甚高频超声皮肤三维成像的研究与实现*
2019-01-23 09:23王韬王文赛宋学东高璇齐珊王延群杨军
生物医学工程研究 2018年4期
王韬, 王文赛, 宋学东, 高璇, 齐珊, 王延群, 杨军△
(1.北京协和医学院 中国医学科学院 生物医学工程研究所,天津300192;2.天津迈达医学科技股份有限公司,天津300384)
1 引 言
传统的二维超声一次只能提供一幅或几幅二维图像,而人体脏器结构是三维空间分布的,仅仅依靠二维图像来理解三维结构有一定的局限性。Howry于1956年首次提出了三维超声成像[1],经过六十多年的发展,三维超声成像已经在临床上得到了广泛的应用,而在皮肤科,国内还没有用于临床的相关仪器,现有的三维成像仪器,如磁共振成像和计算机断层扫描成像分辨率低,无法区分小于3 mm的组织结构[2-3]。在二维成像中,对浅表组织进行成像的激光共聚焦显微镜和光学相干断层成像(optical coherence tomography, OCT)虽然具有较高的分辨率,但两者的探测深度都较浅[4](激光共聚焦显微镜<0.5 mm,OCT<1.5 m),因而也限制了其应用。甚高频超声(频率范围为30~300 MHz)在分辨力和探测深度上有较好的折中,中心频率为50 MHz时,轴向分辨力为40 um,探测深度能达到4 mm[5],因而非常适合用来对皮肤进行三维成像,除此之外甚高频超声也越来越多的被应用于皮肤等浅表器官的疾病诊断中[6-7],如皮肤炎症的检测[8]、皮肤肿瘤的诊断[9]等。
三维超声成像分为三维数据采集、三维重建及三维图像的显示。三维探头获得的切片精度和体数据获取速率直接影响三维成像的质量和帧率,目前超声三维数据的采集方式主要有机械定位式三维探头扫查、二维面阵探头和自由臂扫查。三维重建即将二维平面图像数据转换成三维结构数据,而三维图像的显示即将三维结构数据逼真的显示在二维平面上。目前常用的方法有表面绘制技术和体绘制技术,表面绘制通常通过一系列的多边形来绘制表面以及显示三维模型,最典型的算法为移动立方体(marching cube,MC)算法[10],表面绘制算法适用于描述结构轮廓,但无法显示结构内部信息。体绘制技术根据三维数据结构中的灰度值、灰度值梯度、空间坐标等属性来决定显示的亮度值。光线投射法[11]是典型的体绘制算法之一,光线投射运算量大,但是能将所有的三维信息显示在二维图片上,渲染效果较好。为了减少运算量,Basso等提出了错且变形算法[12],但是该算法以牺牲图像质量为代价来加快体绘制速度,对于相对静态的皮肤,重建的质量要比重建速度更为重要。
本研究设计一套基于现场可编程门阵列(field programmable gate array,FPGA)的甚高频超声皮肤三维成像系统,该系统采用平行扫查的方式采集三维超声数据,并利用开源的三维可视化工具包和光线投射法对正常人前臂上侧皮肤进行三维重建。
2 方法
2.1 系统总体设计
本研究设计的甚高频超声皮肤三维成像实验装置系统框架见图1,主要由自制机械三维扫描探头,下位机模块和上位机组成。机械三维扫描探头由两个步进电机以及50 MHz的单阵元圆形聚焦换能器组成,其中一个步进电机的轴平行于z方向布置,该电机的电机轴为螺杆结构,通过电机轴上的螺纹与一个带有螺纹孔的连接板连接,给步进电机施加脉冲则带动连接板及连接板上的装置沿着z方向运动,其运动的距离Iz见式(1),其中n为所施加的脉冲个数,θs为步进电机步距角,s为螺杆导程,另一个步进电机则安装在连接板上,其电机轴则平行于x方向布置,通过齿轮、齿条以及导轨滑块等机构带动下方的换能器在x-y方向上扫描,从而获得x-y方向切片数据。

图1 三维成像系统框架Fig 1 Frame of the three-dimensional imaging system
(1)
下位机模块包括FPGA主控模块,探头驱动电路以及存储、通讯模块,FPGA主控模块通过外围的探头驱动电路控制机械三维扫描探头内的两个步进电机运动时序,从而采集体数据,采集体数据过程见图2,每当换能器获得一张x-y平面上的二维超声切片图后,FPGA给步进电机施加脉冲带动换能器在z方向上移动,再继续获取下一张二维切片,最终实现平行扫查,在获得二维切面序列即体数据的同时,FPGA将数据缓存到SRAM存储器,再通过USB接口将体数据传到上位机。
上位机为计算机以及控制程序,该控制程序主要分为两个模块,一个是和下位机通讯的模块,该模块主要功能是下达指令控制下位机以及接收下位机上传的二维切片序列,并将二维切片序列保存成BMP格式图片,另一个模块为基于可视化工具包(visualization toolkit,VTK)的皮肤三维重建及显示模块,该模块的主要功能是将保存的图片进行三维图像的重建和三维图像的显示。实验中三维重建使用的上位机配置如下:CPU型号为Intel Core I7-7700,显卡型号为Nvidia GeForce GTX1080,内存大小为16 G。

图2平行扫查
Fig2Parallelscanning
2.2 三维可视化
三维重建及三维图像的显示即三维数据可视化,VTK是最具代表性的数据可视化编程工具包之一[13-15]。上位机在接收到二维图像序列后即开始进入VTK可视化渲染管线,整个管线设计见图3,首先通过VTK读取器来读取二维图像序列,其后根据扫描中二维图像所在实际位置映射到三维体积晶格中。机械三维探头在z方向上的分辨率低于二维图像的分辨率,因此需要对数据进行插值来获得均匀的三维数据矩阵,同时为了降低二维切片噪声对重建质量的影响,还需要对体数据进行二维或三维滤波处理,其后渲染管道分为两部分,第一部分为基于GPU的光线投射法体绘制,在二维切片中,不同组织和结构的灰度值不同,根据灰度值和灰度值梯度设置不透明度传递函数和颜色传递函数,VTK渲染器根据不透明度传递函数和颜色传递函数合成各体素的颜色和不透明度,最后利用光线吸收模型将颜色和不透明度进行累加生成最终显示的二维图像。第二部分为平面交互与切片显示,通过提供三维数据的二维切片可以帮助医生更好的理解三维图像。
3 实验设计
使用本研究设计的甚高频超声三维成像系统对超声体模以及志愿者前臂上侧皮肤成像,采集100张大小为576×760像素的二维切片图像,见图4,切片灰度值范围为0~255,实验中使用的步进电机步距角为1.8°,螺杆导程为0.6096 mm,步进电机每走一步带动换能器在z方向移动0.003048 mm,通过FPGA控制步进电机采集完一张切片后走33步,从而切片间隔为100,切片插值倍数为5倍,插值方式为线性插值,实际成像范围为11x14.5x10 mm。超声体模由纯水、琼脂、氧化铝粉末经恒温磁力搅拌器加热、搅拌、凝固而成,琼脂的质量浓度为5%,氧化铝粉末的质量浓度为2%。超声体模见图5,呈圆柱形,直径为6.51 mm。光线投射算法中不透明度传递函数设置见图6,由于采集到的二维切片数据存在背景噪声,将灰度值低于该阈值的体素不透明度设置为0,灰度值大于最大灰度值和阈值的差的体素不透明度设置为1,中间部分不透明度正比于灰度值,在二维切片中,灰度值越高代表该处组织的回声越强,在三维图中,用不透明度和亮度来代表组织的回声特性,因而颜色传递函数中R、G、B三个颜色通道传递函数见图7。
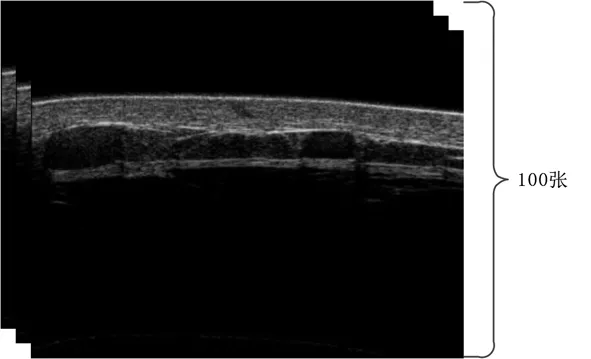
图4前臂上侧皮肤切片图像
Fig4Sliceimagesoftheupperforearmskin

图5超声体模实物图
Fig5Therealultrasonicphantomimages
4 结果
100张切片重建使用时间为1.1 s。超声体模三维成像结果见图8(a),从图中可以看到三维重建的图像很好的保持了体模的圆柱形状特征。图8(b)为体模三维重建之后的y-z截面图,测量切面中圆的直径和实物圆直径相比较,最大测量误差为0.1 mm。
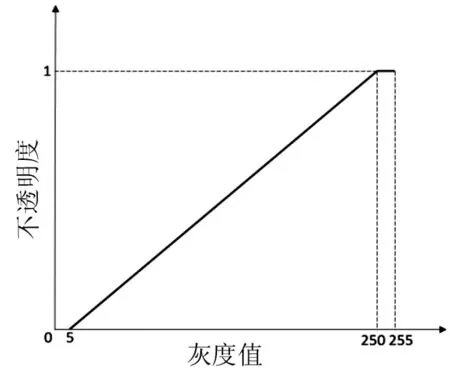
图6 不透明度传递函数Fig 6 Opacity transfer function

图7颜色传递函数
Fig7Colortransferfunction

(a)

(b)图8 (a).超声体模三维重建图;(b).超声体模y-z切面图Fig 8 (a).The three-dimensional reconstruction of phantom;(b).The y-z section of phantom
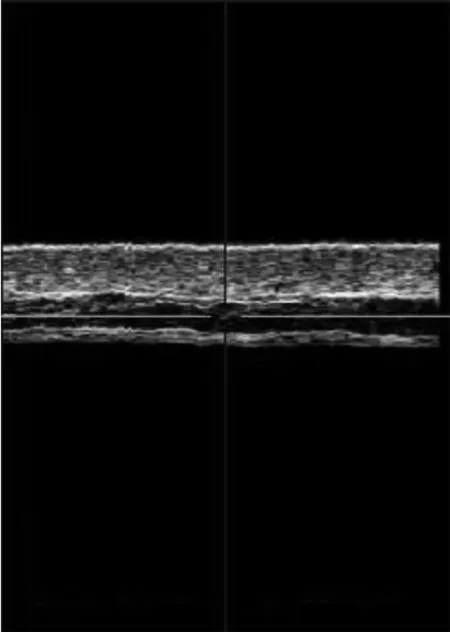
志愿者前臂上侧皮肤三维重建结果见图9(a),从图中可以清晰的看到皮肤的三层结构,最上面的表皮层亮度最高,因为表皮层中大量的角蛋白具有强回声特性,三维重建的表皮不平整,这是因为机械探头扫查时本身具有一定机械振动以及人体内部组织或者自身的运动导致获取的二维切片存在一定的错位,图9(b)为经过3x3x3三维中值滤波后的重建图,滤波之后重建的表面平滑了很多,噪声产生的伪影也少了很多,但是由于三维数据十分庞大,中值滤波显著增加了重建的运算量,中值滤波后重建所用时间为15.3 s。表皮下方的真皮层亮度稍暗,其回声特性主要取决于真皮内纤维,图9(c)为图9(a)中真皮层放大图,图中大量分布的片状和短线状结构为真皮内的纤维组织,在二维切片中无法看到真皮纤维的具体形态。通过观察三维真皮纤维的形态和分布,有助于诊断一些胶原疾病。皮下组织则表现为大部分区域亮度较低,局部区域出现亮度较高的膜样结构,这是因为皮下组织大部分为低回声特性的脂肪,夹杂着少量强回声特性的纤维,此外三维图中还能直观的看到组织中的血管,有助于对肿瘤进行更加准确的诊断,图9(a)中管状无回声区域为皮下静脉,但是三维图中无法看到血管的走向,图10(a)、(b)、(c)分别为三维视图中蓝色、红色、绿色平面所在位置的切面图,从x-y切面中可以看到血管的位置和形状,从y-z切面中可以看到血管的走向以及血管内的红细胞散射,实现了和传统二维超声C型扫描类似的功能。

(a)

(b)

(c)
图9皮肤三维重建结果(a).GPU光线投射法三维重建图;(b).3x3x3三维中值滤波后的重建图;(c).真皮层放大图;缩写:e为表皮层,d为真皮层,st为皮下组织,v为血管
Fig9Thethree-dimensionalreconstructionofhumanskin
(a).Three-dimensionalimagereconstructedbyragcastingbasedonGPU;(b).Thereconstructedimagefilteredbya3x3x3kernel;(c).Magnifiedimageofdermis;Abbreviation:e,indicatesepidermis;d,dermis;st,subcutaneoustissue;v,vain

(a)
(b)

(c)
图10切面图(a).x-y切面;(b).x-z切面;(c).y-z切面;缩写:e为表皮层,d为真皮层,st为皮下组织,v为血管
Fig10Thecross-sectionalimages(a).x-ysection;(b).x-zsection;(c).y-zsection;Abbreviation:e,indicatesepidermis;d,dermis;st,subcutaneoustissue;v,vain
5 结论
甚高频超声皮肤三维成像技术比传统的磁共振、CT三维成像精度高,探测深度比共聚焦显微镜和OCT深,可以在保证深度和精度的情况下获得皮肤的解剖结构图,非常适合于皮肤等浅表器官的三维成像,对于皮肤等浅表器官的手术指导具有重要意义,但是在精度如此高的情况下,人体组织运动或者机械振动引起的切片错位将严重影响三维重建效果,因此对错位的切片进行配准以及设计更高精度的三维探头有待进一步研究,而且三维成像数据运算量大,如何提高三维成像速度仍然需要进一步研究。
猜你喜欢
科教导刊·电子版(2022年5期)2022-03-19
辐射防护(2020年6期)2021-01-28
软件(2020年3期)2020-04-20
中国医学装备(2018年12期)2019-01-03
测控技术(2018年7期)2018-12-09
光学精密工程(2016年6期)2016-11-07
光学精密工程(2016年4期)2016-11-07
癌症进展(2016年9期)2016-08-22
腹腔镜外科杂志(2016年12期)2016-06-01
中国测试(2016年12期)2016-02-07