基于二维资源管理的多功能雷达任务调度算法
2019-01-18 12:04田泰方张群陈怡君孟迪何其芳
航空学报 2018年12期
田泰方,张群,*,陈怡君,孟迪,何其芳
1. 空军工程大学 信息与导航学院,西安 710077 2. 武警工程大学 信息工程学院,西安 710086 3. 中国人民解放军93303部队,沈阳 110043 4. 中国人民解放军93534部队,天津 301700
相控阵雷达具有波束无惯性快速扫描与雷达资源灵活分配的特点,能够在空域搜索的同时,执行多目标跟踪、成像等多种工作方式[1-3],设计合理有效的资源管理与任务调度算法是充分发挥相控阵雷达技术优势的关键所在[4-6]。
当前的相控阵雷达资源管理与任务调度研究领域,基于单一孔径条件下的时间资源优化分配与调度算法,取得了较多的研究成果。然而现有文献中,面向雷达孔径资源分配与调度问题的研究仍然较少,文献[7]指出,为了满足多功能一体化电子系统的需要,雷达系统可将完整的相控阵天线阵面划分为几个小孔径,例如美国海军实验室于1996年文献启动的先进多功能射频概念(AMRFC)计划。在该方案中,天线阵元是相互独立的,并且其功能可以随着时间灵活切换,因此多种任务可以分时共用同一个相控阵天线阵面[8-10]。与以往在单一孔径下进行时间资源分配的调度算法不同,此时需要同时考虑时间资源和孔径资源两个维度下的任务分配问题。文献[11-12]提出按照阵面百分比的形式为雷达任务动态分配孔径资源;文献[13]按照目标距离远近确定对孔径资源的占用情况,并在此基础上提出了一种波束波形联合调度算法。
目标成像作为相控阵雷达的重要功能之一,可以为目标的分类与识别提供可靠依据[14-15]。将成像任务与搜索、跟踪任务一同考虑进雷达资源调度策略设计中,能够进一步发挥相控阵雷达多任务协同的优势[16]。现有的多功能雷达在执行目标成像任务时,需要分出固定一部分时间资源,导致工作效率不高。在基于压缩感知的稀疏逆合成孔径雷达(ISAR)成像技术下,对目标的连续时间观测可以替代为一个时间段内的随机稀疏观测,这就在雷达资源调度算法中为成像任务提供了设计上的灵活性。文献[17]提出了一种基于稀疏孔径ISAR成像的雷达资源调度算法,显著提高了雷达执行成像任务时的工作效率。
本文在相控阵雷达动态孔径分割技术的基础上,提出了一种基于时间-孔径二维资源管理的多功能雷达任务调度算法,并结合基于压缩感知理论的稀疏ISAR成像技术,将成像任务与搜索、跟踪任务一同充分考虑到资源调度模型中,仿真结果验证了算法的有效性。
1 基于压缩感知的稀疏孔径ISAR成像
建立合理的成像任务资源调度模型,需要依据基于压缩感知的稀疏ISAR成像技术来确定对目标成像所需要的雷达资源。传统的ISAR成像算法需要占据雷达工作时间中一段较长且连续的时间资源,这与多功能雷达执行大量目标搜索与跟踪任务同时高实时性成像的需求相冲突。而基于压缩感知理论的稀疏ISAR成像技术,可以将传统成像算法对目标进行连续时间观测,转化为一个时间段内的稀疏随机观测,显著节省了成像任务对雷达时间资源的占用,从而为将成像任务纳入到多功能雷达资源调度模型中提供了有效支撑。
在ISAR成像技术框架下[18],设雷达对某个目标k所需的成像积累时间为Tck,脉冲重复频率为PRF,雷达共对该目标发射Nk=PRF·Tck个线性调频(LFM)信号,回波信号序列为
sr(t,m)m=1,2,…,Nk
(1)
对于目标散射点模型来说,回波信号经过傅里叶变换后具有稀疏性。根据压缩感知理论,选择傅里叶变换矩阵作为稀疏变换矩阵Ψ,设计一个Mk×Nk维的随机部分单位矩阵Φ作为观测矩阵,该矩阵中各元素为

(2)
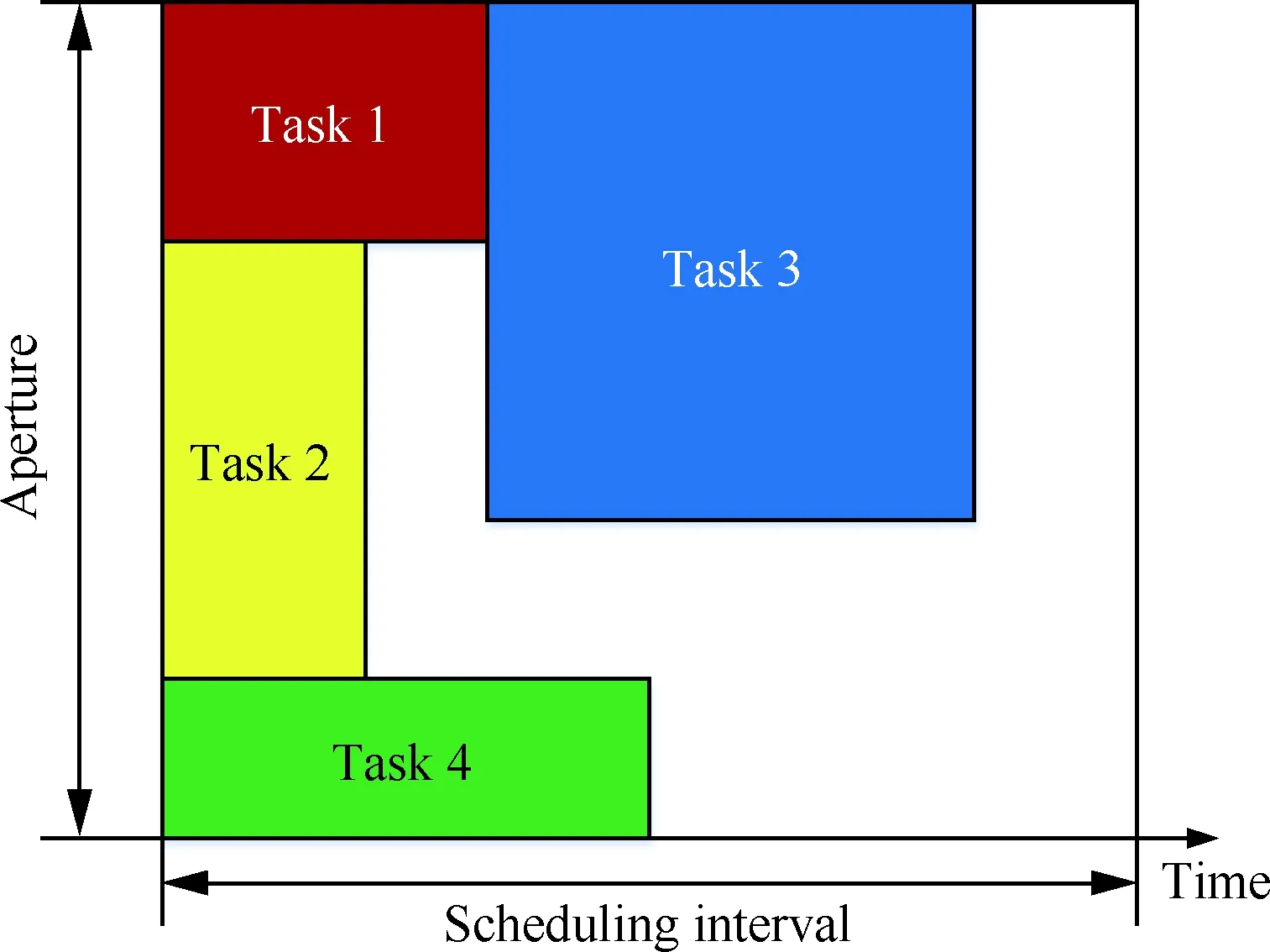
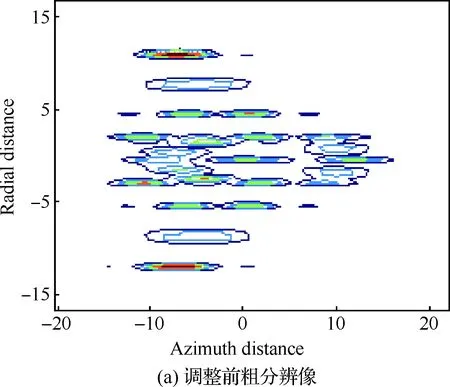
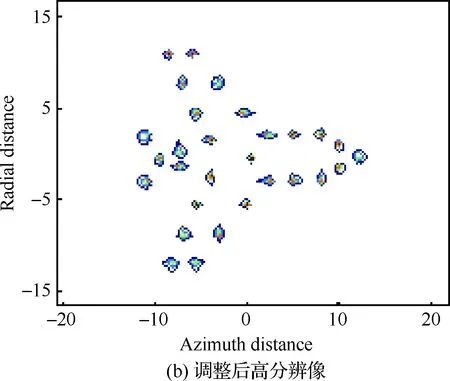
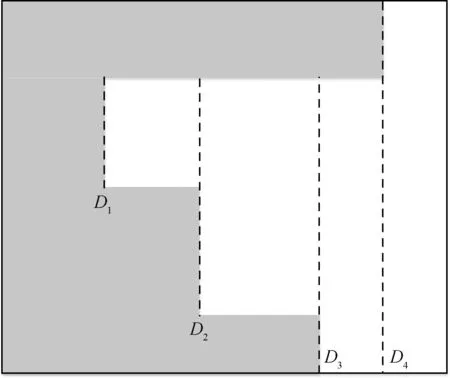
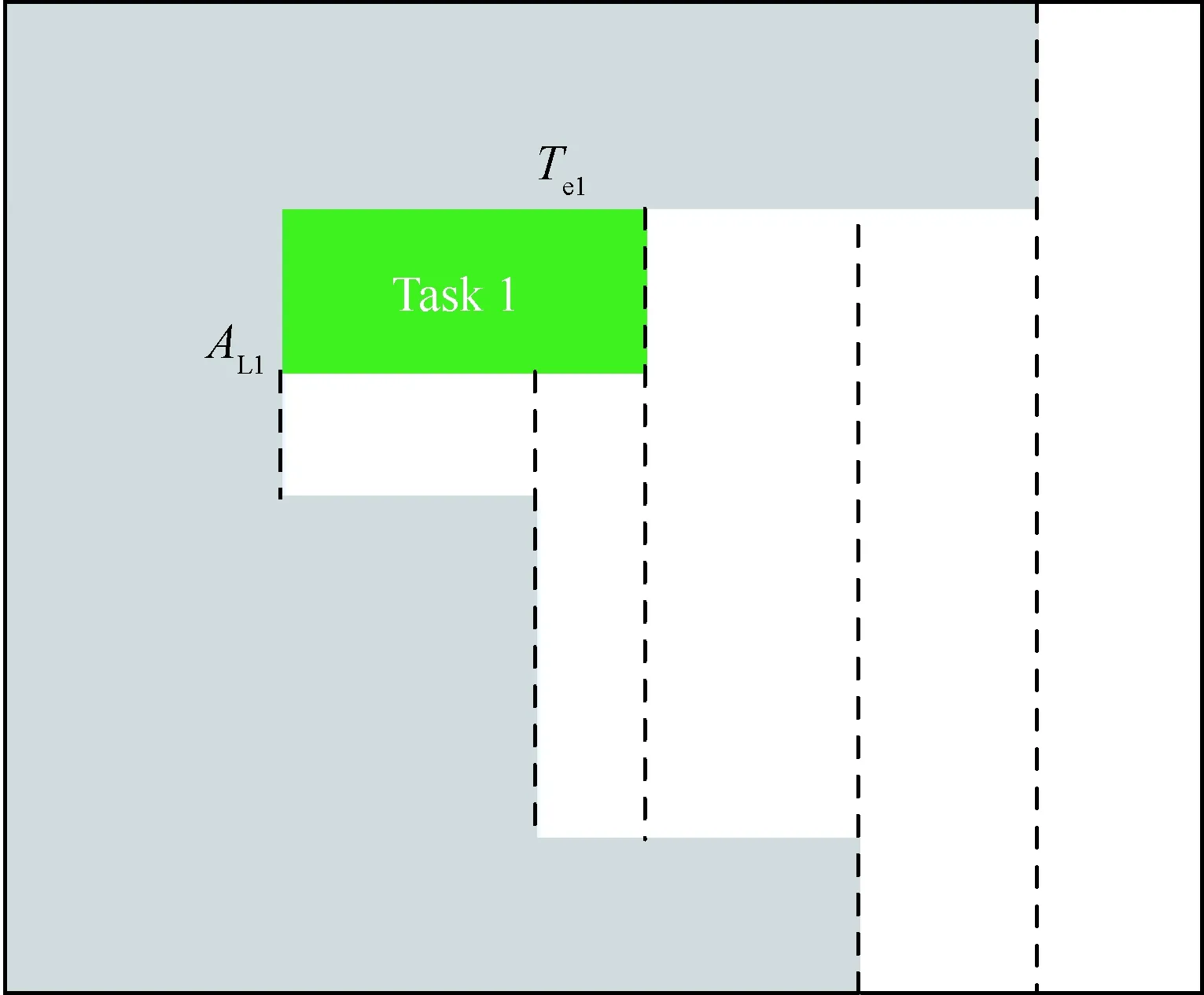
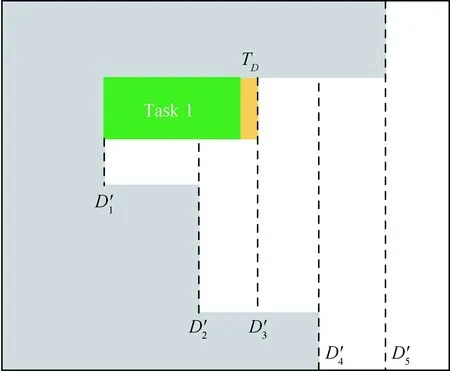
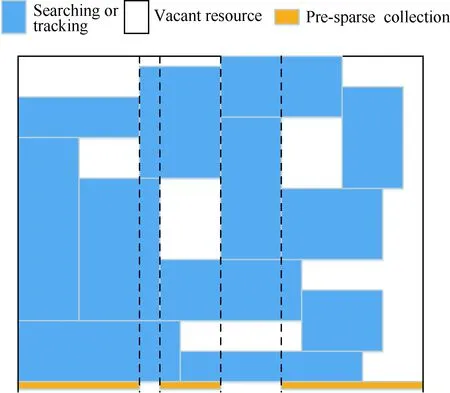
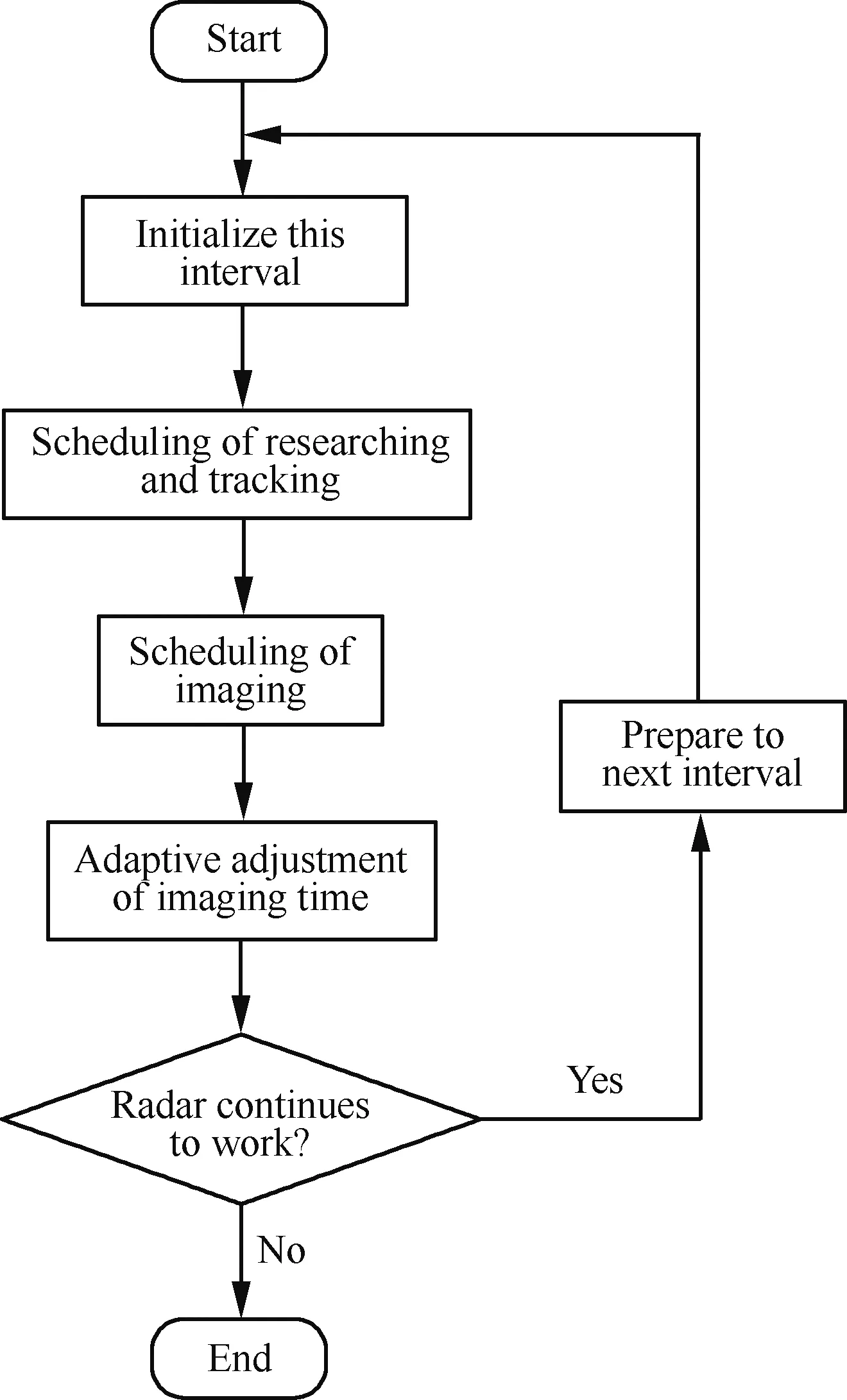
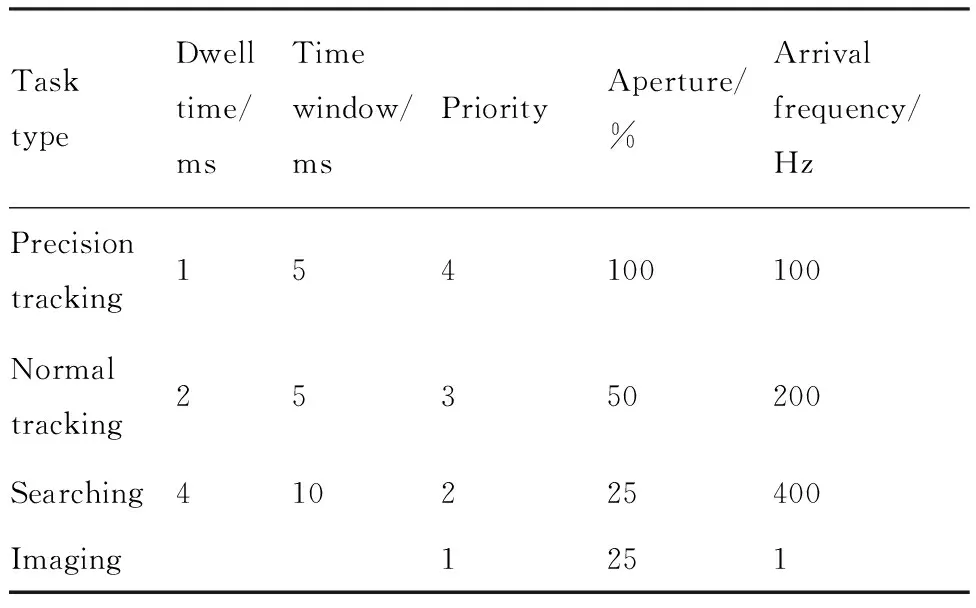
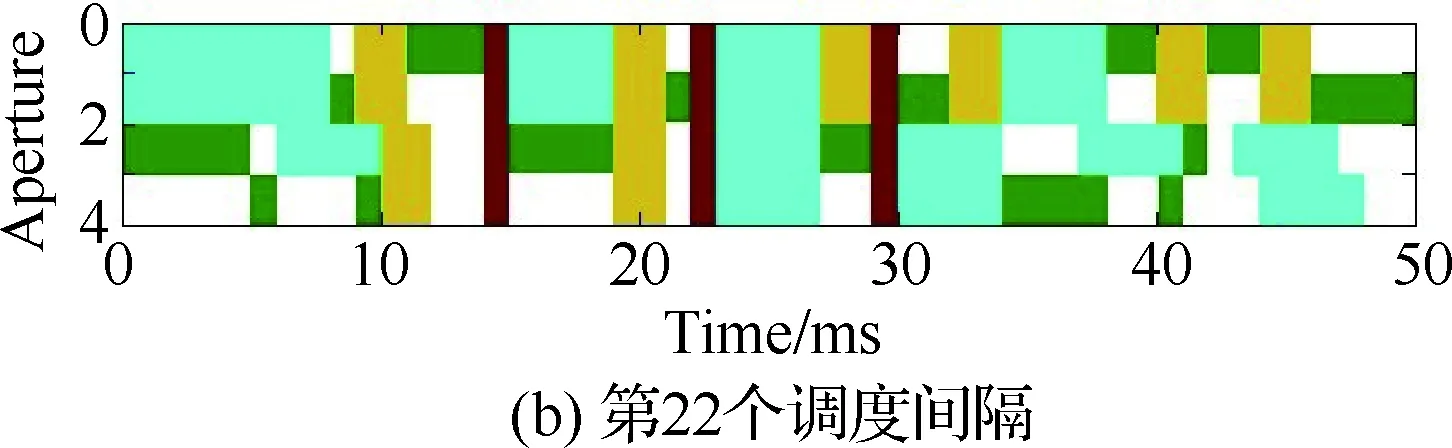
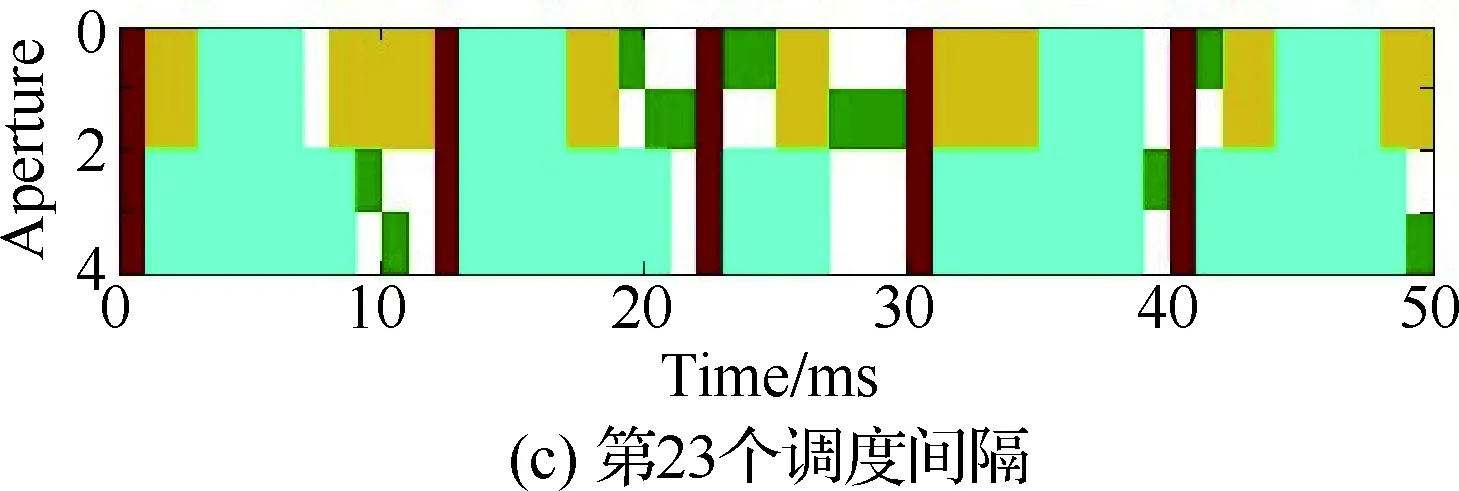
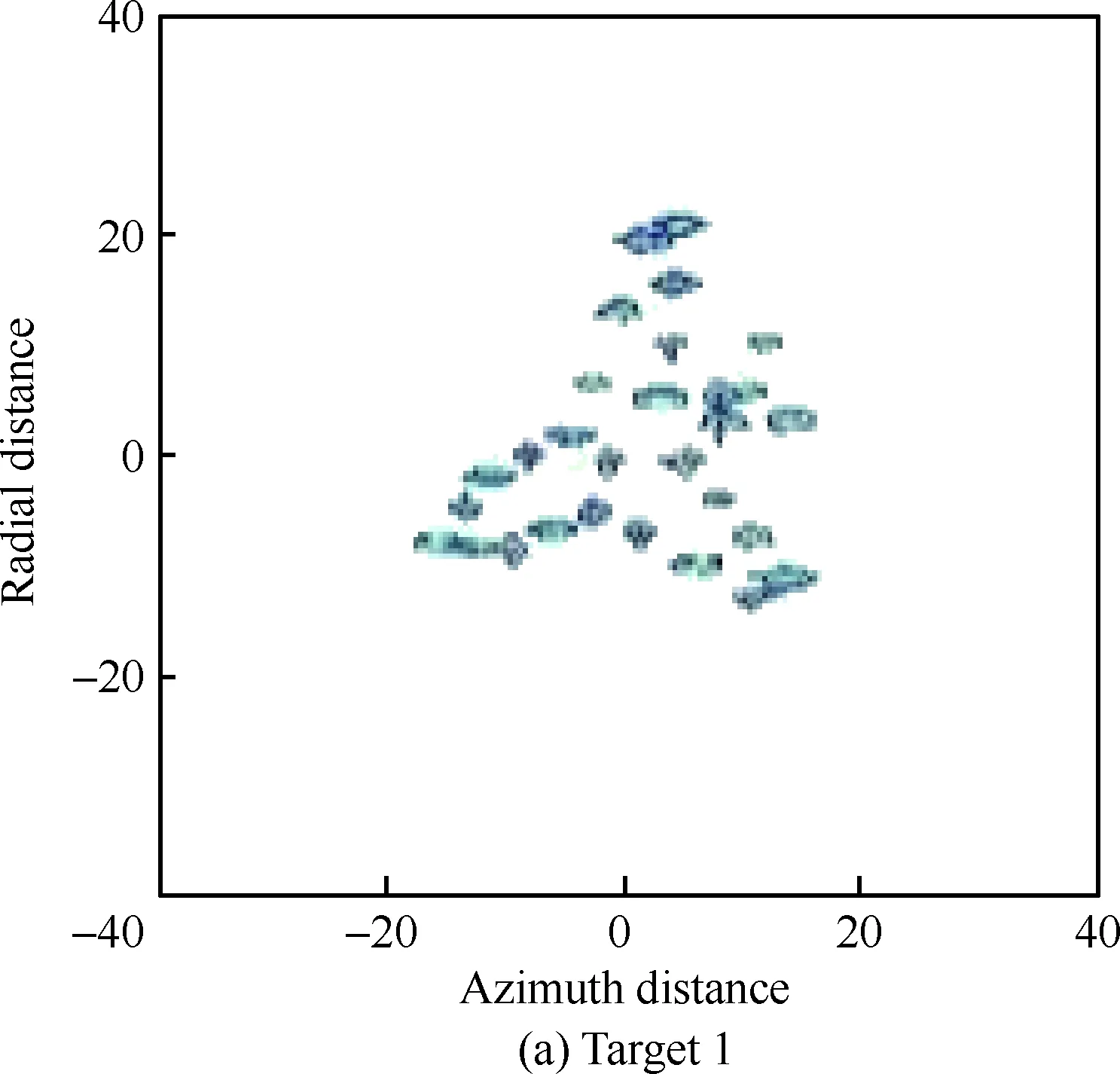
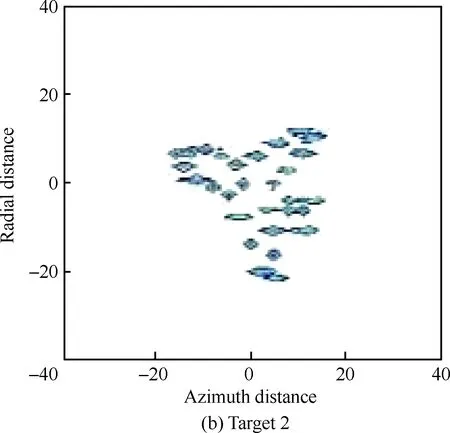
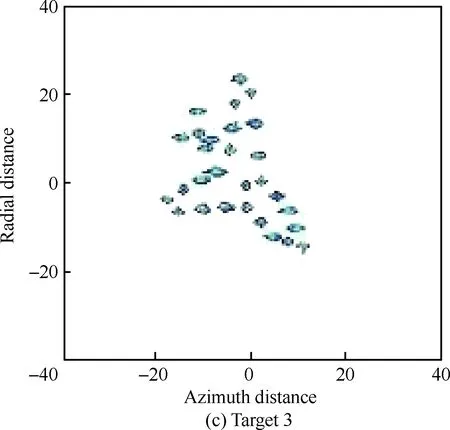
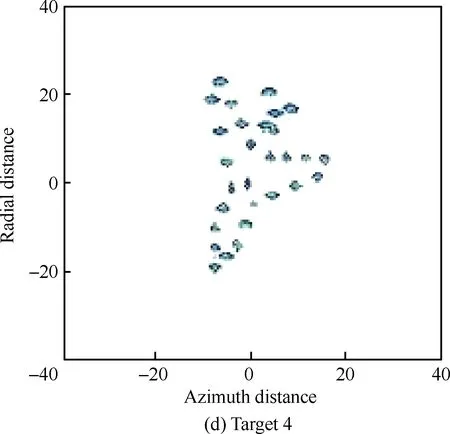
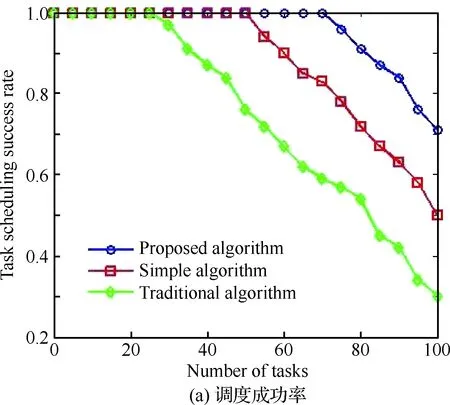
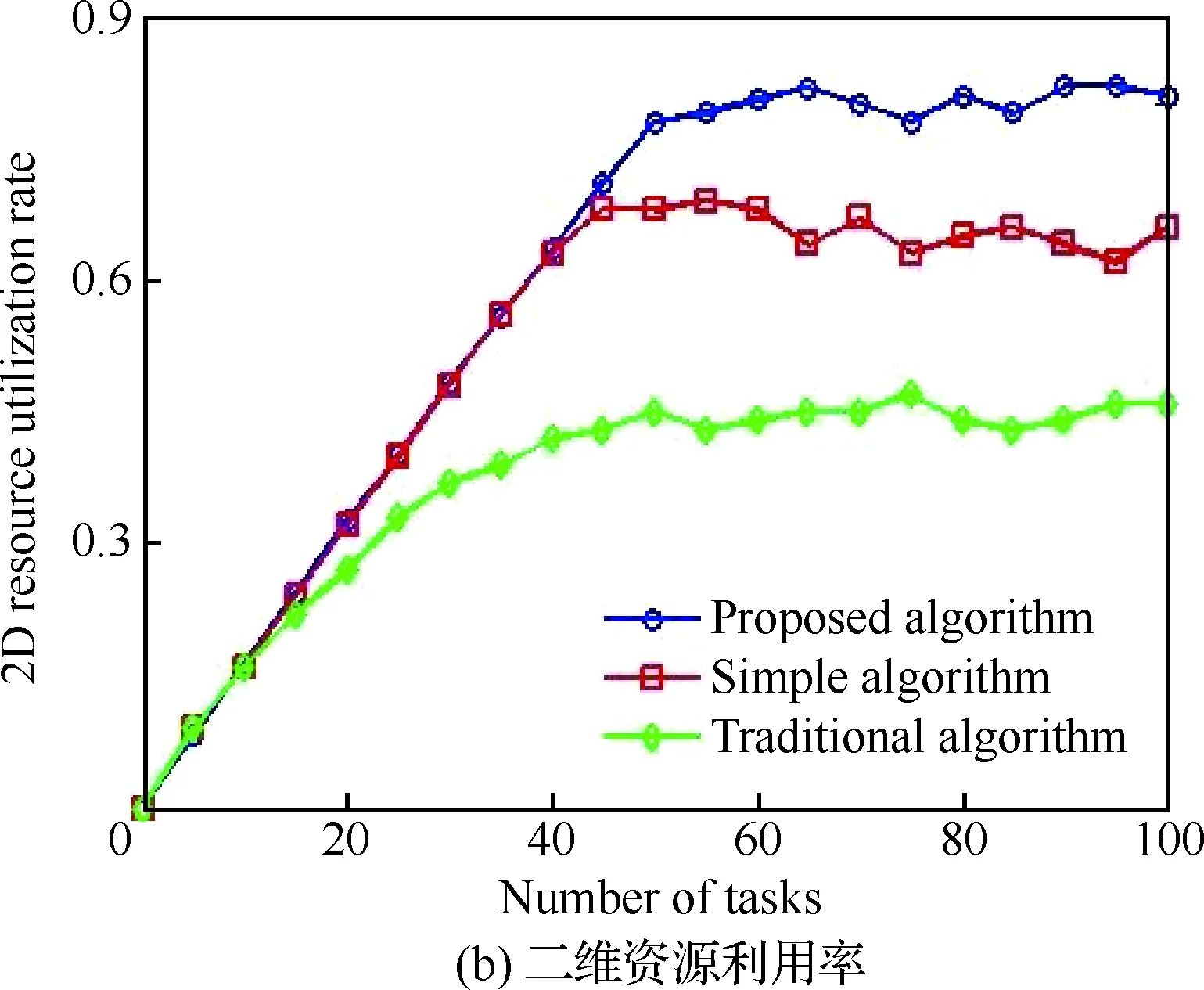
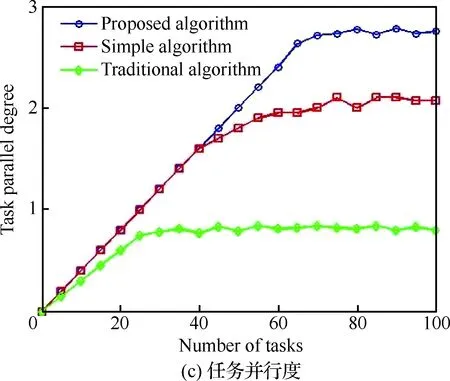
在雷达工作状态上等价于,对某目标观测的全时间段Tck内,仅随机发射脉冲数Mk(Mk sr(t,m′)m′=1,2,…,Mk (3) 式中:Mk的值由目标k的稀疏度Kk决定,满足 Mk≥cKklnNk (4) 式中:c为恢复精度常数,取值为1,可以满足稀疏信号高概率重构的要求,最终得到目标二维高精度ISAR像。 需要指出,稀疏孔径下目标距离像的相关性严重减弱,此时在对ISAR回波进行平动补偿时,采用一种基于最大似然估计(ML)算法的相位误差估计。该算法是对所有回波信号综合处理的结果,单个孔径数据的缺失对相位补偿的结果影响较小[16]。 在多任务执行能力的角度下,单位时间内相控阵雷达能够完成的任务数量是有限的。传统的相控阵雷达一维时间资源调度问题就是关于如何在单个调度时间间隔内提高多任务执行能力的方法措施,图1为多功能雷达一维时间资源下的任务分配示意图。 而在阵面孔径动态分割条件下,涉及到的雷达资源便从时间一维扩展到时间-孔径二维,在时间-孔径二维资源下的雷达任务资源分配示意图如图2所示。 定义二维资源矩阵RA×NT=[ra,n],其中a=1,2,…,A;n=1,2,…,NT。在孔径资源维度上,A表示孔径资源总个数,为离散值;在时间资源维度上,雷达从时间t0开始工作,调度间隔为ΔT,故雷达工作时间为[t0,t0+ΔT],设雷达脉冲重复频率为PRF,则一个调度间隔内的离散时间序列长度NT=PRF·ΔT;资源矩阵中的元素ra,n的取值为1或0,表示对应的雷达资源被占用与否。 图1 雷达一维资源任务分配示意图Fig.1 Sketch of task allocation of 1D radar resources 图2 雷达二维资源任务分配示意图Fig.2 Sketch of task allocation of 2D radar resources 目标搜索与目标跟踪是相控阵雷达的常规任务,从资源管理的角度看,这两大类任务可以用数学模型统一描述为 Taskk={tak,tsk,Twk,Tek,ak,ALk,pk} (5) 式中:tak为任务到来时刻;Twk为任务时间窗;tsk为任务实际执行时刻;Tek为任务执行时间;ak为占用孔径资源起始位置;ALk为占用孔径资源大小;pk为任务优先级。 传统的雷达资源调度策略面对成像任务请求时,将其同搜索、跟踪任务一样,在调度程序中生成统一的任务模型加入到任务等待队列中。而往往成像任务占用的时间资源较多但其执行优先级相对较低,造成成像实时性差的情况。为了改善这一缺陷,通常做法是雷达调度程序分出固定一段时间给成像任务,降低了工作效率。 在基于压缩感知理论的稀疏孔径ISAR成像技术支撑下,传统成像任务所需的较长且连续时间资源可以被较长时间段内随机稀疏时间资源所替代[19]。考虑到实际中被调度执行的多个搜索与跟踪任务的执行时间之间,会有少量呈稀疏状分布的时间处于空闲状态,于是可以将其利用起来执行目标成像稀疏观测,如图3所示,从而提高雷达工作效率。 与搜索、跟踪任务有所不同,稀疏孔径下的ISAR成像任务模型为 图3 稀疏ISAR成像技术下雷达多任务调度示意图Fig.3 Sketch of radar multitask scheduling under sparse ISAR imaging Taskk′={tak,Twk,Tck,Mk,Ak,pk} (6) 式中:Tck为方位向积累时间;Ak为占用孔径资源大小;Mk为经过降维处理后的方位向观测维度。 成像任务模型中,方位向积累时间Tck决定了目标的方位向分辨率,积累时间越长成像效果越好[14]。并且由式(4)可知,方位向观测维度Mk的值与Tck正相关。在保证雷达执行搜索任务以及尽可能多执行目标跟踪任务的前提下,考虑目标成像实时性的要求,在此为成像任务的方位向积累时间设计如下自适应调整策略: 1) 在每一个雷达调度时间间隔内,利用雷达调度常规任务后所剩余的雷达资源来执行稀疏ISAR成像任务。 2) 选取相邻两个调度间隔结束后得到的目标ISAR像,计算出两者的互相关系数,并设定一个合适的阈值。 3) 若计算出的互相关系数小于阈值,说明当前该目标的ISAR像不确定性高,成像质量还有很大提升空间,故在下一个雷达调度间隔内继续对其进行稀疏观测。 4) 若计算出的互相关系数大于阈值,说明继续观测该目标已很难显著提高成像质量,故设定该目标成像任务执行完毕。 图4为执行成像积累时间自适应调整策略的效果,目标的成像结果由图4(a)中的粗分辨像提高到了图4(b)中的高分辨像。 图4 成像积累时间调整效果图Fig.4 Result of adjustment of imaging accumulation time 相控阵雷达高效率的密集执行各种任务,必然伴随雷达阵面长期处于高负荷发射状态,如果不加以限制容易导致阵面天线因持续过热工作而损坏,因此需要引入雷达能量资源的概念。雷达能量资源并不像时间资源与孔径资源一样,直接参与不同雷达任务的资源分配中,而是在设计调度算法时作为一种约束条件加以考虑[20]。 二维资源矩阵RA×NT中的每一个行向量Ra代表阵面中子孔径a在所有时刻下的工作状态,则每一时刻下的瞬态能量为 (7) 式中:τ为散热参数,表示雷达阵面散热性能的强弱。由此设定一个阈值Emax,定义雷达能量资源约束条件为任一子孔径在任意时刻下的瞬态能量不能大于该阈值,即 E(a,n) (8) 当前相控阵雷达资源调度算法主要分为模板算法和自适应调度算法,其中后者能够满足在多目标复杂环境下进一步提高雷达调度算法灵活性的需求。自适应调度算法的基本设计思路,首先是在雷达持续工作状态下设定一个调度时间间隔,之后在每个调度间隔内,雷达控制器根据任务优先级及各种资源约束决定接受、拒绝或延迟被选雷达任务。因此在建立雷达资源调度模型前,还要定义以下概念: 1) 执行任务队列Le={Taskke},表示经过雷达控制器的调度,即将在下一个调度间隔内执行所有任务的集合,其中ke为将在下一个调度间隔内执行的任务编号。 2) 等待任务队列Lw={Taskkw},表示已经到来但等待在下一个调度间隔中被执行的所有任务的集合,其中kw为已经到来但等待在下一个调度间隔内执行的任务编号。 3) 删除任务队列Ld={Taskkd},表示截至最后执行时间仍然还没有执行的所有任务的集合,这些雷达任务已经失效,其中kd为被删除的任务编号。 设计自适应调度算法的目的为使每个调度间隔内的时间-孔径二维资源利用率达到最大,因此在以上定义的基础上建立如下任务调度模型,即 (9) 式中:K1为该调度间隔内执行任务队列中常规任务的个数;K2为成像任务的个数,约束条件式(10a) 和式(10b)给出了所有搜索与跟踪任务在当前调度间隔内被执行需满足的时间资源、孔径资源约束,其中An表示在离散时刻n处被占用的孔径资源总数;条件式(10c)给出每个子孔径在整个调度间隔内应满足的能量资源约束;条件式(10d)规定所有搜索、跟踪任务被调度执行后在二维资源矩阵中不能发生冲突;条件式(10e)表示调度完搜索与跟踪任务后,将剩余的雷达资源分配给成像任务进行稀疏观测时,应当满足时间资源占用总数不大于一个调度时间间隔。 对式(9)的求解即为该资源调度问题的最佳调度方案,这种非线性规划问题(Nonlinear Programming, N-P)难以从数学推导中得到最优解。因此结合时间-孔径二维资源自适应调度的实际物理意义,这里给出一种启发式算法来得到次优解。 在一维时间资源调度问题中,存在一种时间指针算法,该算法的思想是从任务等待队列中选择最合适的任务,安排到当前时间指针指向的时刻执行,之后更新时间指针,直至遍历整个调度间隔,尽可能地为更多任务分配雷达资源。在时间-孔径二维资源调度问题中,考虑到其调度本质也是要区分不同任务在时间上先后执行的顺序,由此类比引入“时间线集合”的概念。 雷达二维资源调度问题可以被直观地视为几何矩形件堆积填充的过程。Task 1分配资源前的资源矩阵状态示意图如图5所示,左边深色部分表示已被占用的雷达资源,右边浅色部分表示空闲未被占用的雷达资源,图中所有的虚线组成时间线集合,即 图5 Task 1分配资源前的资源矩阵状态示意图Fig.5 Sketch of state of resource matrix before allocating to Task 1 D={Dk=(dk,ask,aek)|k=1,2,3,4} (11) 式中:dk为该时间线的所在时刻;ask为起始孔径位置;aek为末端孔径位置。与时间指针的功能一样,时间线集合可以用来确定当前被调度雷达任务的最早执行时刻。 Task 1分配资源后资源矩阵状态示意图如图6 所示,此时按照优先级顺序为任务Task 1分配雷达资源,图中Task 1矩形块的宽与高分别对应任务执行时间Te1和占用孔径资源AL1。从该集合中的最早时间线开始,判断是否同时满足时间资源、孔径资源和两个约束条件: ta1≤dk≤ta1+Tw1≤dk+Te1<ΔT (12) AL1≤aek-ask (13) 若不能同时满足,则按时间顺序依次判断下一个时间线;若某个时间线满足所有约束,则确定Task 1在该时间线上开始执行,即 ts1=dk (14) 能量资源约束更新后资源矩阵状态示意图如图7所示,最后考虑式(10)中规定的能量资源约束。在Task 1被成功分配雷达资源后,需要根据下一个任务Task 2的执行时间Te2,来确定一个能量约束右移量 TD=minx s.t.E(ask,(dk+Te2+x)PRF)≤Emax (15) 最终的时间线集合更新结果为 图6 Task 1分配资源后资源矩阵状态示意图Fig.6 Sketch of state of resource matrix after allocating to Task 1 图7 能量资源约束更新后资源矩阵状态示意图Fig.7 Sketch of state of resource matrix after updating energy resource constraint { (d1,as1+AL1,ae1), (d2,as2+AL1,ae2), (d1+Te1+TD,as2,ae2), (d3,as3,ae3), (d4,as4,ae4)} (16) 以上时间线集合的更新过程与搜索、跟踪任务的调度同步进行,当一个调度间隔内因资源矩阵饱和而无法继续为等待队列中的剩余任务分配雷达资源时,雷达控制器开始进行成像任务的调度。 图8为调度完常规任务、并且考虑能量约束后的雷达资源状态示意图,可以利用这些零散分布的剩余资源来执行稀疏孔径ISAR成像任务,具体步骤如下: 步骤1执行2.3节所述的成像时间自适应调整策略,确定将要在本调度间隔内继续申请雷达资源的所有成像任务,并以优先级顺序排列。 步骤2选择当前优先级最高的成像任务,其孔径资源占用大小为Ak,遍历资源矩阵RA×NT中每一个离散时间位置n=1,2,…,NT处的孔径资源占用情况。 步骤3对于当前成像任务Task 1′,依次判断n时刻下是否存在连续分布且不小于A1的空闲孔径资源,将所有满足条件的离散时刻位置组成集合M1,作为预稀疏观测集合,如图9所示。 步骤4遍历M1中的每个离散时刻m,依次判断其中的空闲孔径资源是否满足式(10)规定的能量约束,若满足则确定Task 1′在该时间执行一次稀疏观测,更新RA×NT,如图10所示。 步骤5通过步骤4得到该调度间隔下Task1′执行实际稀疏观测的资源分配结果,返回步骤2,开始调度下一个成像任务,直到最终该调度间隔下成像任务调度执行结束。 图8 调度成像任务前资源矩阵状态示意图Fig.8 Sketch of state of resource matrix before scheduling imaging task 图9 确定预稀疏观测时间段集合示意图Fig.9 Sketch of determination of pre-sparse collection of observation time periods 图10 确定成像任务所占资源后资源矩阵状态示意图Fig.10 Sketch of state of resource matrix after determination of radar resources for imaging task 按照上述时间线集合的更新算法,结合之前成像任务的自适应调整策略,面向搜索、跟踪和成像任务的时间-孔径二维资源调度算法流程为: 步骤1初始化资源矩阵RA×NT=0、任务执行队列Le=∅和时间线集合D={(t0,A,0)}。 步骤2在某个调度间隔[t0,t0+ΔT]到来之前,考察等待任务队列Lw中的所有任务,将最晚执行时间tak+Twk 步骤3用3.1节所述算法将资源矩阵RA×NT依次分配给等待队列Lw中的任务,时间线集合D同步进行更新,所有成功调度的任务加入到执行队列Le,未成功调度的任务继续留在Lw中。 步骤4本调度间隔内搜索、跟踪任务调度完毕后,开始为成像任务分配雷达资源,根据稀疏孔径ISAR成像结果,运用2.3节所述算法判断是否继续成像。 步骤5本调度间隔完成,若雷达停止工作则结束,若继续工作则返回步骤1,为下一调度间隔做准备。 相应的算法流程图如图11所示。 图11 本文调度算法流程图Fig.11 Flow chart of proposed scheduling algorithm 仿真实验中模拟雷达执行搜索、普通跟踪、精密跟踪和ISAR成像4类任务,其中对于ISAR成像任务,为满足一定的高分辨率要求,设定雷达发射载频为10 GHz、带宽为300 MHz、脉冲重复频率(PRF)为1 000 Hz的LFM信号。上述4类任务各自的雷达资源参数如表1所示。 仿真中雷达调度间隔取为50 ms,总工作时长为10 s。图12为仿真得到的部分调度时序图,每幅图展示了某一调度间隔内二维雷达资源矩阵的详细分配情况。其中不同颜色的矩形块代表不同的任务类型,矩形块的位置包含了该任务占用的雷达二维资源信息。例如在第一个调度间隔内,雷达共执行了5次精密跟踪、10次普通跟踪以及22次搜索任务,同时将剩余雷达资源分配给成像Task 1来进行稀疏观测。 表1 任务类型及参数Table 1 Task types and parameters 从仿真运行结果上来看,在第22个调度间隔结束后,成像Task 1中相邻目标像的互相关系数大于阈值,故在第23个调度间隔内,雷达开始执行成像Task 2。最终在6 s的总仿真时间内,雷达共完成了4个目标的高分辨成像,这验证了本文中成像时间自适应调整策略的有效性,图13展示了这4个成像任务的最终ISAR成像结果。 为了验证本文算法的有效性,引入3个雷达调度算法的性能评价指标: 图12 部分调度间隔内资源矩阵分配示意图Fig.12 Sketch of resource matrix allocation in some scheduling intervals 图13 最终成像结果图Fig.13 Final results of imaging 1) 任务调度成功率(Task Scheduling Success Rate,TSR),定义为被成功调度的任务占所有申请雷达资源的任务的比值,表达式为 TSR=KS/KT (17) 式中:KS为被成功调度的任务个数;KT为所有申请雷达资源的任务总数。 2) 二维资源利用率(2D Resource Utilization Rate,RUR),定义每一个调度间隔内的二维资源矩阵中,非零元素所占百分比的平均数表达式为 (18) 3) 任务并行度(Task Parallel Degree,TPD),定义为平均每个时刻下同时占用孔径资源的任务个数,表达式为 (19) 式中:Kn为第n个时间位置时占用孔径资源的任务总数。 以上述3种性能指标作为标准,将本文算法与简单的分出固定成像时间的资源调度算法(简称简单算法)、以及传统的单一孔径下资源调度算法(简称传统算法)进行对比,结果如图14所示。图14(a)为不同任务数量下3种调度算法的调度成功率变化曲线,可以看出当任务数小于20时,系统资源相对充足。随着任务进一步增加到25、55左右时,传统算法、简单算法的调度成功率先后开始下降,而本文算法可以维持调度成功率为100%的状态直到任务数量增加到65后。这体现了本文算法相对于另外2种算法,能够使雷达面对大量任务时利用有限的雷达资源提高成功调度的任务数。图14(b)为不同任务数量下3种调度算法的二维资源利用率变化曲线,从曲线中可以看出,随着任务数量的不断增加,传统算法、简单算法的二维资源利用率将最终维持在45%、65%左右,而本文算法可以使雷达在饱和工作状态下的二维资源利用率达到80%的水平,优于另外2种算法。图14(c)为不同任务数量下3种调度算法的任务并行度变化曲线。该图表明,在任务数量达到25后,传统算法达到了任务并行度为0.8左右的性能瓶颈,简单算法在孔径动态分割技术的基础上,其性能瓶颈在推迟到任务数量增加为60后到来,维持在任务并行度为2左右。而本文算法又在稀疏孔径ISAR成像技术支撑下,将任务并行度的瓶颈值提高到了2.7左右。综上所述,本文提出的调度算法在3项性能指标上均存在一定优越性,提高了雷达执行多种任务的能力,并且这是在保证对目标成像能力的同时做到的。 图14 3种性能指标曲线图Fig.14 Curves of three performance indexes 基于动态孔径分割技术,面向多功能相控阵提出了一种时间-孔径二维资源调度算法。 1) 在稀疏孔径ISAR成像技术支撑下,雷达完成常规搜索与跟踪任务的同时,利用剩余资源对成像目标进行稀疏观测并最终重构出高分辨像。 2) 仿真实验表明了本文算法可以完成多种雷达任务的合理调度和实现目标的有效成像,并且验证了相比传统算法在一些调度性能指标上的优越性。2 时间-孔径二维资源调度模型
2.1 动态孔径分割下的雷达资源模型

2.2 多功能雷达任务模型

2.3 成像积累时间调整策略
2.4 能量资源约束
2.5 资源调度模型
3 调度算法求解
3.1 基于时间线集合的资源矩阵分配算法

3.2 成像任务调度算法

3.3 调度算法
4 仿真分析

5 结 论
猜你喜欢
中国交通信息化(2022年9期)2022-10-28农业工程学报(2022年10期)2022-08-22煤炭工程(2022年7期)2022-07-21北京航空航天大学学报(2021年6期)2021-07-20舰船电子对抗(2019年5期)2019-12-04北京航空航天大学学报(2019年9期)2019-10-26计算机测量与控制(2019年6期)2019-06-27小学生学习指导(低年级)(2019年3期)2019-04-22中国纤检(2018年8期)2018-09-07读写算·小学低年级(2014年4期)2014-07-24