
工业机器人工具坐标系建立的教学策略浅谈
2019-01-21 05:40陈欣欣
福建轻纺 2019年1期
陈欣欣
(集美工业学校,福建 厦门 361022)
1 教学背景分析
随着生活水平的提高,人们对自己工作的环境也提出了新的要求,在艰苦枯燥而危险的工作岗位上,工业机器人开始逐步取代人工。2018年全世界约1/3的机器人正在销往中国,未来5-10年,机器人是一个见不到天花板的行业。李克强总理也应势提出中国版工业4.0规划——“中国制造2025”。作为自动化技术的集大成者,机器人是工业4.0最主要的基础设施之一。这使我们共同面对的一个挑战:工业机器人自动化应用人才在中国全面紧缺。我国工业机器人应用人才缺口达到20万,并且还在以每年20%-30%的速度持续递增。在此时代背景下,作为教学对象的中职二年级学生多数对于工业机器人专业和其今后的职业大环境了解不够全面,不知如何促进自己专业技能水平的提高以适应未来职业需求。
当今从中学生乃至全国的大学生,他们的技术教育受益于多种信息化教学方式。这些信息化教学方式大多基于机械工程、应用数学、材料加工、基础电子学、机器人学、工业制造等实践经验。本文采用仿真软件RobotStudio辅助教学。值得指出的是,除了基本知识点的仿真练习,掌握RobotStudio软件的离线编程技能更是对今后工业生产实践有极大帮助。
RobotStudio是ABB公司开发的优质离线编程软件,在教学实施过程中,通过构建机器人焊接工作站,对机器人进行编程,通过可视化的方法突破教学难点。以此为基础,利用职业学校学生思维活跃,动手能力强,好奇心强的特点,为信息化手段的教学实施提供了很好的前提条件。
2 工业机器人上创建工具坐标系教学情况分析
2.1 工业机器人简介
国际上工业机器人被定义为:“一种自动定位控制,可重复编程、多功能的、多自由度的操作机。”根据机器人的运动形态,工业机器人可以分为直角坐标型工业机器人、圆柱坐标型工业机器人、球坐标型工业机器人、多关节型工业机器人、平面关节型工业机器人和并联型工业机器人。笔者认为要使这些不同种类的机器人顺利运行最基本要求之一,就是正确建立工业机器人的工具坐标系。
2.2 工具坐标系的教学过程分析
机器人工具坐标TOOLDATA是指用于描述安装在机器人第六轴上的工具的TCP(tool center point)、重量、重心等参数的数据。在机器人执行程序时,本质上就是将TCP移至编程位置,而程序中描述的位置和速度,就是TCP点在对应工具坐标中的位置和速度。
从以上论述可以看出,工业机器人工具坐标系的概念抽象晦涩。中职学生数学基础较为薄弱,工具坐标系的概念对于学生而言,仅仅凭借数学推导或坐标系变换是难以学习理解的。与之相矛盾的是,在今后学习机器人编程时,很多情况下建立机器人运行轨迹,本质上就是在工具坐标系中创建目标和路径。
3 机器人工具坐标系建立的教学策略
针对以上教学面对的重点难点问题,以下重点就建立工具坐标系两大教学策略进行分析。
⑴ 化繁为简,归纳总结,将理论性极强的概念简化为工程操作步骤。
这样便于学生理解,操作简单易学。学生可以根据总结出来的工程式操作步骤自己动手探究,为后续任务布置以及在RobotStudio仿真实现打下基础。例如,在讲解机器人的工具坐标系时,将上文工具坐标系理论性概念描述为以下工程操作步骤,如下图1所示。

图1 TCP设定姿态示意图
首先在机器人工作站合适的范围内找一不可移动的尖点作为参考点;接着在安装的工具上另找一个尖点;然后调整至手动模式操纵机器人,移动工具上的参考点至少以4种不同的姿态尽可能与固定点刚好碰上;最后机器人通过计算这4个点的位置数据,并保存在TOOLDATA程序数据中,等待被程序调用。采用简化的工程式步骤描述层次分明,直接简要地指出工具坐标的定义及其建立过程,学生学习效果好。
⑵ 采用任务教学法,设置一个具体的工程任务,例如在点焊工作站中建立工具坐标系,这样可以使学生对于工具坐标的理解和应用更深入,驱动学生自主学习,培养学生发现问题解决问题的能力。在信息化软件中设计具体工程任务,再次将抽象的概念形象化,便于学生理解。
教学中设置的任务是在点焊工作站完成焊接工业机器人工具坐标系的建立。点焊在实际生产中有广泛应用,工业机器人进行白车身点焊,可以很大程度提高汽车生产线的产能、提高车身强度、降低不良率。工作站利用IRB6640机器人对汽车白车身进行点焊操作,点焊工作站如图2所示。
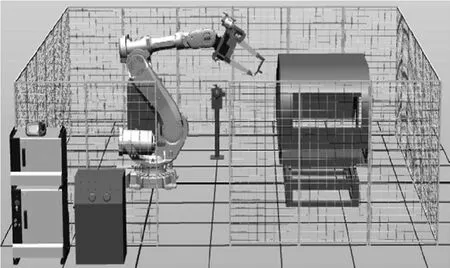
图2 信息化平台上的IRB6640机器人点焊工作站
在RobotStudio平台,学生采用以下步骤建立工业机器人的工具坐标系。
(a)ABB菜单-手动操纵-工具坐标-新建tool1设定属性后确定-“编辑”菜单“定义”-选择TCP和Z、X,点数6-选择合适的手动操纵模式,如图3所示。

图3 六点法建立工具坐标系
(b)操纵机器人工具参考点以不同的姿态靠近固定点,并示教器面板上依次操作“修改位置”按钮。
(c)完成,对误差进行确认。“编辑”菜单“更改值”,设定重量mass和重心cog数据。
(d)选择重定位模式,坐标系选工具,工具坐标选tool1,操作机器人验证工具坐标的精确程度。
教学过程中采用RobotStudio软件,能将抽象的概念形象化。许多晦涩的坐标系建立问题借助该平台软件的演示和仿真也变得直观、形象易于理解,大大的激发学生的学习兴趣,提高教学的效果与效率。建立工具坐标系tServoGun如下图4所示。
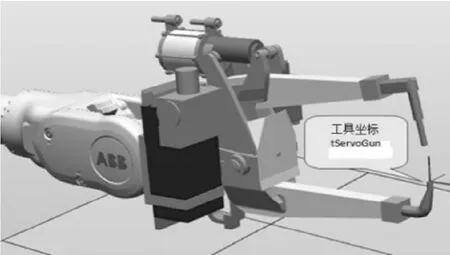
图4 工具坐标系tServoGun
学生成功完成了在点焊工作站的机器人上正确建立了工具坐标系的任务,如图5所示。在学生完成任务的过程中,笔者注意记录对每位学生的过程性评价。这样,通过信息化辅助教学,多种手段,层层推进教学重难点;通过练习拓展,循序渐进,培养了学生自主学习和实际解决问题的能力。

图5 点焊作业
在任务实施过程中,有几个方面值得注意:
⑴ 在了解点焊系统配置与功能的基础上完成任务。完成任务的过程中,学生需要自主调查,查找点焊作业的资料,这个过程可以引导学生进行观察,培养学习兴趣。
⑵ 采用上文中所介绍的工程步骤,在点焊焊枪上学习建立工具坐标系。将理论知识用在工业生产中,加深对知识的理解与应用。
课堂中设置的教学任务的主要目标是让学生学习正确建立工具坐标系,并将其应用于仿真工业生产实践。随着任务的实施,使学生可以系统地解决建立工具坐标系中的难点问题。在完成任务的过程中,需要自主调查、查找资料。积极的学生反馈和学生学业成绩表明,工程仿真原型的加入对学生学业成绩有显著有效的影响。
猜你喜欢
今日农业(2022年16期)2022-11-09
汽车实用技术(2022年5期)2022-04-02
电脑报(2020年32期)2020-09-06
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
中等数学(2017年2期)2017-06-01
——《行政科学论坛》杂志工作站挂牌运行
行政科学论坛(2016年7期)2016-10-25
焊接(2016年5期)2016-02-27
焊接(2015年6期)2015-07-18
焊接(2015年8期)2015-07-18
