当场景较为复杂、目标较多且图像噪声较大时,很容易造成目标较高的漏警和虚警。
目前的算法多集中于借助分割算法和滤波算法实现对目标的提取。在红外影像噪声较多的情况下,这种方式提取的结果往往是离散点并且具有较多的虚警目标。典型的提取算法一般为阈值分割算法,如OTSU、改进OTSU[1]以及基于图划分理论的阈值分割技术[2]。这些阈值分割技术一般采用一定的策略寻找阈值,将待分割区域分为目标区域和背景区域两大类。考虑到阈值的唯一性,这些方法往往是全局搜索方法,容易在复杂场景下造成错分,如由于探测器受环境影响导致目标在直方图上呈现双极性时,会使算法失效[3];另一方面在噪声干扰下,目前的分割算法容易造成虚警。
针对上述问题,本文借鉴计算机视觉中对比显著性分析的相关策略和思路,首先通过模糊C均值(Classical fuzzy C-means,FCM)[5-7]聚类对图像进行聚类分析,然后对图像进行联通分析得到初始的分割对象,在此基础上计算每个分割片段在视觉上的突出程度,包括基于对象对比度的唯一性指标和空间聚集性指标。通过对初始分割对象突出程度的定量化计算,突出目标,从而实现目标与背景的分离,得到目标对象。在此基础上采用基于对象的分析方法,在统计目标相关参数的基础上,构建目标过滤规则实现目标的过滤,最终实现目标的检测。
1 目标对象的获取
本文通过FCM聚类对图像进行聚类分析,对图像进行联通分析得到初始的分割对象。根据初始分割对象计算各部分对比度的唯一性指标和空间聚集性指标,通过对对象视觉突出程度的定量化计算,实现对象的分离。
1.1 影像初始分割
FCM聚类方法的目标方程见式(1)[7]。
(1)
其中xj为图像的某像素,uij为xj属于类别i的隶属度,zi∈{z1,z2,…,zC}为类别的中心。
(2)
(3)
(4)
上述式(1)(2)中的d如式(5)所示。
d(xj,zi)=‖xj-zi‖
(5)
通过聚类可以实现对图像的初始分类,通过区域扩张实现对聚类结果的联通分析,从而得到初始目标集合,进一步通过使用区域扩张的方法实现对象的初始分割。设计一种基于哈希表的对象组织和检索策略:对每一个对象obj用唯一标示idobj标识,设计采用一个H×W(H、W为图像区域的大小)的矩阵M(属性标识矩阵)来存储每个点对应的对象唯一标示idobj,对所产生的对象,采用哈希表结构,以对象的唯一标示idobj为key,以obj为值进行存储。这样可以通过idobj快速检索到obj对象,而对于每一个像素,利用属性矩阵M可以快速得到改点所归属的对象。
1.2 对象唯一性指标计算
通过图像的初始分割可以得到对象集合{obji},在对象集合的基础上,借助计算机视觉中的对比分析方法[8-9],计算初始分割对象的唯一性指标,如式(6)。
(6)
其中Nobj为初始分割得到的对象的个数,mobji表示对象的均值,在实际计算中取对象的所有像素的图像坐标均值,pobji为对象的位置,ω(pobji,pobjj)为两对象间的权值。通过引入权值ω(pobji,pobjj)实现全局唯一性指标与局部唯一性指标的结合,而当ω(pobji,pobjj)≈1时,则仅仅考虑全局唯一性指标。
权值ω(pobji,pobjj)采用高斯模型,如式(7)。
(7)
其中σp为控制参数,本文试验中统一为0.3;Zi为归一化因子,满足式(8)所示的约束条件。将式(6)展开,并结合式(8)则可得到式(9)所示的唯一性指标。
(8)
(9)
通过式(7)和式(9)可以得到初始分割对象的唯一性指标。
1.3 对象空间聚集性指标计算
在考虑对象显著度时,不仅仅考虑对象的唯一性指标,同时考虑到对象的空间分布特征,用式(10)来表达对象的空间分布。
(10)
其中pobjj为对象的位置,在实际计算中取对象的所有像素的图像坐标均值;μi定义如式(11)所示,其定义了所有属于类别C的所有像素;ω(mobji,mobjj)定义了对象mobji和对象mobjj间均值的相似度。
(11)
权值ω(mobji,mobjj)依然采用高斯模型,如式(7)所示,并且满足如式(8)所示的约束模型。
此时式(7)中σm为控制参数,依据实验测试在文中设置σm=15。将式(10)展开,并代入(8)式,可以得到式(10)的展开形式如式(12)所示。
(12)
1.4 对象显著度计算
在计算得到每一个初始分割对象的唯一性指标和空间聚集性指标后,可以计算得到对象的显著度,定义如式(13)所示。
Sobji=Uobjiexp(-kDobji)
(13)
其中Uobji与Dobji分别为对象的唯一性指标和空间分布指标;k为控制参数,在试验中发现空间分布指标Dobji能够很好地突出对象的空间分布,因此考虑使用指数函数构建显著度模型,同时通过实验设置k=5。在计算得到对象显著度后,将其归一化到[0,1],并设置阈值th,当对象的显著度高于该阈值时考虑其为目标对象,否则为背景对象。
在得到目标对象后,考虑到目标对象的分割可能不完整,因此对得到的目标对象进行基于对象拓扑关系的合并。在1.1中对图像进行初始分割时,设计了像素所述对象的属性标识矩阵M,通过矩阵M很容易分析得到对象间的拓扑关系。本文中,对象的合并基于对象间的拓扑关系进行,只有拓扑相邻的对象才可以进行合并,合并后需要更新对象所包含的像素信息,同时更新对象的边界像素信息。
2 基于对象分析技术的目标过滤
在完成分割得到对象之后,可以得到对象所包含的像素以及边界像素信息,进一步通过统计对象的相关参数如对象的尺寸、面积等实现对检测对象的过滤[4,10]。文中使用的参数主要包括对象的面积、对象的长宽以及对象的填充度三个方面的信息,具体详述如下。
(1)面积Areaobj:通过分割可以得到每个对象所包含的像素点,设某对象obj包含的像素数为Nobj,则容易得到obj所对应的实际面Areaobj为Areaobj=Nobj×(sizepixel)2,其中sizepixel为影像的空间分辨率。

(14)

(15)
通过式(15)可以发现,可以用Δθ来控制相关值的计算精度,例如,取Δθ=5°,则计算精度超过 99.6%,并且这种方式的计算量很小。

在完成对目标规则参数计算的基础上,通过设定关键参数,实现目标点过滤。本文中借助目标的长宽及填充度可以有效实现目标的过滤。具体而言,设置对象长宽和填充度的阈值分别为Lth=[Lmin,Lmax],Wth=[Wmin,Wmax],Fmin,则候选目标的过滤规则fobj如下:
(16)
3 实验结果及分析
本文挑选了5幅星载热红外影像进行测试,影像的空间分辨率为30 m,场景为海面上的舰船目标,为了定量化评价检测效果,在此定义目标检测的漏警率和虚警率。

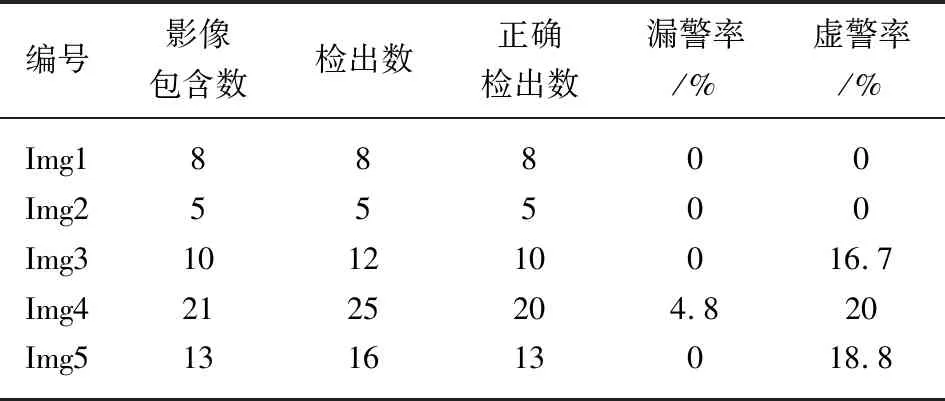
表1 目标检测数目结果表
从表1可以看出,通过采用基于视觉显著性分析算法,克服了单一分割阈值方法的不足,检测结果中普遍具有很低的漏警率,但是虚警率相对较高。通过实际分析,这主要是由于背景噪声引起的。解决这一问题可以通过对检测结果进行对象的过滤,基于对象分析技术,依据先验知识设定判定规则,设置对象的长LMABRobj、宽WMABRobj以及填充度Fobj阈值,设定候选目标的过滤规则fobj如式(18),能够有效的实现目标的过滤从而降低目标检测的虚警率。
4 结 语
本文借鉴计算机视觉中对比显著性分析的相关策略和思路设计了一种新的红外目标检测算法。利用FCM可以实现对图像的聚类,通过联通分析得到初始的分割对象,在此基础上计算每个分割对象的唯一性指标和空间聚集指标,进而得到目标在视觉上的突出程度,从而实现目标与背景的分离。采用基于对象分析的方法,在统计目标相关参数的基础上,构建目标过滤规则实现目标的过滤和最终提取。实验结果表明本文提出的算法可以有效地从红外图像中提取目标,具有较好的实用价值。
猜你喜欢
环球时报(2022-05-23)2022-05-23
金桥(2021年4期)2021-05-21
铁道通信信号(2019年6期)2019-10-08
电子制作(2019年7期)2019-04-25
电子制作(2019年7期)2019-04-25
西部资源(2016年6期)2017-04-24
雷达学报(2017年6期)2017-03-26
广东教育·高中(2016年7期)2016-05-14
互联网天地(2016年1期)2016-05-04
课程教育研究·学法教法研究(2016年1期)2016-03-17