
大型水陆两栖飞机抗浪能力研究
2019-01-24 06:02黄淼褚林塘李成华蒋荣唐彬彬吴彬
航空学报 2019年1期
黄淼,褚林塘,李成华,蒋荣,唐彬彬,吴彬
1. 中国特种飞行器研究所,荆门 448035 2. 高速水动力航空科技重点实验室,荆门 448035 3. 中航工业通用飞机有限责任公司,珠海 519030
水陆两栖飞机的抗浪能力是指飞机在波浪中水阻力、运动稳定性、喷溅特性、载荷响应的综合性能[1],具有高抗浪能力是大型水陆两栖飞机设计的重要目标,以增强飞机对海洋环境的适应性,提高飞机的出勤率。
船体是水陆两栖飞机最重要的水动部件,国外对水陆两栖飞机船体抗浪性的研究主要有,Elmo通过对比飞机在静水和波浪水阻力特性,研究了波浪对水上飞机阻力的影响[2],文献[3]对飞机在规则波中的起飞和着水距离进行了分析,文献[4-5]通过开展模型试验,研究了船体横向斜升角、长宽比、波高、速度对船体在波浪中运动响应的影响。国内自20世纪80年代研制了水轰五飞机后对水上飞机的研究较少,但对高速滑行体的耐波性进行了相关研究,主要集中在研究高速滑行体在迎浪运动中的时域解和频域解[6-7],研究船体在波浪中的运动响应特性[8-9],提出了船体在波浪中自由运动时水动力性能预报方法[10]。近年来,国内逐步开展了针对水陆两栖飞机船体水动力性能的研究,唐彬彬等研究了船体抑波槽宽度对喷溅的影响[11],武庆威等提出了一种水上飞机滑行阶段水阻力估算方法[12],江婷等对水上飞机纵向稳定性的判别方法开展了研究[13],黄淼等对水陆两栖飞机模型波浪试验技术、飞机在波浪上的运动响应以及船体的水动力矩特性进行了研究[1,14-15]。
水陆两栖飞机在水面起飞过程中,快速性、滑行稳定性和波浪水面运动响应对飞机运动安全有重要影响。在低速时水陆两栖飞机处于排水航行状态,与船的运动状态相似,此时主要由静浮力支撑飞机,气动力和水动力影响很弱。在中高速时水动力和气动力占主要作用,此时飞机的姿态受到水动力、气动力的共同影响,通过升降舵的操纵可使飞机的姿态在较大范围内变化,姿态过小或过大会使飞机出现海豚运动或跳跃等不稳定运动现象[16]。此外,飞机姿态的改变对水阻力的影响很大,离水起飞前飞机处于最佳的滑水姿态能保证船体仅有断阶参与滑水,姿态减小或增大会使船体的前体或后体滑水面积增大,从而增加水阻力,影响飞机的起飞滑水时间和距离。
船体的布局形式及其线型参数是船体设计的关键因素,本文从船体设计、水阻力特性、纵向滑行稳定性和波浪水面运动响应特性等方面对大型水陆两栖飞机的抗浪能力进行研究。
1 高抗浪船体设计
为提高大型水陆两栖飞机的水动力综合性能,在设计船体时充分考虑到了船体关键参数对性能的影响。研究表明大长宽比船体能有效地减小飞机着水载荷,纵摇和飞高运动响应相对较为温和,有利于提高飞机对波浪的适应性,但是船体的喷溅较大[17-20];船体的横向斜升角从20°增加至40°时,飞机能稳定滑行的纵倾角范围增大,重心稳定前后限增加,波浪中着水过载减小55%,喷溅性能有所改善,但是水阻力增加,使飞机的起飞滑水时间和滑水距离分别增大了25%和30%[21];此外,采用前体扭曲设计后能有效地增大飞机稳定滑行范围[22]。大型水陆两栖飞机船体采用大长宽比设计以增强飞机的抗浪能力,为了改善飞机的喷溅特性,在前体前部设计抑波槽以降低飞机低速段的喷溅高度和宽度。在中高速运动时,主滑行面对船体的水动力性能影响最大,在设计主滑行面时为平衡斜升角的变化对水阻力、滑水稳定性和着水载荷的影响,将主滑行面设计成带舭弯的横截面形式,在舭宽一定的前提下,这种横截面形式能有效增大主滑行面的斜升角,提高飞机滑水稳定性并降低着水载荷[23],还有利于引导附着在舭弯水流的流动方向,使水流以一定的角度向下流向水面,阻止水流继续沿着机身侧面向上流动而增大摩擦阻力。此外,在1.5倍断阶宽度的主滑行面内采用扭曲设计,即不同横截面处横向斜升角不相同,主滑行面从前往后斜升角逐渐减小,以兼顾滑水稳定性和水阻力;在设计纵剖线角度的分布规律时,将主滑行面看成是一系列单位宽度的、以不同角度滑水的平板的总和,考虑到平板滑水时吃水越深、滑水角度越大则水阻力越大[24],而主滑行面中剖面处吃水最深,从中剖面往两侧吃水逐渐减小,因此在设计时保持中剖面附近纵剖线角度较小,而往两侧纵剖线角度可稍大,以提高有效滑行角度增加主滑行面的水动升力。
2 试验研究方法
试验原理见图1,沿轨道运动的拖车带动模型以一定的速度沿航向运动,根据文献[16],飞机的纵摇运动和飞高运动的运动稳定性影响最显著,在研究大型水陆两栖飞机的抗浪能力时可将飞机限制为航向移动、俯仰转动和垂向移动(飞高)的3个自由度。滑车在拖车上沿航向能在一定范围内运动,前端连接阻力仪。升沉杆穿过滑车且下端与模型在重心处铰接,可与模型一起在垂向移动,模型能在俯仰方向以重心处为支点转动,升沉杆上端连接线位移传感器。偏航限制器限制模型的偏航运动,与滑车及升沉杆系统一起限制模型的侧向移动和横倾。
试验过程中利用阻力仪、倾角传感器以及线位移传感器分别测试模型受到的阻力、纵倾角及飞高响应,波浪试验中利用加速度传感器测量模型的滑水载荷,各传感器的量程及精度见表1,表中1 kgf=9.8 N,FS为精度和满量程的百分比。
由于有自由液面及兴波的存在,重力对水的流动有重要影响,因此水池拖曳试验以傅汝德数相似原理为基础,满足该相似原理时试验模型与实机之间物理量的对应关系见表2[25],并以此作为确定试验模型尺寸、重量、速度等试验参数理论值的依据。生产的试验模型外形与理论值的差异在-1~0 mm之间(利用卡板和塞尺对外形进行检验,在所有站位处卡板能合拢且与模型外形之间的最大间隙不超过1 mm),模型的重量、俯仰惯性矩与理论值之间的差异分别为-0.1%、4.8%。
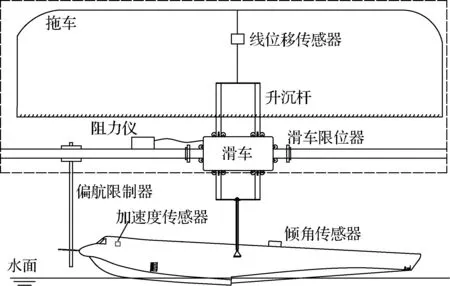
图1 试验原理简图Fig.1 Illustration of test principle
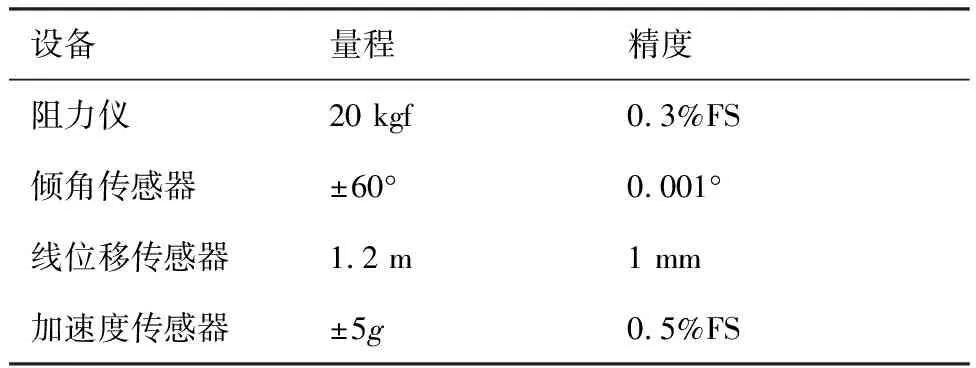
表1 试验用仪器设备Table 1 Measuring equipment used in test
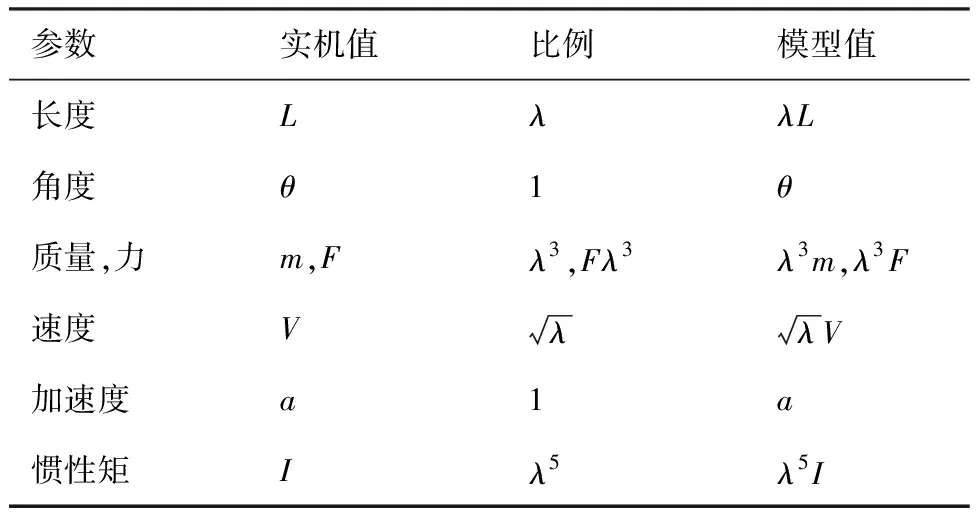
表2 模型与实机比例关系 [25]Table 2 Ratio of full scale and model value [25]
表2中λ为试验模型缩尺比例(该试验模型λ=1∶8.5)。由于缩尺比例的影响,模型的雷诺数一般比实机的雷诺数低1~2个量级左右。雷诺数主要影响黏性力,在水阻力中,黏性力所占比例较小,对于气动阻力,根据文献[26],采用大相对厚度翼型的运输类飞机,当雷诺数相差1个量级时翼型气动力系数差异最大值在15%左右。为解决模型与实机之间雷诺数不相似引起的气动力差异问题,提出的解决办法是:试验时首先测量模型在试验室环境下的气动力特性,将模型提升使模型最低点距水面10~20 mm,拖车带动模型以固定的纵倾角、恒定的速度运动(此时模型不接触水面),测量模型气动升力、阻力以及俯仰力矩特性。然后开展模型水面滑行试验,由拖车带动模型以恒定的速度沿航向运动,测量模型受到的总阻力、垂向位移和纵倾角,将该总阻力减去模型的气动阻力得到试验模型的水阻力。
3 水阻力性能
水陆两栖飞机在水面起飞过程中水阻力变化典型特征如图2所示,图中横坐标为速度,VTO代表飞机的离水速度(Take-off Velocity)。飞机在水面上滑行起飞过程中,随着速度的增大水阻力会出现一个峰值,该峰值的大小、位置对飞机的滑水起飞时间和距离有较大影响。随着速度的进一步增加,水动升力迅速增大,参与滑水的船体面积逐渐减小,水阻力逐渐减小,在离水前水动力主要集中在主滑行面靠近断阶的一段三角区域内,且压力很大,这样在断阶处产生流速很高的喷溅流束向后运动,在接近离水速度时,喷溅流束有可能吸附在后体机身上,对机身形成冲刷作用从而增加额外的阻力,该阻力增量使水阻力出现第2个峰值,如图2中实线所示,如果尾流迹没有吸附在后体机身上,则不会形成第2个阻力峰值,如图2中虚线所示。该峰值出现与否,以及大小与飞机的运动状态有关,因此研究水阻力性能时要结合飞机运动状态进行分析,避免出现第2水阻力峰值,以提高飞机的起飞性能。
图3为两个不同状态下飞机无量纲水阻力系数(水阻力与模型重量的比值)随速度变化曲线。当速度为47%VTO时水阻力达到峰值,速度小于86%VTO时,两个状态的水阻力系数基本一致,但速度在94%VTO时,状态1的水阻力出现了第2峰值,该峰值为第1阻力峰的73.8%,比同速度下状态2的水阻力增大了52.3%。在高速状态下,飞机的水阻力主要为摩擦阻力和喷溅阻力,从图4、图5所示的飞机运动状态可以看出,状态1的喷溅形态非常稳定,喷溅流束与机身之间有充足的空气流动,阻止了喷溅流束吸附在机身上,而状态2从断阶产生的喷溅流束完全吸附在后部机身上,使摩擦阻力迅速增大,从而导致第2阻力峰值的出现。
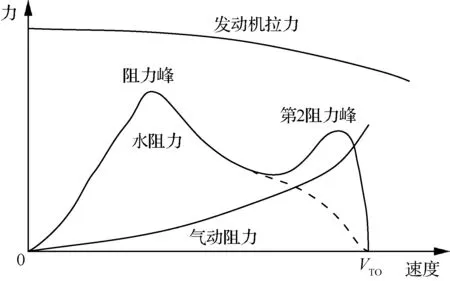
图2 水面起飞过程水阻力变化典型特征Fig.2 Typical characteristics of change of hydro-resistance in process of take-off

图3 水阻力随速度变化曲线Fig.3 Curves of hydro-resistance with speed

图4 状态1飞机运动状态Fig.4 Motion state of aircraft for status No.1

图5 状态2飞机运动状态Fig.5 Motion state of aircraft for status No.2
进一步对比分析发现,飞机主断阶喷溅形态是影响是否出现第2峰值水阻力关键因素,飞机在中低速运动时,船体滑水面积较大,仅产生舭线方向的喷溅,而在离水前状态速度较高,仅主滑行面靠近断阶的一部分船体滑水,此时除产生舭线方向喷溅外,还有断阶方向的喷溅。当飞机纵倾角θ(机身的水平基准线与水平面的夹角,如图6所示)较小时,断阶方向的喷溅沿着主滑行面切线方向流动,此时喷溅与船体后体之间存在间隙。随着纵倾角的增大,断阶方向的喷溅无法继续保持沿主滑行面切线方向流动,喷溅抬高,喷溅与船体后体之间的间隙减小,直到吸附在船体后体上。经过对大量的模型水池试验结果分析发现,当速度达到80%VTO、纵倾角比后体龙骨角β大1°时,飞机易出现水阻力第2峰值。因此飞机在水面起飞时要通过操纵升降舵保持飞机纵倾角处于合适位置,以避免水阻力第2峰值的出现。

图6 水陆两栖飞机船体主要特征Fig.6 Principal features of amphibian aircraft hull
4 纵向滑行稳定性
飞机从水面起飞与从地面起飞最大不同之处在于,从地面起飞时有起落架支撑,在到达抬前轮速度之前,飞行员可通过操纵舵面控制飞机以稳定的纵倾角滑行。从水面起飞时,由于飞机受到水动力的大小及作用点位置不断变化,飞机在水面滑行姿态先增大后减小,出现明显的纵倾峰。飞机在水面滑行纵向稳定性取决于飞机重心与水动力、气动力合力作用点之间的位置关系。只有当水动力、气动力合力的作用点在重心之后,使绕飞机重心的俯仰力矩对纵倾角变化曲线的斜率为负时,才能保证水上飞机在水面滑行时稳定。
当飞机进入滑行状态以后,仅船体的主滑行面参与滑水,水动力作用集中在断阶前一段三角区域内,此时如果飞机以较小的纵倾角滑行,受到干扰后会引起水动力作用点位置急剧变化,特别是飞机受到低头干扰时飞机纵倾角进一步减小,水动力作用点迅速前移,使水动力和气动力合力作用点移到重心之前,飞机变得不稳定,容易出现海豚运动。当飞机运动姿态角较大时,飞机易出现跳跃运动,这种运动状态为飞机受到干扰后若姿态角增大,气动力迅速增大使飞机瞬间离开水面,但由于气动力不足以支撑整个飞机的重量,飞机再次着水。对应于出现海豚运动、跳跃运动的速度和纵倾角的位置分别为下稳定边界和上稳定边界,水陆两栖飞机典型滑水稳定边界如图7所示。
在不同的区域内飞机的纵倾角有不同的特性。在稳定区域内,飞机的纵倾角响应比较稳定,在受到干扰后能迅速收敛,即使受到干扰的瞬间飞机纵倾角超出稳定下边界,纵倾角也能恢复到受干扰前的状态,而在稳定边界附近或超出稳定边界时,受到干扰后纵倾角响应发散,或是未受到干扰时纵倾角响应出现发散。图8~图10所示为试验模型以恒定速度运动时纵倾角变化曲线,图中横坐标为模型运动速度稳定的时间段,纵坐标为模型的纵倾角。图8所示运动状态在稳定区域内,模型在受到干扰前纵倾角平均值为4.93°,在15 s时刻模型受到人为施加的瞬态低头干扰,干扰值为4.55°,干扰后模型纵倾角最小值达到0.38°,此后模型纵倾角迅速收敛,在17.5 s时刻收敛到受干扰前的状态。图9所示状态在稳定下边界附近,可以看出模型受到干扰后,纵倾角响应发散不收敛。图10所示的运动状态,模型在未受到干扰时纵倾角响应本身已经发散。

图7 水陆两栖飞机典型稳定边界示意图Fig.7 Schematic diagram of typical stability boundary of amphibian aircraft
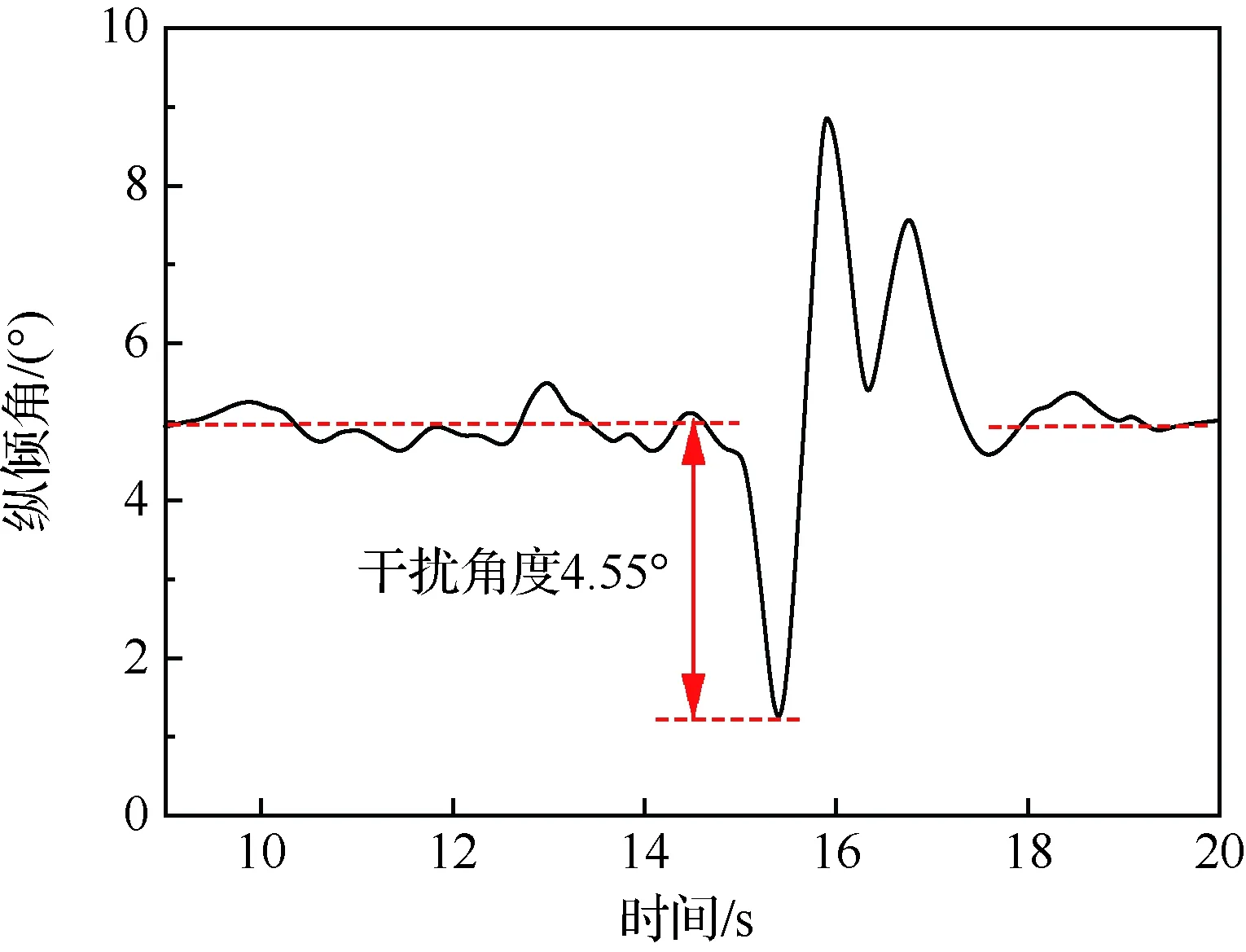
图8 受到干扰后纵倾角响应收敛Fig.8 Convergence of trim angle after disturbance
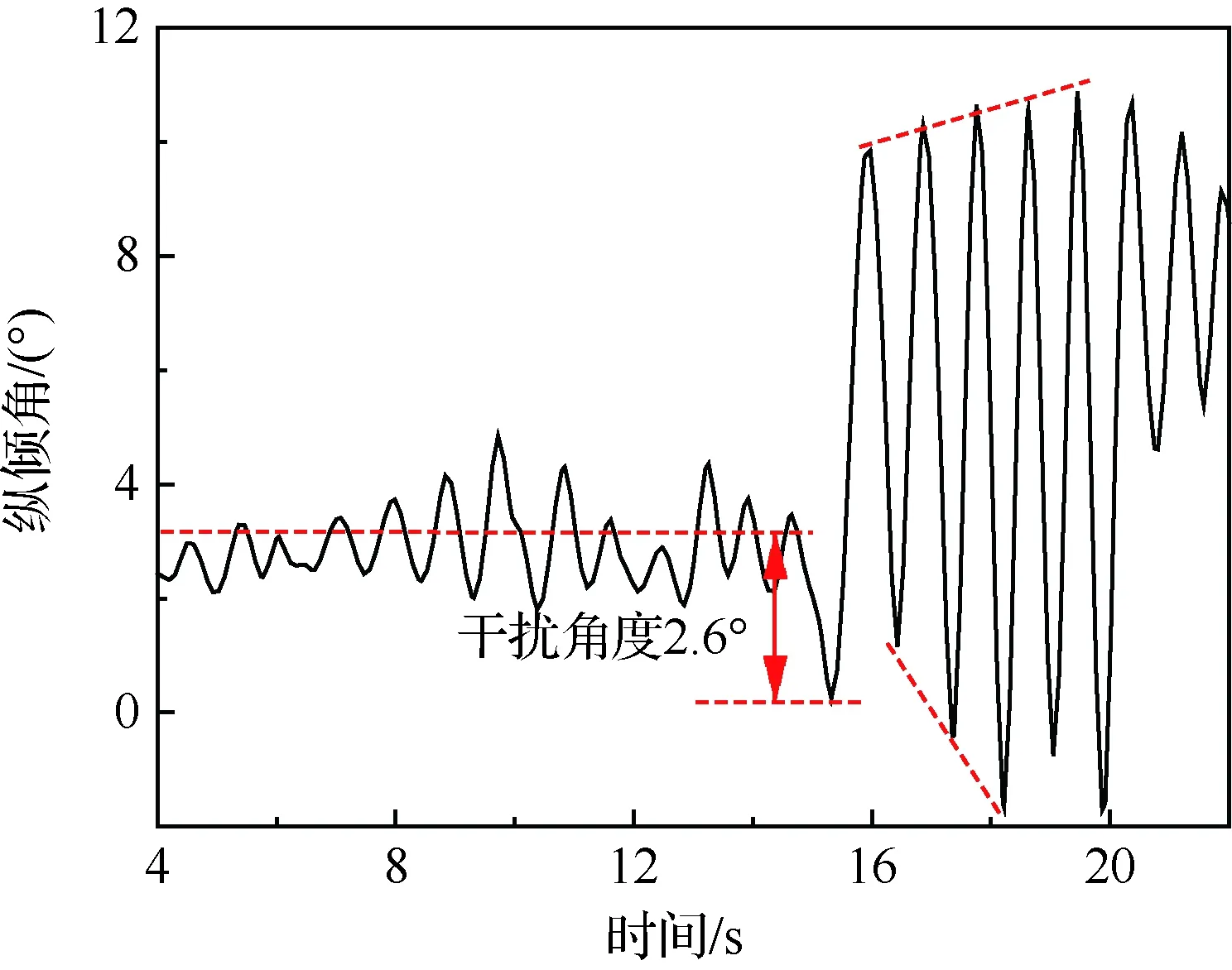
图9 受到干扰后纵倾角响应发散Fig.9 Divergence of trim angle after disturbance
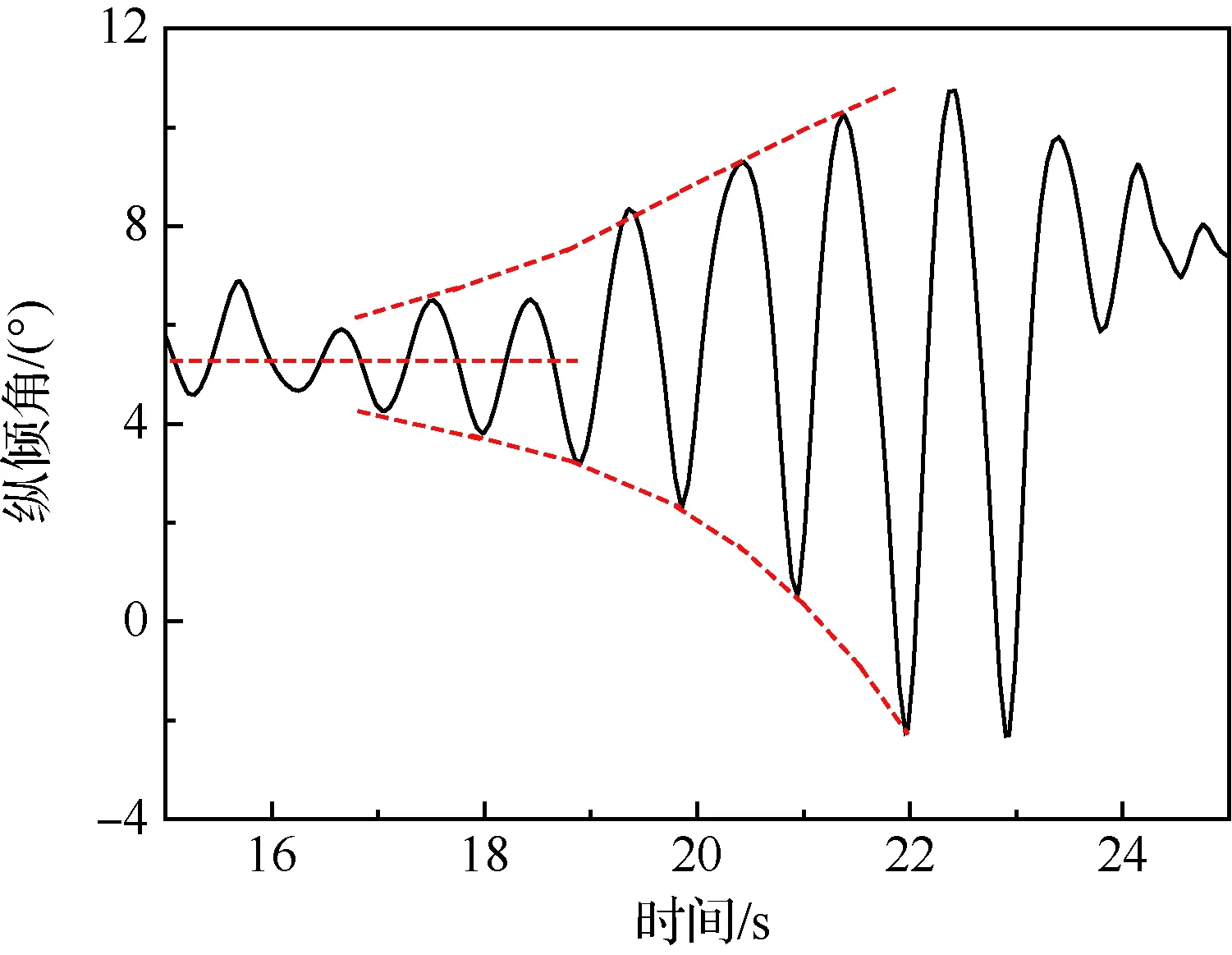
图10 未受到干扰时纵倾角响应发散Fig.10 Divergence of trim angle without disturbance
为增强水陆两栖飞机的滑行稳定性,一般要求飞机稳定滑行范围较宽,以保证飞机在较大的升降舵偏角范围内能稳定滑水起飞,国军标《有人驾驶飞机(固定翼)飞行品质》要求“稳定区域的纵倾角范围不得小于3°”此外,还需通过研究确定飞机稳定滑行边界范围。
图11所示为飞机在不同升降舵偏角时纵倾角随速度的变化曲线,可以看出飞机在静水面上纵倾角能达到的最大值在7.5°左右,当飞机纵倾角达到后缘角附近时,整个后体参与滑水,后体受到的水动升力形成较大的低头力矩阻止飞机纵倾角进一步增大,从模型水池试验模型运动状态来看,飞机在该角度下滑行时运动稳定,未出现跳跃现象。针对下稳定边界,在速度65%VTO、纵倾角3.8°,速度72%VTO、纵倾角2.5°时出现了海豚运动,说明这两个状态已处在飞机下稳定边界上,而其他状态均稳定滑行。从图中还可以看出,在速度为65%VTO时飞机稳定边界范围最低,纵倾角稳定范围为3.8°。

图11 飞机稳定边界图(设计载重、重心后限)Fig.11 Stability boundary of aircraft (status of designed load, after center of gravity limit)
5 波浪运动响应
由于波浪水面的不规则性,作用于船体水动力的大小、作用位置不断变化,使飞机的纵倾角、飞高运动响应在一定范围内波动,波动幅值的大小是影响飞机运动稳定性的关键因素。此外,相对于静水中飞机能稳定滑行不同,在波浪中滑行时船体垂向会出现过载响应,过载响应的峰值、响应周期对机载人员的生理影响明显,是限制机载人员操作能力、造成生理不适的重要因素。
图12~图14所示为规则波试验得到的模型纵倾角、飞高以及机身垂向过载响应特性。试验原理见图1,根据傅汝德数相似准则,以及俄罗斯中央流动动力研究院提出的规则波波高或涌浪(可近似看出规则波)与3%保证率波高H3%的换算关系,试验波浪环境相应于实机对应的波浪为波高0.7 m的涌浪或3%保证率波高H3%=1.4 m的风浪,波长为20~160 m。试验速度分别为32.2%VTO、48.3%VTO、64.4%VTO。
图12所示为试验模型纵倾角波动幅值变化曲线,可以看出,速度为32.2%VTO时,纵倾角波动幅值曲线的共振波长(峰值对应的波长)为1.5倍船体长度,速度为48.3%VTO、64.4%VTO时纵倾角有两个峰值,第1峰值共振波长分别为0.5倍和0.8倍船体长度,第2峰值共振波长分别为1.8倍和3倍船体长度。总体来看,随着速度的增大,峰值的大小和共振波长均增大。
图13所示为试验模型飞高波动幅值变化曲线,可以看出,不同速度时该曲线只有一个峰值,随着波长的增大,飞机飞高运动响应逐步增大,当波长为2~4倍船体长度时,飞高运动响应达到峰值状态。在该波长范围内,飞机飞高响应始终保持较大的波动幅值,在同一波长时,随着速度的增大,飞机飞高波动幅值增大。
图14所示为机身首部垂向过载变化曲线,图中g表示重力加速度。可以看出,与纵倾角波动幅值曲线变化规律相似,速度为32.2%VTO时垂向过载曲线有一个峰值,共振波长为1.4倍船体长度,速度为48.3%VTO、64.4%VTO时有两个峰值,第1峰值共振波长分别为1.1倍和0.9倍船体长度,第2峰值共振波长分别为1.4倍和2.2倍船体长度。
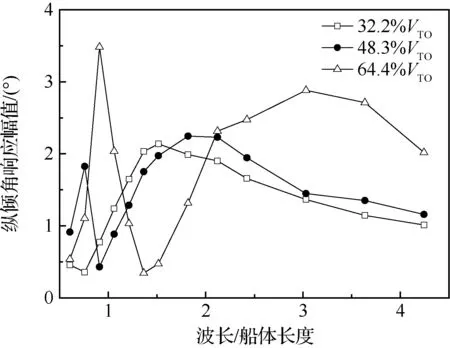
图12 波浪中飞机纵倾角响应特性Fig.12 Trim angle response characteristics of aircraft to wave
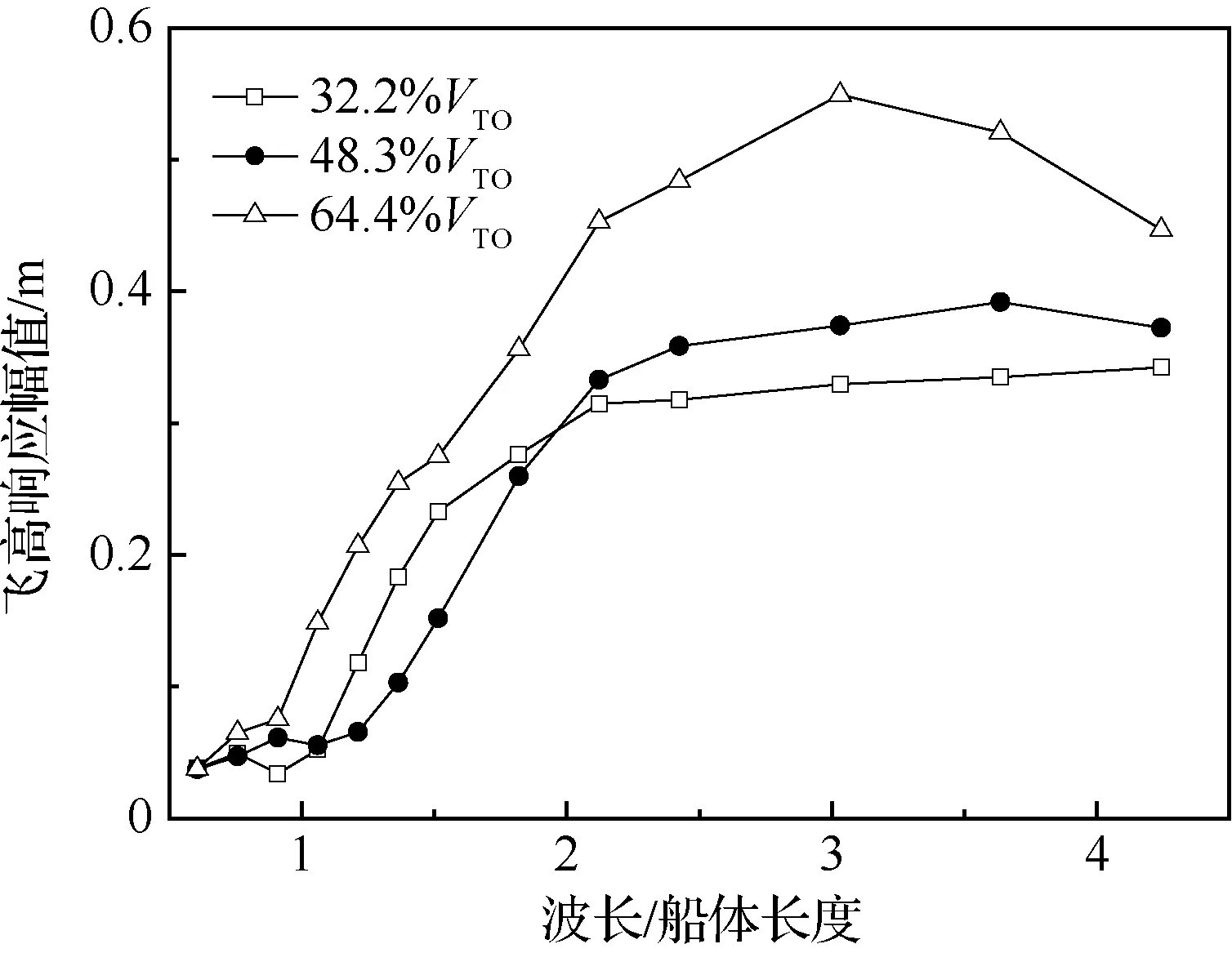
图13 波浪中飞机飞高响应特性Fig.13 Heave response characteristics of aircraft to wave
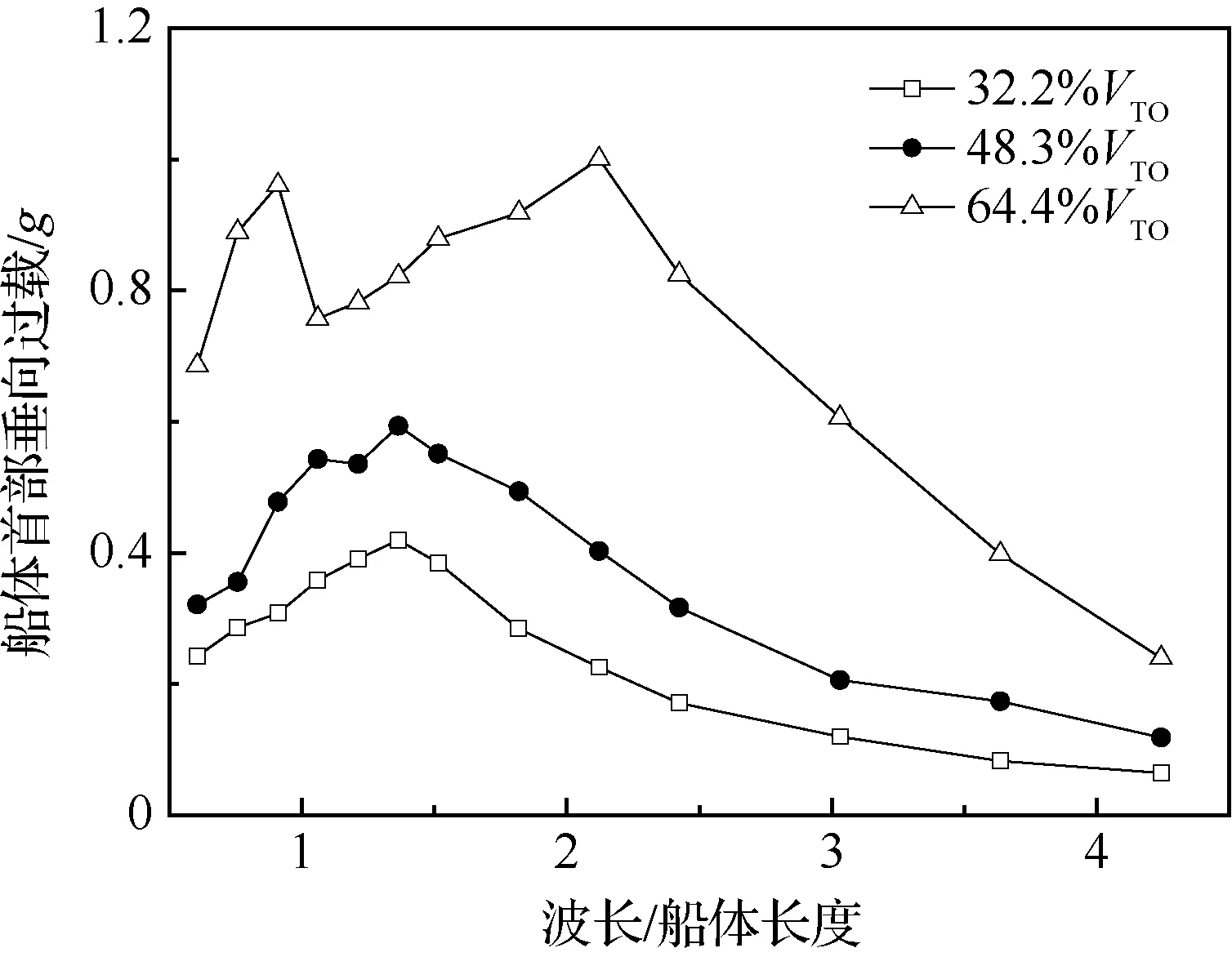
图14 波浪中飞机首部垂向过载响应特性Fig.14 Vertical load response characteristics of aircraft forebody to wave
6 结 论
在对大型灭火/水上救援水陆两栖飞机船体综合性能优化设计的基础上,对船体水阻力、滑行稳定性及波浪运动响应特性进行了研究,得到了如下结论:
1) 对于该飞的船体,当速度达到80%VTO、纵倾角比后体龙骨角大1°时,断阶方向的喷溅易吸附在后体上,使水阻力出现第2峰值,其他状态水阻力均不会出现第2峰值。起飞时可通过操纵升降舵使飞机纵倾角小于后体龙骨角避免水阻力出现第2峰值。
2) 当飞机以较小纵倾角滑行时,受到低头干扰后船体水动力作用位置明显前移,使水动力和气动力合力作用点位置移动至重心之前,飞机易出现海豚运动。
3) 在纵倾角-速度稳定区域图中,当飞机运动状态在稳定区域内时,受到干扰后飞机纵倾角能迅速受到干扰前的状态;在稳定边界附近或边界以外时,受到干扰后飞机纵倾角迅速发散,或是未受到干扰前纵倾角响应本身就发散。
4) 飞机在波浪中运动时,当波长为0.5~4倍船体长度时,飞机的纵倾角、飞高响应和机身垂向过载响应较为剧烈,速度越大,纵倾角、飞高波动幅值和机身垂向过载峰值越大。
需要指出的是,上述研究结论是基于模型试验得到的,得到的水阻力峰值特性、第2水阻力峰值出现的条件,以及滑行稳定边界位置对大型水陆两栖飞机水上首飞起降操纵程序的制定有重要的指导意义。由于实验室无法模拟三维不规则波,飞机在波浪中的运动响应仅考虑了规则波浪环境,飞机在不规则波中的运动特性还需在后续的试飞中加以研究。
猜你喜欢
船舶物资与市场(2022年8期)2022-11-26
舰船科学技术(2022年11期)2022-07-15
北京汽车(2021年3期)2021-07-17
科学大众·小诺贝尔(2021年10期)2021-01-22
船舶标准化工程师(2019年4期)2019-07-24
智慧少年(2019年5期)2019-07-23
电子制作(2019年9期)2019-05-30
中学科技(2018年6期)2018-09-21
当代体育科技(2017年5期)2017-11-28
速读·中旬(2015年10期)2015-10-21
