线性二次型调节器算法研究
2019-01-28 07:21:44朱云昊汤卫红
现代导航 2018年6期
朱云昊,汤卫红
(海装西安局 西安 710068)
0 引言
四旋翼飞行器结构简单、轻便易携带、能垂直起降、自由度高,是一种良好的验证飞行控制算法的平台,无人机飞行控制系统是其能够安全、有效地完成复杂战术、战略使命的基本前提,因此,研究无人机的自动飞行控制技术具有十分重要的现实意义。目前线性二次型调节器(LQR)在处理可精确数学描述的对象时取得了很大的成功,在提高飞行控制系统的稳定性方面能发挥较大作用。
1 线性调节器方程
其中,x为n维状态向量;u为r维控制向量,且u不受限制。寻找一个最优控制,使

为极小。
其中,F为n∗n对称半正定常数阵;Q(t)为n∗n对称半正定时变阵。R(t)为n∗n对称正定时变阵。求解这个最优控制问题,可以用极小值原理,也可以用动态规划法。这里用极小值原理来求解。
1.1 极小值原理求解
(1)哈密顿函数为

(2)伴随方程为

(4)将u*代入状态方程得

初始状态为x(t0)
1.2 另外一种求解方式:Riccati微分方程[1]
设

其中,P(t)为待定的n∗n时变阵。
称为Riccati微分方程。其边界条件为


状态反馈的闭环方程为
最优性能指标为
2 线性伺服机方程
要求系统的输出跟踪指定的输入函数η(t)。η(t)与输出向量y有相同维数。寻求最优控制u*(t),使以下性能指标取极小值[2]。
2.1 极小值原理求解
性能指标中的加权阵F和Q(t)为半正定,R(t)为正定。
控制方程为
边界条件为
2.2 另外一种求解方式:Riccati微分方程
这时不能像线性调节器那样,仅认为λ(t)和x(t)有关系。为此,设

对t求导:
最优控制

可见,u*包括两项:一项是状态x反馈;另一项代表跟踪η(t)所必须的控制信号。
线性时变系统·方程
系统能控的条件下,无限时间伺服机问题的最优控制解存在,并且可以通过有限时间伺服机问题的解取tf→∞的极限求得。于是
最优控制

3 算法的解释[3]

系统的协态方程为

横截条件:

转移矩阵Ω(t,t0),该齐次方程组满足初始条件λ(t)=p(t)x-ξ(t)


将Ω(t,t0)2n*2n分为四个n∗n的子矩阵,可以得到

可以得到:
令

所以λ(t)=p(t)x-ξ(t)。
4 线性二次型框图
输入的控制量与反馈的状态之间会有一定误差e,通过LQR控制使得误差e保持在最小,使输出状态与预期尽可能保持一致,求出最优控制u,使误差取最小值[4]。
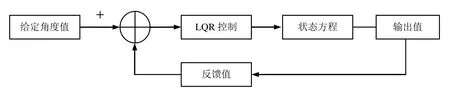
图1 LQR控制框图
5 小结
本文详细的描述线性二次型调节器的基本原理及算法,从算法的构造,推导,解算,解释等几个方面,结合线性二次型的分类,说明了该算法的详细流程。结合原理,画出了线性二次型的基本结构框图。
猜你喜欢
数学年刊A辑(中文版)(2021年1期)2021-06-09 09:32:02
中学数学研究(江西)(2020年5期)2020-07-03 03:41:54
汽车维修技师(2019年7期)2020-01-16 04:33:04
中学数学研究(江西)(2019年11期)2019-12-31 01:58:50
数学物理学报(2019年3期)2019-07-23 01:15:38
数学物理学报(2018年3期)2018-07-17 06:15:30
科技风(2018年19期)2018-05-14 02:18:35
汽车维修技师(2018年11期)2018-05-11 02:38:32
中学生数理化·高一版(2017年1期)2017-04-25 13:22:35
自动化学报(2017年1期)2017-03-11 17:31:08