高坝泄流诱发事故闸门的爬行振动研究
2019-01-15 08:47张金良练继建
水利学报 2018年12期
梁 超,张金良,练继建,刘 昉
(1.黄河勘测规划设计有限公司 博士后科研工作站,河南 郑州 450003;2.河海大学 水利水电学院,江苏 南京 210098;3.天津大学 水利工程仿真与安全国家重点实验室,天津 300350)
1 研究背景
我国水能资源多位于西部的高山峡谷地区,因此多数水利水电工程面临“高水头、大流量、高泄洪功率”的运行条件,高坝泄流诱发水工结构的振动安全问题十分突出[1]。其中,高坝泄流诱发水工闸门的不利振动由于其机制复杂、问题多发,是工程水力学领域的经典问题[2-16]。一般认为闸门的振动可能由以下机制导致,即:涡激振动[2-3]、流量脉动[4-5]、滚轮受力不均导致的颤振[6]、胸墙空腔激振[7]、参数共振[7]和空化振动[8]等。随着原型观测技术的进步,近年来相继发现了其它类型的闸门振动诱发机制。文献[13]根据原型观测资料,提出并阐明了高坝泄流诱发的闸门伴生振动机制;文献[14]通过引黄涵闸动力学原型试验,在水工闸门上观测到了爬行振动现象并进行了理论研究;文献[15]首次在特大型水利工程泄洪洞事故闸门高水头运行条件下观察到闸门无法关闭并伴随爬行振动的现象,并提出了减振措施。由于水流荷载特性[16-17],流固耦合作用机制[18],以及闸门复杂阻尼特性[19]等方面缺乏研究,实际中闸门无法正常使用并伴随强烈振动的案例时有发生[20]。文献[21]中将水工闸门的动力稳定和振动控制归纳为未来闸门研究聚焦的七大方向之一。
近几十年来,系统控制理论在航空航天、机器人及核动力等高新技术领域中得到了广泛的应用[22-23],并且逐渐扩展到生物、医学和交通等领域。但是在土木和水利等传统行业,应用系统控制理论的基本观点、理论体系和研究方法分析处理实际工程问题的研究还远远不够,而且在很多方面仍处于空白。由系统控制理论衍生而来的结构振动控制与动力学减振措施在建筑和桥梁等方向已有较为成熟的研究[24],而且在全世界范围内得到了广泛的应用。就高坝泄流诱发水工结构振动而言,动力学减振措施的研究较为缺乏,实际应用尚处于空白。其原因可能是由于闸门的流激振动机制过于复杂,从而使得系统本身的不确定性限制了动力学减振措施的应用[25]。瞿伟廉等[26]和杨世浩[27]基于结构振动控制理论,提出利用磁流变阻尼器衰减弧形闸门的流激振动,并研究了LQ和遗传优化模糊两种半主动控制策略,为水工闸门的动力学减振措施研究做了有益的工作。但该研究仅限于数值模拟,距离实际应用还有较大差距。
本文考虑近年来在大型水电站机组进水口事故闸门原观试验中发现的闸门无法完全关闭并伴随爬行振动的工程问题,从控制理论的基本观点出发,将启闭机落绳位移作为系统输入,闸门系统和非线性摩擦特性作为系统的两个环节,闸门下落绝对位移作为输出,构建负反馈控制系统模型以描述闸门的运动状态。通过理论计算结果同实际运动状态对比验证了所提出模型的有效性,并阐明了上述工程问题的发生机制,可以为旨在避免类似工程问题的闸门优化方案和工程改造措施提供理论指导。
2 事故闸门无法落门并伴随爬行振动的工程问题
2.1 工程问题的原型和模型试验研究现状与分析2015年汛期,天津大学对某水利枢纽泄洪洞进口事故闸门进行了动力学原观试验[15],该泄洪洞进口采用岸塔式结构,塔体内布置潜孔平面滑动钢闸门作为事故检修闸门,闸门孔口尺寸为12.0 m×15.0 m(宽×高),后接有压隧洞。闸门设计水头50 m,启闭速度1.81 m/min,试验采样频率为512 Hz。门叶支撑结构为滑块-滑轨系统,由容量为2×5500 kN,扬程为58 m的固定卷扬式启闭机操作。图1给出了上游水头50 m,工作闸门60%开度工况下,闸门关闭过程中启闭机机架顶部的水平振动位移时程。可知在闸门小开度落门情况下出现了特殊形式的振动,并在振动消失的瞬间闸门停止下落。
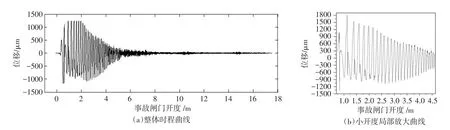
图1 某泄洪洞进口事故闸门落门过程原观振动位移时程
图2(a)给出了在上述工况下同步观测的事故闸门荷重,虽然数据超过传感器量程,但仍可看出闸门小开度落门时发生了低频振动,其频率与启闭机室振动频率吻合。闸门小开度时虽然也可能出现明显的流激振动,但应表现为具有较大随机性和较多高频分量的振动形式。类似图1和图2(a)所示的周期性、大幅度、包络线光滑的来回跌荡,更像是闸门周而复始的忽停忽跳、忽慢忽快的非线性摩擦振动,即机械系统中常见的“爬行”现象。为了进一步对上述工程问题进行研究,针对水电站机组进水口事故闸门同样无法完全落门的另一实际工程,利用模型试验测试了闸门下落过程中的闭门持住力[28],如图2(b)所示。该闭门持住力时程同样呈现周期性、低频率、大幅度且包络线光滑的来回跌荡,因此认为原型和模型试验中的闸门振动属于同一种振动形式,而且在模型试验中明确地观察到了闸门的爬行振动现象。文献[14-15]基于原型和模型试验数据,对事故闸门爬行振动的发生机制和防治措施进行了细致研究,但相关防治措施的拟定多基于直观现象和工程经验,缺乏明确系统的理论指导。
2.2 闸门爬行振动发生机制的初步分析根据上述爬行振动现象的观察与分析,可以将闸门爬振的物理过程描述如下:闸门在匀速下落过程中,启闭机钢丝绳的初始拉伸变形产生储备闭门力。当闸门落门阻力较大时,通过钢丝绳拉伸变形的恢复,部分储备闭门力得以释放,促使闸门下落。所释放的储备闭门力的大小为钢丝绳弹性变形恢复量与其拉伸模量的乘积。扬程60 m、容量400 t的卷扬式启闭机一般可采用6倍率直径40 mm的捻制钢丝绳起吊,根据工程经验,其拉伸模量约为50000 MPa,重负荷条件下的伸长率可达2%,根据启闭机2 m/min的落绳速度,由钢丝绳最大弹性变形恢复到松弛状态需要约36 s,这为闸门忽停忽跳的爬行运动提供了条件。
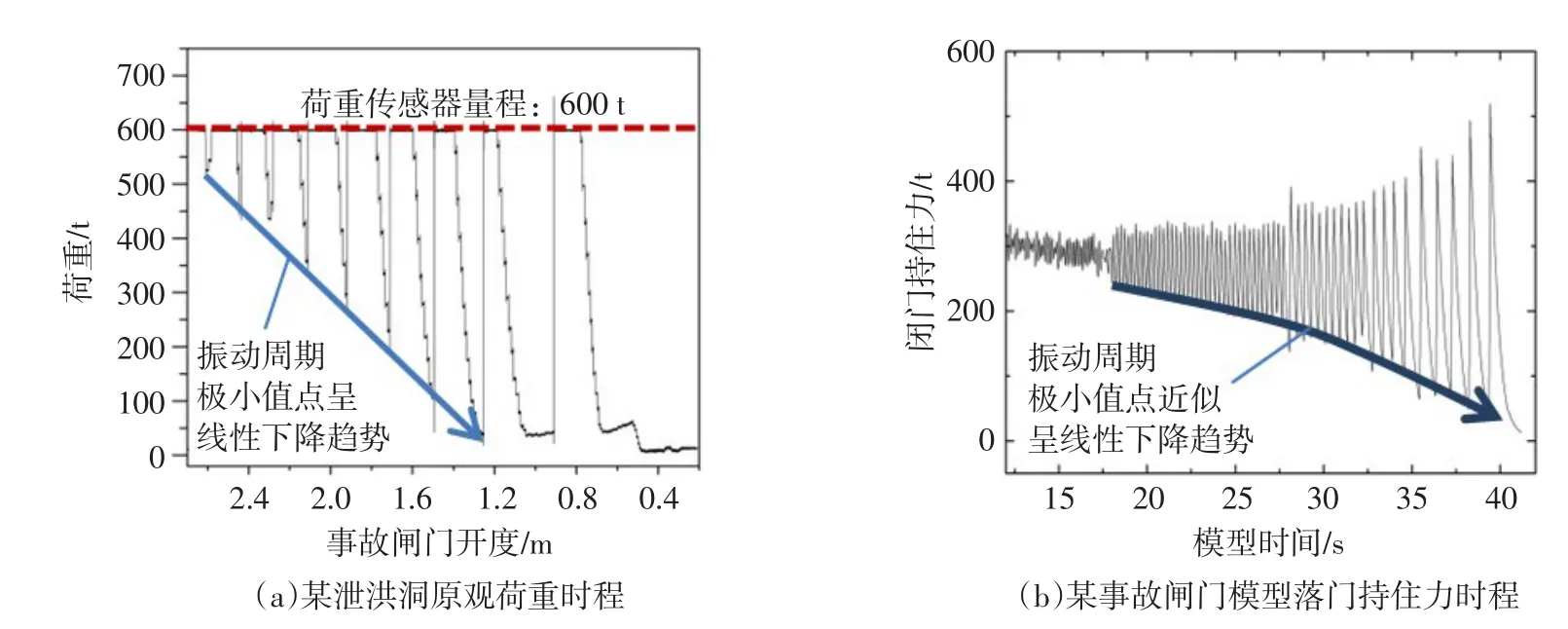
图2 不同水利工程发生闸门爬行振动时的落门持住力时程
当闸门下落遇到阻力时,其下落速度减小,钢丝绳弹性变形缓慢恢复,如果弹性变形的缓慢恢复不足以克服阻力,闸门就会停止下落。这时虽然储备闭门力的释放速度达到最大,但闸门受到的动摩擦力变为静摩擦力,钢丝绳需要释放额外的储备闭门力以克服最大静摩擦力与动摩擦力之差,才能使闸门启动下落,从而形成了闸门爬振周期中的停止阶段。当释放的储备闭门力足够大时,闸门启动下落,其所受静摩擦力瞬间转换为动摩擦力,钢丝绳释放的额外储备闭门力转化为加速度,使闸门加速下落,导致钢丝绳再次弹性拉伸,直至落门停止,储备闭门力达到最大,从而形成闸门爬振周期中的下落阶段。假设闸门与支撑轨道间的动摩擦力与最大静摩擦力相等(即不考虑动/静摩擦力转换的非线性特性),闸门将在平衡点附近做上下振荡运动,并在阻尼的作用下振荡逐渐衰减,随平衡点一起匀速下落。但由于闸门在与滑轨保持静止的瞬间动摩擦力转换为静摩擦力,闸门阻尼振动本身具有的恢复力无法克服最大静摩擦力使闸门保持运动状态,因此闸门进入下一个爬振周期中的停止阶段,直至钢丝绳弹性变形再次恢复到足以克服最大静摩擦力时,闸门启动加速下落,进而循环往复形成爬振。
图3给出了机组进水口事故闸门落门过程的受力分析,相关符号的物理意义均在图中进行了说明。由图可知闸门受到的自重Gm、配重Gj和水柱压力W方向向下,利于落门;水推力T随着闸门的下落线性增加,其产生的摩擦力f方向向上,不利于落门;启闭机钢丝绳的刚度力Fk即为闸门的储备闭门力,随着弹性变形的减小而释放;阻尼力Fc主要起到抑制振荡的作用,对闸门能否落门影响不大;闸门底缘脉动压力P方向不定,随机性较大,非平稳性、非均匀性较强,且包含高频分量,荷载特性不易确定。爬振过程中储备闭门力经历释放-储备-再释放-再储备的循环过程,如图2所示,爬振周期内的持住力极小值点逐渐减小,即克服最大静摩擦力所需释放的储备闭门力逐渐增大,且其变化趋势呈现良好的规律性,尤其是泄洪洞事故闸门荷重原型观测数据,其极小值点几乎呈现线性下降趋势。这种线性变化趋势一方面是因为在一定淹没深度下,利于落门的受力W、Gj和Gm将不随闸门下落而变化,而阻碍落门的摩擦力f(这里主要指最大静摩擦力)总是随淹没深度的增加而线性增加。另一方面从侧面反映了底缘脉动压力P对闸门爬振的影响较小,否则如图1或图2所示的反映爬行振动的信号中必然带有较强的随机性和非线性性质,并包含一定的高频成分。实际上,针对底缘为腹板(具有上下表面)的闸门的模型试验表明,其上下表面所受的脉动压力相对W、Gj、Gm和f而言均较小,且相互之间部分抵消[28]。同时,不考虑底缘脉动压力可以大幅简化闸门动水落门爬振理论模型的构建,利于在合理简化的条件下对闸门爬振作用机制展开分析。综合以上因素,后续分析中忽略了底缘脉动压力对闸门爬振的影响。
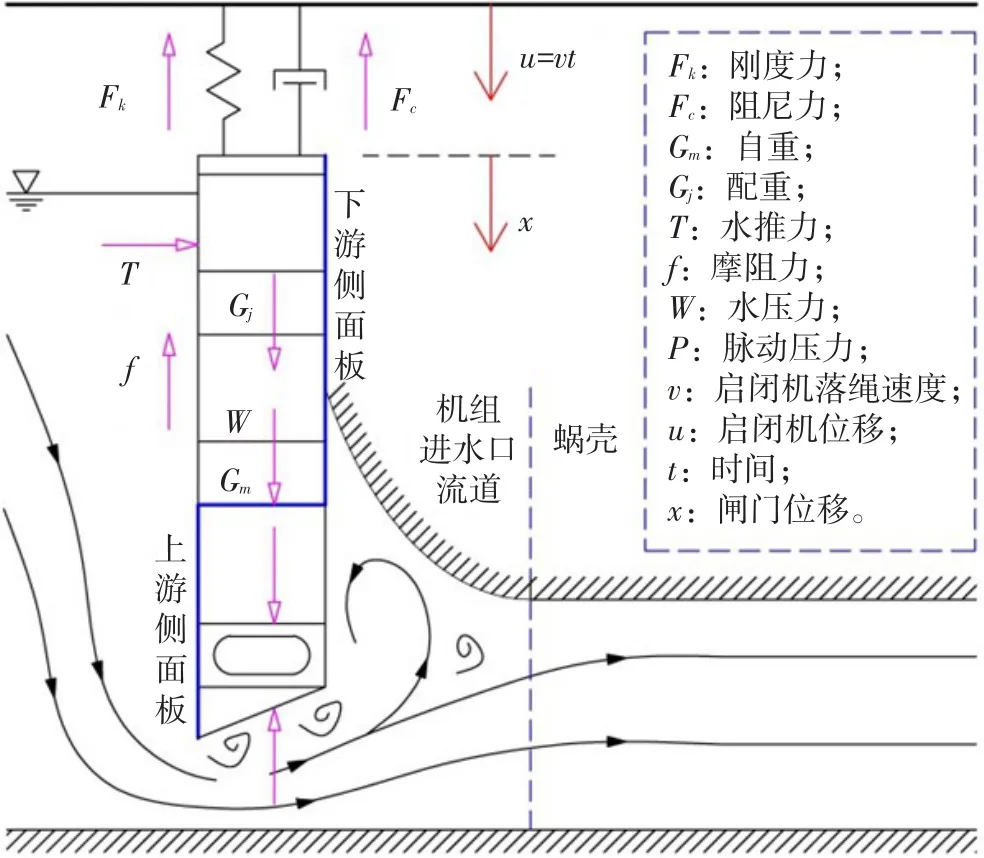
图3 机组进水口事故闸门系统受力分析
3 基于控制理论的事故闸门动水落门爬行振动理论模型
3.1 不考虑非线性环节的闸门动水落门过程分析水工闸门作为一个机械系统,在合理考虑水流作用后,其动力学行为完全可以用系统控制理论的理论体系和分析方法进行描述和研究。本文从系统控制理论的基本观点出发,将由动/静摩擦力转换导致的非线性摩擦特性从闸门动水落门过程中剥离出来,作为一个单独的环节,并合理选取被控量与参据量,构建了负反馈控制系统模型用以描述事故闸门的动水落门过程,如图4所示。图中启闭机钢丝绳下降位移u(t)为系统输入,闸门的绝对位移x(t)为系统输出,闸门与钢丝绳的位移差y(t)为中间环节的输入,下标1和2表示了不同环节对输入信号的过滤作用。

图4 事故闸门动水落门过程的系统结构
在不考虑非线性环节的条件下对闸门落门过程的运动状态进行分析,可得如下所示的动力学基本方程:

式中:m、c和k分别表示闸门质量、启闭机钢丝绳阻尼和刚度;上标′和″分别表示对相应变量求一阶和二阶导;其它参数的物理意义如图3所示。
引入自变量y=x-u,式(1)可以表示为:

将上式两边同除以m,并进行适当化简可得:

化简式(3),可得:

其中,

取常数α,使下式成立:

式(6)可以化简表示为如下形式:

式(7)即为不考虑非线性环节条件下,事故闸门动水落门过程的相平面等倾线方程,即相轨迹经过该等倾线上的任一点时,其切线斜率都等于α,据此可以绘制描述闸门运动状态的相平面图。
结合某实际工程参数及其物理模型试验测试结果[28],将绘制相平面图所需的相关参数选取如下:闸门高13.8 m,宽5 m,质量67 t,配重块质量40 t;卷扬式启闭机采用直径40 mm、6倍率捻制钢丝绳起吊闸门,落绳速度为2 m/min,捻制钢丝绳弹性拉伸模量取为50000 MPa;该实际工程中滑块与滑轨间的滑动摩擦系数远大于规范取值,是闸门无法完全落门并产生爬振的主要原因,取为0.15;在一定工况条件下,闸门下落至1.6 m开度时发生爬振现象,此时受到竖直向水柱压力1.50×106N,水平向水推力1.46×107N;根据我国建筑抗震设计规范的要求,结合实际中启闭机钢丝绳阻尼较小的情况,将阻尼比ξ取为0.03;根据文献[4,29]的研究,闸门顺水流方向振动时水体对闸门产生较为明显的附加质量效应,垂直水流方向振动时水体的附加质量效应较小,可忽略不计;为了方便分析,闸门爬行振动开始时的初始相对速度ẏ和相对位移y均取为0。
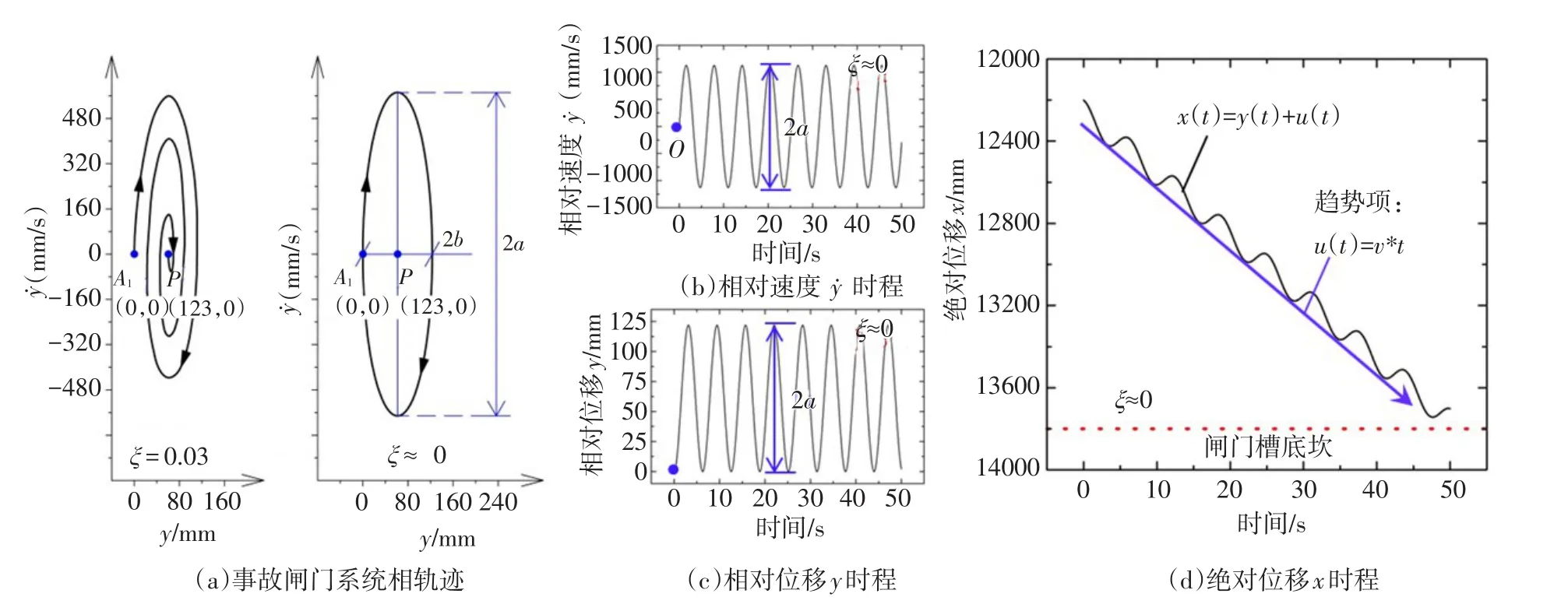
图5 不考虑非线性环节的事故闸门动水落门过程振动分析
根据上述参数,由相平面等倾线方程(7)绘制不考虑非线性环节的事故闸门动水落门相轨迹曲线,如图5(a)所示。可知相轨迹由原点出发,当阻尼比ξ=0.03时闸门首先在平衡点附近作上下振荡运动,然后振荡运动逐渐衰减收敛至平衡点,最终随平衡点一起匀速下落。实际上,阻尼比ξ为0.03时的相轨迹为对数螺旋曲线[23],其绕平衡点P旋转的圈数远远多于图中所示,主要是由于ξ较小,振荡运动经反复多次后才能衰减消失。
为了计算和分析的方便,将阻尼比近似取为0,由式(4)可得:

化简得,

整理上式可知在阻尼比ξ=0的条件下,闸门运动相轨迹退化为椭圆曲线:
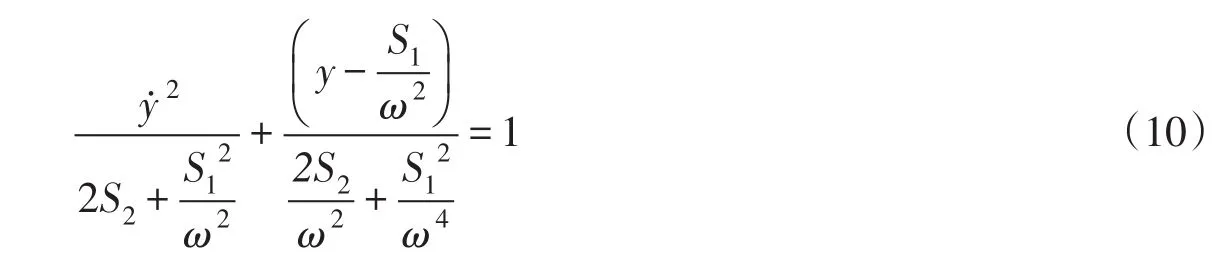
其中,

图5(a)给出了ξ=0时的闸门相轨迹曲线,由于没有阻尼耗能作用,闸门将围绕某一平衡点做无限循环振荡运动,同时该平衡点还将以速度v匀速下落。图5(b)(c)基于闸门的相轨迹,给出了ξ=0时相对速度ẏ和相对位移y的时程曲线。由关系式y=x-u可求得闸门绝对位移x的时程图,如图5(d)所示,即事故闸门以启闭机落绳位移u(t)为基准,在匀速下落的同时叠加循环振荡运动。值得注意的是,上述理论模型中闸门和钢丝绳的相对位移y总是大于0,即钢丝绳总是处于张紧状态。而且,由后续分析可知,即使引入非线性环节,这一条件仍然成立。一方面该条件符合实际情况,即除最后一个爬振周期外,其余时刻的闭门持住力均大于0(如图2所示),表明在停止落门之前钢丝绳不存在放松状态;另一方面,始终处于张紧状态的钢丝绳为理论模型的建立提供了方便,即可以自然地将钢丝绳弹性伸长模量作为系统刚度,不需要考虑钢丝绳张紧和松弛对刚度力Fk的非线性影响。
3.2 引入非线性环节的闸门动水落门过程分析通过2.2小节对闸门爬行振动发生机制的初步分析可知,动/静摩擦力转换是闸门发生爬振的重要条件。这一非线性特性可以表述为:当闸门与支撑结构由相对运动变为静止时,闸门受到的动摩擦力f动瞬间转换为静摩擦力f静,闸门阻尼振动所具有的恢复力小于最大静摩擦力与动摩擦力的差值,因此不足以克服最大静摩擦力使闸门启动;当闸门与支撑结构由相对静止变为运动时,静摩擦力f静瞬间转换为动摩擦力f动,导致闸门加速下落。该非线性特性可以用如下解析式描述:

在椭圆相轨迹方程(10)所描述的闸门动水落门过程运动状态的基础上引入式(12)所表示的非线性摩擦特性,可以绘制如图6(a)所示的单周期闸门动水落门相平面图。图中初始爬振周期从相对速度ẏ和相对位移y均为0的启动点A1开始运动,由于闸门所受的指向朝上的合力F上和指向朝下的合力F下的相对关系变化,相对速度ẏ先变大后减小,直至相轨迹到达停止点B,形成了爬振周期中的下落阶段。停止点B的相对速度ẏ=-v、绝对速度ẋ=0,触发式(12)所示的非线性摩擦特性,阻尼振动所具有的恢复力无法克服最大静摩擦力使闸门从绝对静止状态中重新启动。因此,相轨迹将从停止点B沿水平线ẏ=-v向左移动,闸门和启闭机钢丝绳的相对位移逐渐减小,钢丝绳弹性伸长不断恢复,储备闭门力逐渐释放,形成了爬振周期中的停止阶段。当相轨迹运动到A2点时,所释放的储备闭门力足以克服最大静摩擦力,闸门重新启动,进入下一个爬振周期。值得注意的是,若启动点落在阴影区域(如图6(a)中An所示),钢丝绳初始拉伸变形up完全恢复,无法再释放更多的储备闭门力,因而闸门无法启动,落门停止且爬振现象消失。
在考虑非线性环节的条件下绘制如图6(b)所示的多周期闸门动水落门相平面图。图中闸门爬行振动从A1点启动,由A1到B1再到A2分别经历爬行振动的下落和停止阶段;然后由A2进入下一个爬振周期,从A2到B2再到A3重复上述爬振的下落和停止阶段。以此类推,形成持续的爬振现象。当爬振启动点向左移动到An时,进入图6(a)所示的阴影区域,此时钢丝绳弹性变形较小,不足以释放足够的储备闭门力使闸门启动下落,从而导致闸门无法完全落门,同时爬振现象消失。值得注意的是,B1和B2点的横坐标不具有固定的相对大小关系,其相对大小取决于A2点的启动加速度是否能够使闸门加速下落,在B2点产生大于B1点时钢丝绳的拉伸变形。当停止点Bn的钢丝绳拉伸变形随时间增加而增大时,爬振周期内持住力曲线极大值点不断增大,形成类似图2(c)的曲线;当停止点Bn的钢丝绳拉伸变形随时间增加而减小时,爬振周期内持住力极大值点将逐渐减小,试验中也得到过类似的爬振曲线。
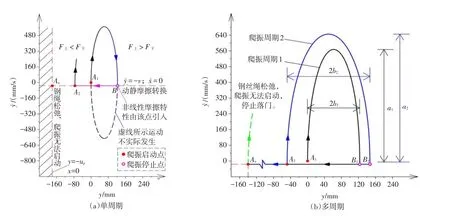
图6 引入非线性环节的闸门动水落门相平面图
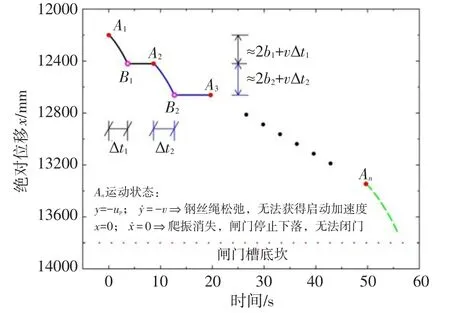
图7 闸门爬振位移时程
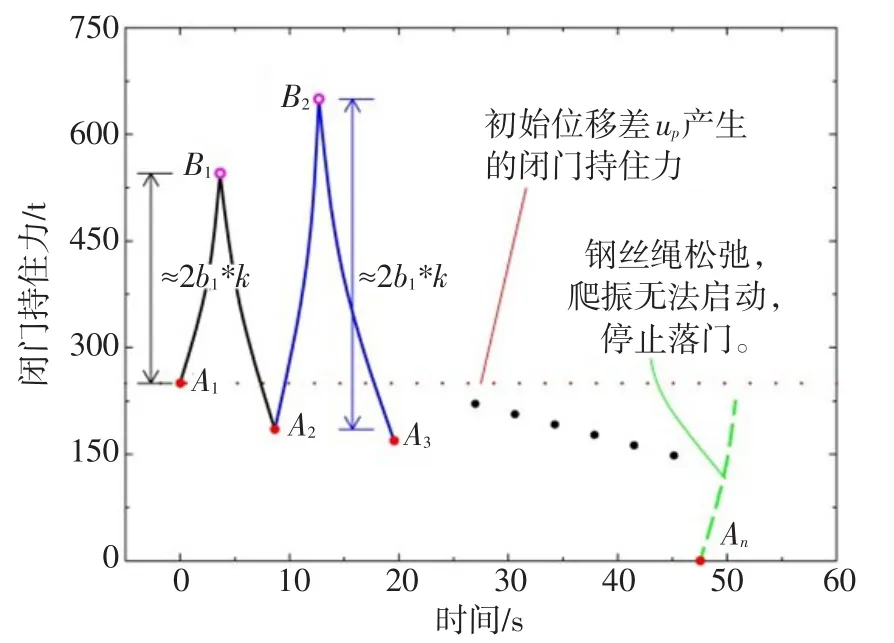
图8 闸门爬振落门持住力时程
爬行振动是一种同时具有小尺度振动和大尺度位移的复杂运动形式,其位移时程难以通过传感器直接测量。图7给出的由理论模型反衍的位移时程曲线符合爬行振动位移的一般形式,可以为涉及爬振位移时程的研究提供参考。
图8给出了由理论模型反衍的闭门持住力时程,从A1到A3闸门分别经历了爬振周期1和2的下落阶段和停止阶段,然后爬行振动持续发生直至An点无法启动。图8所示的持住力曲线与图2(b)大致相仿,多个爬振周期串联在一起即与实测持住力振动形式极为相似。注意到图2(b)中的爬振周期明显小于图8所示,主要是由于图2(b)横坐标为模型时间,换算到原型需乘以模型比尺的0.5次方。通过图2(a)的原型数据计算爬振周期(周期内落门位移/落门速度),可知爬振周期约为12 s,与理论模拟结果较为接近,表明所提出的理论模型是合理有效的。
4 促进闸门下落并减小爬行振动的工程措施
为促进闸门落门并衰减爬行振动,关键是破坏闸门无法落门和发生爬行振动的必要条件。由上述分析可知,闸门无法落门是爬行振动发展到一定程度的结果,即无法落门之前往往伴随爬行振动,而发生爬行振动并不一定导致无法落门,这也与模型试验结果相符[28]。因此,上述工程问题的解决方案可以分为两个目标进行研究:一为保证闸门完全落门,一为避免发生爬行振动。
从图6(a)可知,为了保证闸门完全落门,应避免爬振周期的启动点落入阴影区,即工程上的改进措施应使启动点尽量靠右。实现这一目标有两种途径:使椭圆相轨迹中心点右移;或在中心点位置不变的情况下减小椭圆的短轴长度。综合来看,是求函数Z的最大值问题。

结合式(5)和式(11)分析可知,为了促进闸门下落而常用的增加自重Gm、配重Gj和水柱压力W,以及减小摩擦力f的改进措施,一方面有助于相轨迹中心点右移,一方面也会使椭圆短轴加长,因此一味地加大Gm、Gj和W并减小f是否在任何情况下都有助于闸门落门还需在上述理论模型的基础上进一步讨论。事故闸门动水落门的原型和模型试验经验表明,减小f对于促进闸门落门较为有效,增大Gm、Gj和W在初期对促进闸门下落有较好的效果,但达到一定程度后再增加则效果不明显,甚至对于闸门落门具有阻碍作用。因此,行之有效的工程措施还需结合实际情况,通过求解maxZ对应的非线性规划问题而确定。
避免事故闸门发生爬行振动是在保证闸门完全落门之上的更高级目标,根据上述研究,大致可以总结出闸门爬行振动发生的两个必要条件:(1)闸门在下落过程中,发生与支撑轨道相对静止的运动状态;(2)闸门阻尼振动具有的恢复力不足以克服闸门与轨道间的最大静摩擦力。实际上,一旦闸门在下落中受阻而发生阻尼振荡,由于振荡速度的周期性变化,闸门与支撑轨道的相对静止状态几乎必然会发生。而且,在一个爬振周期内,启动点对应的闸门加速度最大,即受到的恢复力最大,由2.2小节的分析可知最大不平衡力数值上等于最大静摩擦力与动摩擦力之差,所以恢复力总是不足以克服最大静摩擦力。基于此,为了达到避免爬行振动发生的目的,应避免首个爬振周期的产生。初步分析表明将滑动落门系统改为滚动落门系统能够大幅减小闸门下落过程中的阻力,有效避免首个爬振周期的产生;同时,适当增加落门速度也有助于推迟甚至避免爬振的发生,因为落门速度越大,储备落门力释放速度越快,有助于闸门在动水落门过程中克服阻力,推迟甚至避免首个爬振周期中停止阶段的形成。
5 结语
本文针对事故闸门无法完全落门并伴随爬行振动的工程问题,从系统控制理论的基本观点出发,将由动/静摩擦力转换导致的非线性摩擦特性从闸门动水落门过程中剥离出来,作为一个单独的环节,并合理选取被控量与参据量,构建了负反馈控制系统模型以描述上述工程问题。分析表明,理论模型与闸门实际运动情况符合良好,通过理论模型反演的闭门持住力曲线与实测数据较为相似,表明所提出的负反馈控制系统模型是合理有效的。基于上述理论模型,阐明了闸门无法完全落门并伴随爬行振动工程问题的发生机制,模拟了原型/模型试验中难以直接测量的闸门爬振位移时程,并研究了促进闸门动水落门并减小爬行振动所应采取的工程措施,为可能或已经发生类似工程问题的闸门的优化设计方案和工程改造措施提供了理论指导。同时,利用系统控制理论的基本观点和理论体系对水工闸门振动问题进行研究的方法,可以为高坝泄流诱发振动领域的其它问题的分析研究提供借鉴。
必须指出的是,上述理论模型中没有考虑底缘脉动压力作用,忽略了闸门垂直振动条件下水体的附加质量和阻尼,并假定动摩擦系数不随相对速度增大而减小,因此如需定量计算闸门动水落门爬振过程的运动状态,需要在准确估计理论模型各参数的基础上,通过研究避免上述简化造成的误差。
猜你喜欢
湖南水利水电(2021年6期)2022-01-18
化工机械(2021年4期)2021-09-11
经济技术协作信息(2020年23期)2020-02-28
中国卫生(2016年12期)2016-11-23
武汉工程大学学报(2016年3期)2016-09-27
新高考·高一数学(2016年3期)2016-05-19
中国水能及电气化(2016年11期)2016-02-28
中国医药导报(2015年27期)2015-02-28
中国水利(2015年4期)2015-02-28
中国水利(2015年2期)2015-02-28