基于卫星共视的钟驾驭方法研究
2019-01-14 10:43:18樊多盛刘娅李孝辉陈瑞琼
时间频率学报 2018年4期
樊多盛,刘娅,3,李孝辉,3,陈瑞琼
(1.中国科学院 国家授时中心,西安 710600;2.中国科学院 时间频率基准重点实验室,西安 710600;3.中国科学院大学,北京 100049)
0 引言
承担我国标准时间的产生、保持和发播任务的机构是中国科学院国家授时中心,它的守时系统是一个国家不可缺少的社会公益设施和基础性工程,其拥有世界排名第四位的铯原子钟和氢原子钟组成的守时原子钟组(包括6台氢原子钟,32台铯原子钟)[1],通过精密单点定位、卫星双向时间传递和共视等远距离时间比对方法与国际标准时间进行比对。UTC(NTSC)是国家授时中心保持的我国标准时间,多年来,UTC(NTSC)与UTC的偏差一直保持在10 ns以内。其建立的国家标准时间可以通过各种手段提供给不同行业的时间用户,同时,服务于我国国民经济发展也是国家授时中心的核心任务之一[2-5]。
目前,国际国内时频标准以铯钟和氢钟为主。而铯钟与氢钟的价格相对很昂贵,同时对运行环境的要求很高,对于大部分时间用户来说,选用铯钟和氢钟作为时频标准是不现实的。可是在具体应用场景中,许多时间用户又需要高精度的时频标准,所以,价格相对便宜的晶体振荡器便成了首选,但是,晶振存在一个明显的缺点就是频率偏移和老化,该缺点导致其输出的时间信号逐渐偏离标准时间,并且其长期稳定性较差,这不能满足高精度时间频率用户的精度要求[6-7]。最重要的是,时间用户要求他们的时间源与标准时间信号保持同步,目前常用的GNSS授时在精度与安全性能上无法满足用户;而基于卫星双向比对的时间同步,系统构造复杂、体积较大、移动不便、价格较高等,且无法在实际场景中应用,只能作为一种测试手段。综上两点,通过卫星共视比对技术和钟驾驭方法,在时间用户端,采用本地钟复现实现类UTC(NTSC)的时间信号,不仅使得用户的参考时间与国家授时中心保持的协调世界时保持了同步,同时使用户的时间精度得到了大幅度提高,而且节省了用户的费用,具有普遍应用价值[3-4]。
此外,第5代移动通信系统(5G)对时间源和时间同步的精度提出了更高的要求,要求在一定区域内基站空口时间同步的相对精度优于10 ns,时间源精度要求优于30 ns。同时,业界普遍认可5G时间服务器的关键技术包括本地时间源技术和异地多时间源比对测量技术,本地时间源技术包括单频和双频全球定位系统,而北斗卫星导航系统是不可或缺的;异地多时间源比对测量技术是采用异地共视差分技术消除空间电离层等干扰因素,进一步提升时间同步精度,使得本地信号可以溯源到更高精度的参考时间源[8-9]。
本地钟的时间偏差规律可以用二次多项式表示:
(1)
式(1)中,ξ(t)是噪声,包括各种不确定因素的影响。a0是初始时刻本地钟与标准时间的偏差;a1是本地钟的频率与标准频率的偏移率;a2是频率漂移,即老化,它是因本地钟自身的参数老化等原因产生的,在频率上呈现为线性的偏离标准频率,在时间上表现为二次项的趋势偏离标准时间[10-11]。
对于本地钟进行驾驭的策略,可以采用调整本地钟的相位,也可以采用调整本地钟的频率。但是,对本地钟的相位进行调整,会带来时间上的跳变。因此,在本文采用调整本地钟频率的方法,这样本地钟输出的相位是连续的,更重要的是,通过频率调整的策略也能实现对相位的补偿[12-13]。
1 卫星共视时间间隔
1980 年美国国家标准局提出了卫星共视的方法,1983 年卫星共视方法用于国际守时实验室之间的原子钟进行时间比对[3-4],在本文,本地钟和国家授时中心主钟通过共同接收GNSS卫星系统的信号,在事后,通过数据交换的方法实现两地钟之间的时间比对,通过这种方法,本地钟就可以得到相对于国家授时中心主钟的时间偏差[3-4]。
基于卫星共视比对进行本地钟驾驭,对于本地钟驾驭而言,最关心的是时间偏差数据和共视时间间隔,而共视时间间隔,对于本地钟驾驭是尤为重要的。标准卫星共视的时间间隔是 16 min,其中 13 min用于数据采集,2 min用于数据处理,1 min等待下一个共视时刻的到来[4]。如果本地钟是铯钟,标准的共视时间间隔是足够的。但以铷钟或者压控晶振作为本地钟时,这样的共视时间间隔(16 min)不足以实时反映本地钟的运行情况。因为,铷钟或压控晶振的相对短期稳定性较好,长期稳定性差,对于高精度时间同步而言,这样的共视时间间隔内,铷钟或压控晶振早已偏离标准时间信号,给本地钟驾驭也带了大的波动,所以,在本文采用的卫星共视方法是根据具体应用场景和当前现有技术现状进行改进设计,与标准方法比较,其最大的区别是,选用了灵活、无间断的观测周期或共视周期,即实时数据处理的共视时间间隔,这样,就可以实时产生比对数据,得到本地钟的时间偏差。
2 钟驾驭原理
所谓的钟驾驭原理,包括怎样计算钟参数和如何使用该参数进行钟驾驭,在文中,通过卫星共视比对,根据得到的本地钟时间偏差数据,计算得到本地钟的时间和频率偏差参数,采用“乒乓球”控制方法对本地钟进行驾驭。
Arash Nemati acknowledges AGA for the scholarship support. The work is financially supported by A*STAR and IMRE under grant No. 1527000014.
2.1 最小二乘法
对于本地钟,它的时间偏差规律可以用二次多项式表示:
(2)
式(2)中,在短时间内,对于本地钟而言ξ(t)和a2是可以忽略不计的,因此,本地钟的初始相位和频偏可以表示为
T(t)=a0+a1·t。
(3)
在规定的时间内,T(t)和t之间的关系就可以近似认为是一条直线,因此,可以通过最小二乘法一次拟合解出本地钟的初始相位和频偏[6]。
具体而言,假定在t1时刻得到的时间偏差数据为T1,t2时刻得到的时间偏差数据为T2,t1到t2这个时间段为卫星共视时间间隔,在应用场景选定的情况下,t1到t2这个时间段为常数,记为σ。此外,对于本地钟而言,短期内老化对时间和频率偏差的影响很小,可以忽略不计。因此,这些量同本地钟参数a0,a1的联系可用公式(4)表示:
(4)
由式(4)可以解算出本地钟的频偏系数:
(5)
即:
(6)
由于σ是卫星共视时间间隔,也是时差数据交互周期,根据本地钟的不同特性,在我们的复现终端系统中,σ取值可以为1 min,5 min或10 min。
在估算出本地钟的频偏后,同时得到了σ时间段内本地钟的时间偏差,也即相位偏差数据,这样,就可以用此参数对本地钟加以调整控制。
2.2 “乒乓球”控制方法
根据一次最小二乘法估算出本地钟的相位偏差和频偏参数后,采用“乒乓球”控制方法对本地钟进行驾驭。所谓的“乒乓球”控制方法,它是一种控制本地钟频率运行的高效算法,主要分为粗调与细调两个过程。粗调是指调整本地钟的输出相位,细调是指调整本地钟的输出频率。无论是相位调整还是频率调整,都是以时间偏差的零值为中心点,使得本地钟围绕该零值往返于两个预先设定的范围内[10]。
根据计算得到本地钟的相位偏差、频偏和估算出下一次相位偏差,基于此三个数据,根据不同的情况可以计算出不同的本地钟调整量,对于本地钟的调整量计算方法有以下3种情况:
①当相位偏差和频偏都朝向零方向且同号,在频偏朝零方向运行时,应该保持频偏基本不变,即,对频偏产生的调整量不予以调整,此时,调整量是预测的相位偏差除以衰减因子和共视时间间隔,除以衰减因子是为了防止对本地钟的过调;
②当相位偏差和频偏符号相反时,可能有很多种调整方法,最理想的调整量是,相位刚偏离零值,无需对相位加以调整,因此,调整频偏即可,调整时需要频偏除以衰减因子,其目的是使本地钟的钟差速率为零值;
③在其他情况下,调整的目的是将钟的速率减小到零并使得钟差调整到零。即调整量为预测相位偏差除以衰减因子,再除以共视时间间隔,同时,加上频偏的调整。这种方法所引起的调整量较小,不会造成本地钟偏差出现大的反向。
通过以上3种方法,计算得到本地钟的频率调整量,对本地钟进行驾驭,本地钟就可以根据参考时间信号运行,在计算调整量时,一定要注意衰减因子的选择,过大会导致调整缓慢,同时会使时间偏差拉大;过小会导致调整过度,破坏本地钟的短期稳定性。因此,对于衰减因子的选择要根据对本地钟的时间偏差和频率稳定性的要求进行考虑。
3 钟驾驭实现方法
针对以上卫星共视比对和钟驾驭方法,以压控晶振作为本地钟,我们设计实现了远程时间频率复现终端并进行了零基线测试。
压控晶振作为本地钟,通过卫星共视比对,经过数据交互就可得到一定时间段内压控晶振与UTC(NTSC)的时间偏差,由此,就可以对压控晶振进行驾驭,其工作原理见图1。单片机采集时间偏差数据,对时间偏差数据进行一次最小二乘拟合,得到频率调整量,根据驾驭算法,将相应的频率调整量发送给DA芯片,经过转化得到压控晶振的电压调整量,调节控制压控晶振输出的10 MHz频率信号,同时将压控晶振输出的10 MHz信号经过分频得到1 PPS时间信号,供用户使用。
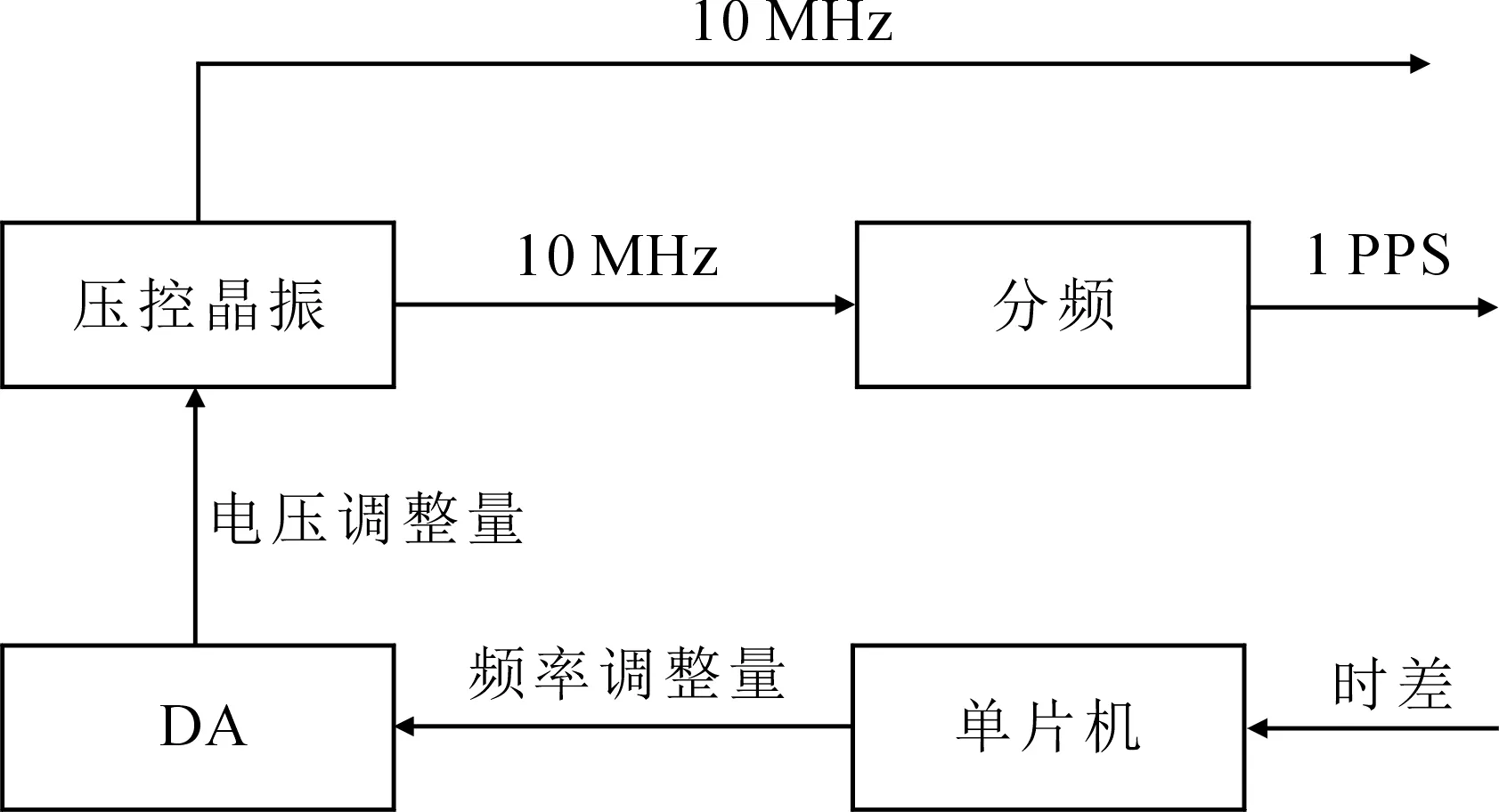
图1 压控晶振控制系统工作原理图
为了评估测试以压控晶振作为本地钟实现的时间频率复现终端,将复现终端放置在临潼本部,在复现终端运行稳定后,使用时间间隔测量设备测试压控晶振产生的1 PPS与UTC(NTSC)主钟之间的钟差,同时通过5125A测试压控晶振产生的10 MHz频率信号。其测试方法如图2所示。
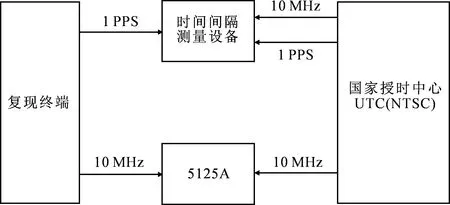
图2 时间频率复现终端测试原理图
对本地钟驾驭的关键是,采用最优估计本地钟的运行参数并使用合适的驾驭方法,在对本地钟短期稳定性影响最小的情况下,提高本地钟的长期稳定性和准确性。在本文中,本地钟是指压控晶振;本地钟的运行参数是指压控晶振的频偏。
4 实验结果
首先测试了压控晶振在自由运行的情况下产生1 PPS与UTC(NTSC)主钟之间的相位差,如图3所示,压控晶振在自由运行情况下1 d偏离UTC(NTSC)信号为17.6 μs,由此可见,压控晶振在自由运行情况下,1 d内偏离参考信号比较远,因此需要在有参考信号的情况下,对压控晶振进行驾驭,使其与参考信号的时差保持在合理的范围内。
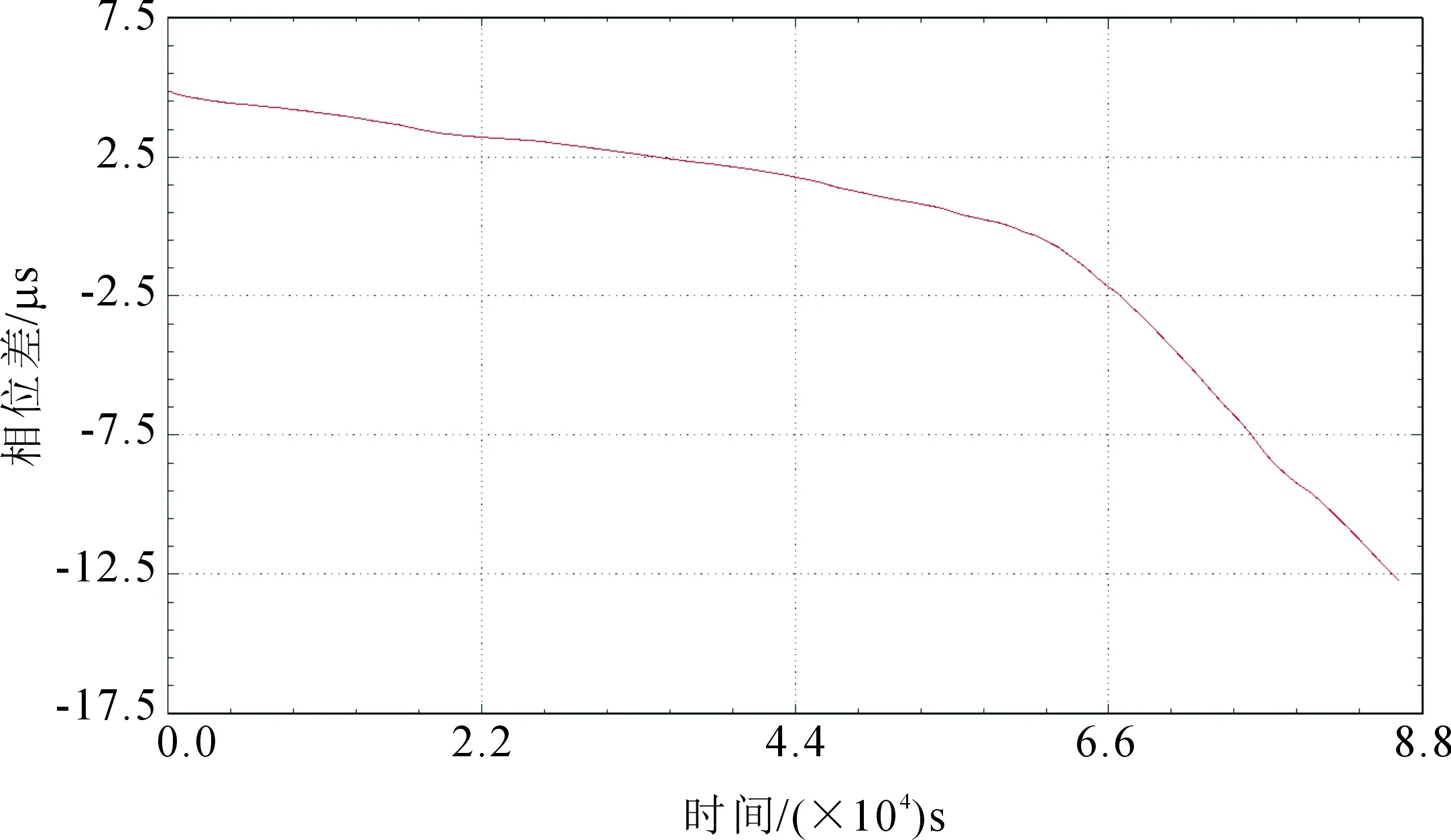
图3 自由晶振产生1 PPS与UTC(NTSC)钟差图
以UTC(NTSC)为参考时间信号,基于时间偏差数据,在复现终端对压控晶振进行驾驭的同时,使用时间间隔测量设备测量压控晶振复现的1 PPS与UTC(NTSC)之间的钟差值,从压控晶振受控开始到进入稳态整个过程的钟差如图4所示,压控晶振进入稳态后,其受驯压控晶振与UTC(NTSC)的钟差如图5所示,其Allan偏差如图6所示。由图3至图6可以看出,在40 min左右压控晶振进入稳定状态,其钟差稳定后的标准差优于2 ns内,MTIE优于13 ns/1 d。通过5125A测试复现终端压控晶振复现的10 MHz信号稳定性如图6所示,其测试所得Allan偏差值见表1,由图6和表1可以看出1 s采样的Allan偏差为2.98×10-12,10 ks采样的Allan偏差为5.4×10-13。
由图4至表1对比可以看出,以UTC(NTSC)为基准信号,通过卫星共视比对技术和钟驾驭方法,以压控晶振作为本地钟实现的时间频率复现终端,其输出1 PPS与UTC(NTSC)钟差的标准差优于2 ns,MTIE优于13 ns/1 d,1 s采样的Allan偏差为2.98×10-12,10 ks采样的Allan偏差为5.4×10-13;该款压控晶振其出厂给出的1 s采样Allan偏差为2.5×10-12。综上,可以看出基于卫星共视比对技术和钟驾驭方法以压控晶振作为本地钟实现的时间频率复现终端,其输出的10 MHz频率信号,在没有破坏压控晶振短期稳定性的前提下,使压控晶振获得了较好的长期稳定性;同时,其产生的1 PPS时间信号,准确性得到了极大地改善,且与UTC(NTSC)基准时间信号保持了同步。
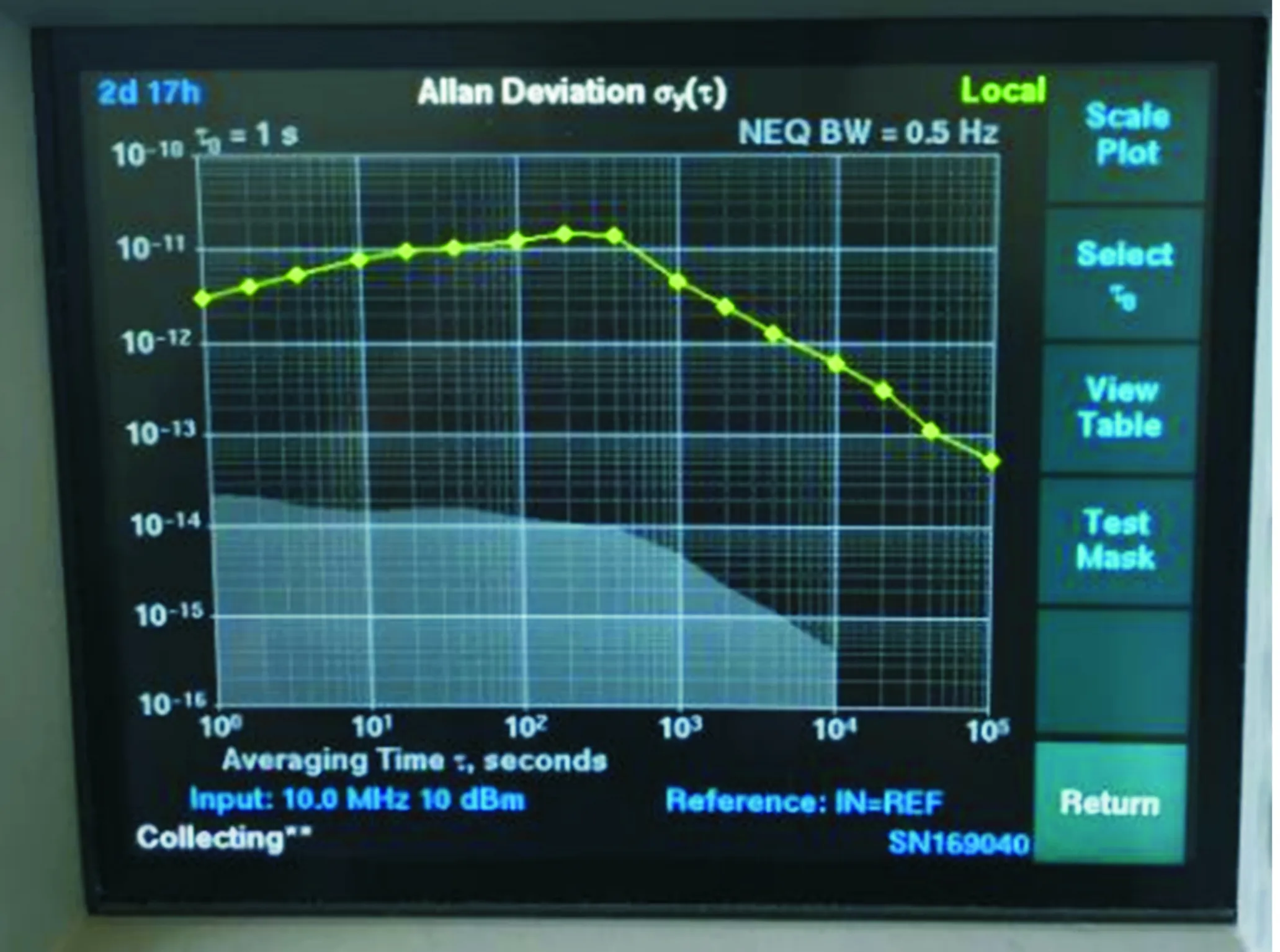
图6 受驯压控晶振输出10 MHz的Allan偏差示意图
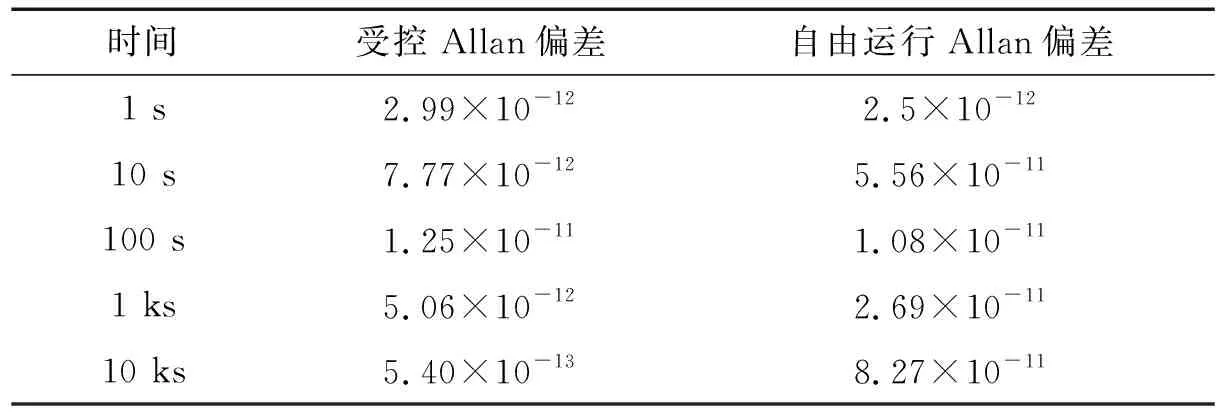
时间受控Allan偏差自由运行Allan偏差1 s2.99×10-122.5×10-1210 s7.77×10-125.56×10-11100 s1.25×10-111.08×10-111 ks5.06×10-122.69×10-1110 ks5.40×10-138.27×10-11
5 结论
以UTC(NTSC)为参考时间信号,通过卫星共视比对技术和钟驾驭方法,以压控晶振作为本地钟实现的时间频率复现终端,利用一次最小二乘法估算本地钟的参数,采用“乒乓球”控制方法计算本地钟的调整量,实现了对本地钟频率偏移和相位偏移的补偿。采用本文所述方法,结合UTC(NTSC)是国家标准时间信号和其长期稳定性较好与本地钟短期稳定较好的特点,在卫星共视比对的基础上,通过参数估计算法和控制方法,研制了以压控晶振作为本地钟的时间频率复现终端,使得复现输出的1 PPS与UTC(NTSC)钟差的标准偏差保持在2 ns内,MTIE优于13 ns/1 d,其输出10 MHz频率信号1s采样的Allan偏差为2.98×10-12,10 ks采样的Allan偏差为5.4×10-13。通过这种途径,基于卫星共视比对,本地钟可以直接建立与UTC(NTSC)的比对关系,共视数据误差较单向授时更小,可以快速(分钟)更新本地钟的共视数据,可以保证本地钟时间源的同步性能,为用户提供性能相当于铷钟量级的时间频率源,大大降低了时间用户的成本。同时,这种时间源实现方法,为新一代移动通信时间源和时间同步提供了可靠的解决方案,低成本有助于大面积应用,具有一定的实际应用价值。
猜你喜欢
辽宁科技学院学报(2021年3期)2021-07-01 07:33:16
时间频率学报(2021年1期)2021-04-26 12:34:34
数学小灵通(1-2年级)(2020年11期)2020-12-28 00:41:14
小学生学习指导(低年级)(2019年3期)2019-04-22 03:34:44
电子测试(2018年14期)2018-09-26 06:04:14
电子测试(2018年1期)2018-04-18 11:52:05
电子制作(2017年19期)2017-02-02 07:08:26
电子世界(2016年24期)2016-03-10 00:16:48
读写算·小学低年级(2014年4期)2014-07-24 22:42:55
微处理机(2013年6期)2013-07-20 09:40:14