具有过载保护功能的小型机械手结构设计
2019-01-12 07:29陈育明
中原工学院学报 2018年6期
陈育明
(黎明职业大学 机电工程与自动化学院, 福建 泉州 362000)
现代工业中机械手的应用越来越广泛,各类型机械手在劳动密集型、无太高技术要求的岗位上已逐步取代人力。小型机械手因其结构紧凑、机动灵活、适用广泛,在各个领域占据越来越重要的位置。2015年4月,南京技师学院开始面向全国进行首批“工业机器人专业”招生,此后国内越来越多的高职院校陆续开办了工业机器人专业。因此,设计一台贴近生产实际的小型机械手实训平台,用于学生实训、练习和竞赛很有必要。本文对小型机械手实训平台进行结构分析及设计,提出一款具有过载保护功能的新型夹持机构,并基于Solidwork软件对该设计进行三维实体建模,试图为后续研究提供仿真样机。
1 小型机械手实训平台结构分析
小型机械手是微小型机器人的重要组成部分,用于扩大微小型机器人的活动空间,是微小型机器人完成预定动作的关键机构。小型机械手可基于五自由度手臂设计,用动力装置驱动其各构件及末端执行装置的动作。文献[1]中针对生产实际的需要设计了一款带有过载保护的、独特的末端执行装置。该装置结构简单紧凑,对小型机械手实训平台的设计具有一定的参考价值。
1.1 小型机械手实训平台的组成
在教学及生产实际中,根据工件或产品夹持及搬移的需要,小型机械手实训平台应夹持有力、可靠,同时不允许损坏工件或产品,装夹定位要准确且精度要高。此外,小型机械手实训平台应安装在中小型移动平台上,以实现操作空间的扩展[2]。
图1所示小型机械手实训平台的基本组成为:底座、大臂、连杆、中臂、小臂、手腕及末端夹持装置[3]。考虑到小型机械手实训平台必须适应各种不同工位,且应具备抓取及放置灵活、准确等特点,为了保证机械手能够到达前后左右不同区域的各个工位,大臂相对于底座应能够完全回转;为便于夹取可能处于高低不同工位的工件,中臂应通过连杆与大臂以转动副连接;考虑到要夹持的工件有可能摆放不平整或外立面未必竖直,小臂与中臂应通过转动副进行连接[4]。
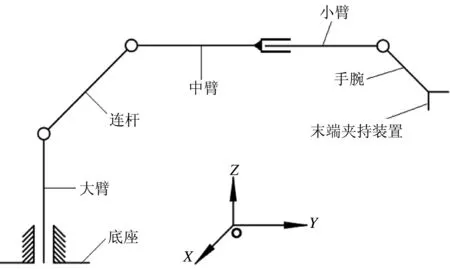
图1 小型机械手实训平台的基本组成
1.2 小型机械手实训平台的自由度
小型机械手实训平台的外观尺寸为500 mm×150 mm×300 mm,有效伸长约为450 mm。除末端夹持机构外,小型机械手由5个转动副构成,共5个自由度。大臂相对底座可绕Z轴做360°回转,小臂相对于中臂也可做360°回转,大臂与连杆间的相对转角不超过90°,连杆与小臂之间的相对转角不超过135°,末端夹持装置的张角最大不超过180°,各关节转动副及末端夹持装置的开闭机构均由动力装置驱动[5]。
2 小型机械手实训平台结构设计
2.1 总体设计
根据图1及上文所述实训平台的机构尺寸要求,可采用Solidwork软件对小型机械手实训平台各部件进行三维建模,并进行综合装配及运动学仿真。所设计小型机械手实训平台的三维模型如图2所示。
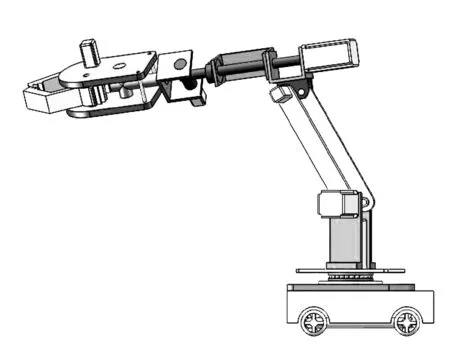
图2 小型机械手实训平台的三维模型
(1) 对小型机械手实训平台各转动副的驱动装置进行选择。考虑到电机的体积小、噪声低、控制便利、运行精度高、综合性能好,且机械手各关节所需的驱动力矩不大,可选择电机作为小型机械手实训平台的动力装置。
(2) 对材料进行选择。为了保证机械手在使用及行走过程中有足够的稳定性,小型机械手实训平台的底座应选用密度较大的钢材,必要时可加配重;机械手实训平台的手臂及连杆则选用强度高、密度较小的铝或铝合金材料。
(3) 确定底座行走方式。设计之初通常考虑履带和滚轮两种行走方式。由于滚轮后期的维护与更换容易,并且小型机械手实训平台基本上都安装在环境条件较好的实训室内,因此可采用滚轮行走方式[6]。
2.2 手臂及关节设计
(1) 手臂及关节是小型机械手实训平台完成执行动作的关键部件,设计上要确保机构转动灵活、更换方便、重心位置合理,且要与驱动电机配合良好。手臂的设计可采用双侧夹板与其他构件连接的方式(见图3)。

图3 手臂模型
(2) 在关节设计方面,因各构件之间为转动副,考虑到机构的平衡及其重心的稳定性,应合理配置电机位置。对于大臂与底座之间的关节,可将大臂的驱动电机设置于底座上大臂两侧的夹板之间(见图4);对于小臂关节,电机设置于小臂末端且可直接驱动小臂回转的位置较合理(见图5)[7]。
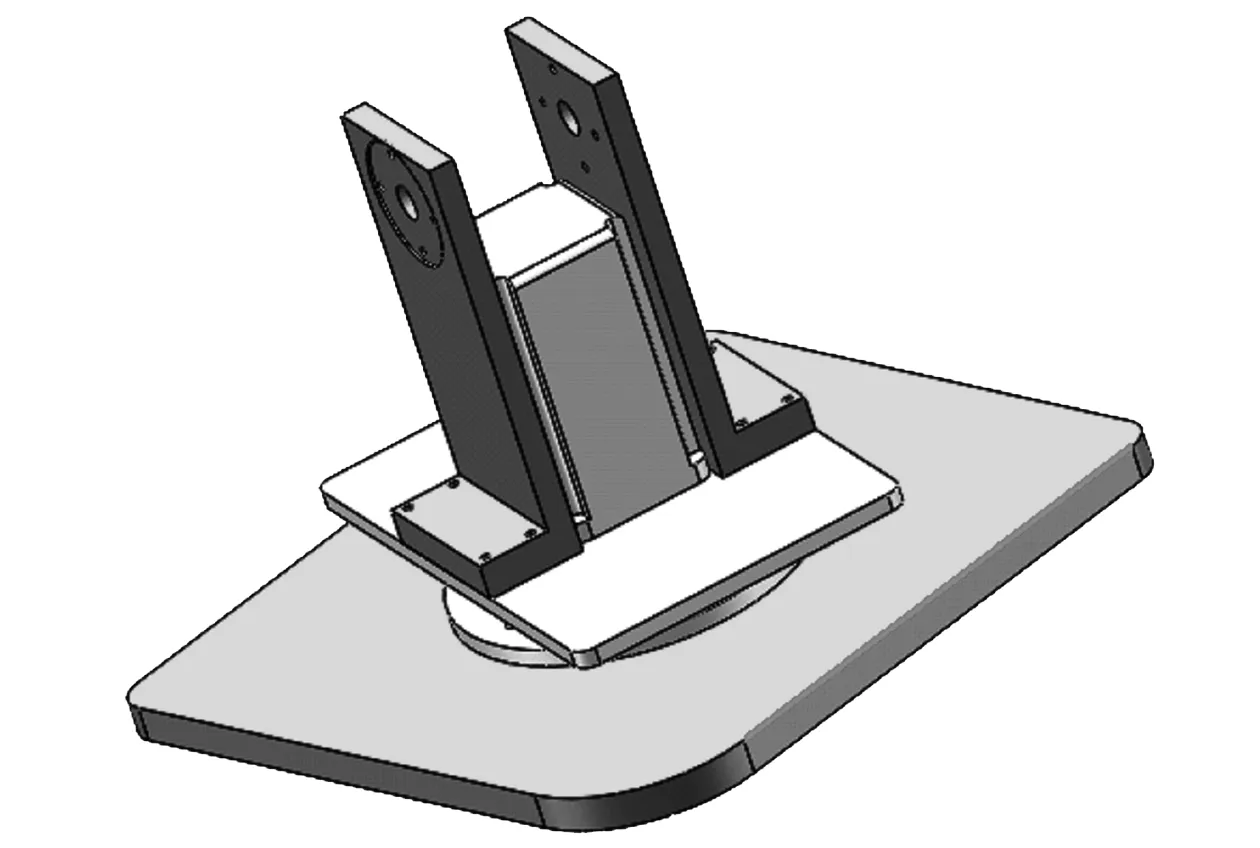
图4 大臂与底座关节结构模型

图5 小臂关节结构模型
2.3 末端执行机构设计
2.3.1 机构设计
机械手的末端执行机构有多种形式,常见的有吸附型、夹持型和托持型。对于夹持型而言,由于被夹持工件的形状、大小、耐夹持能力不尽相同,因此夹持机构的设计相对复杂。此外,末端执行机构的设计要求较特殊,既要保证夹紧可靠又不能夹伤工件。常见的夹持装置需要根据被夹持工件的大小及形状来设计手爪形状,并配合设计相应的传感器,以便将力觉信号反馈至单片机,进而调节末端执行机构的夹持力度[1]。本文设计的过载保护装置(见图6)可通过单纯机械方式实现小型机械手实训平台末端执行机构的过载保护。

图6 小型机械手实训平台夹持机构的过载保护装置
该过载保护装置通过一个驱动电机带动摩擦轮转动,由此产生与齿轮孔内侧表面的摩擦力,带动齿轮回转,在齿轮的啮合作用下实现夹紧功能。当夹紧力超过许用值时,摩擦轮与齿轮孔内壁之间打滑而实现空转,夹持力不再上升,由此保护被夹持工件。该夹持机构具有以下优点:结构简单,设计和制造容易,成本低廉,可实现一定尺寸范围的工件夹持。
根据上述设计结果,利用Solidwork软件,可建立小型机械手过载保护装置模型(见图7)[8]。
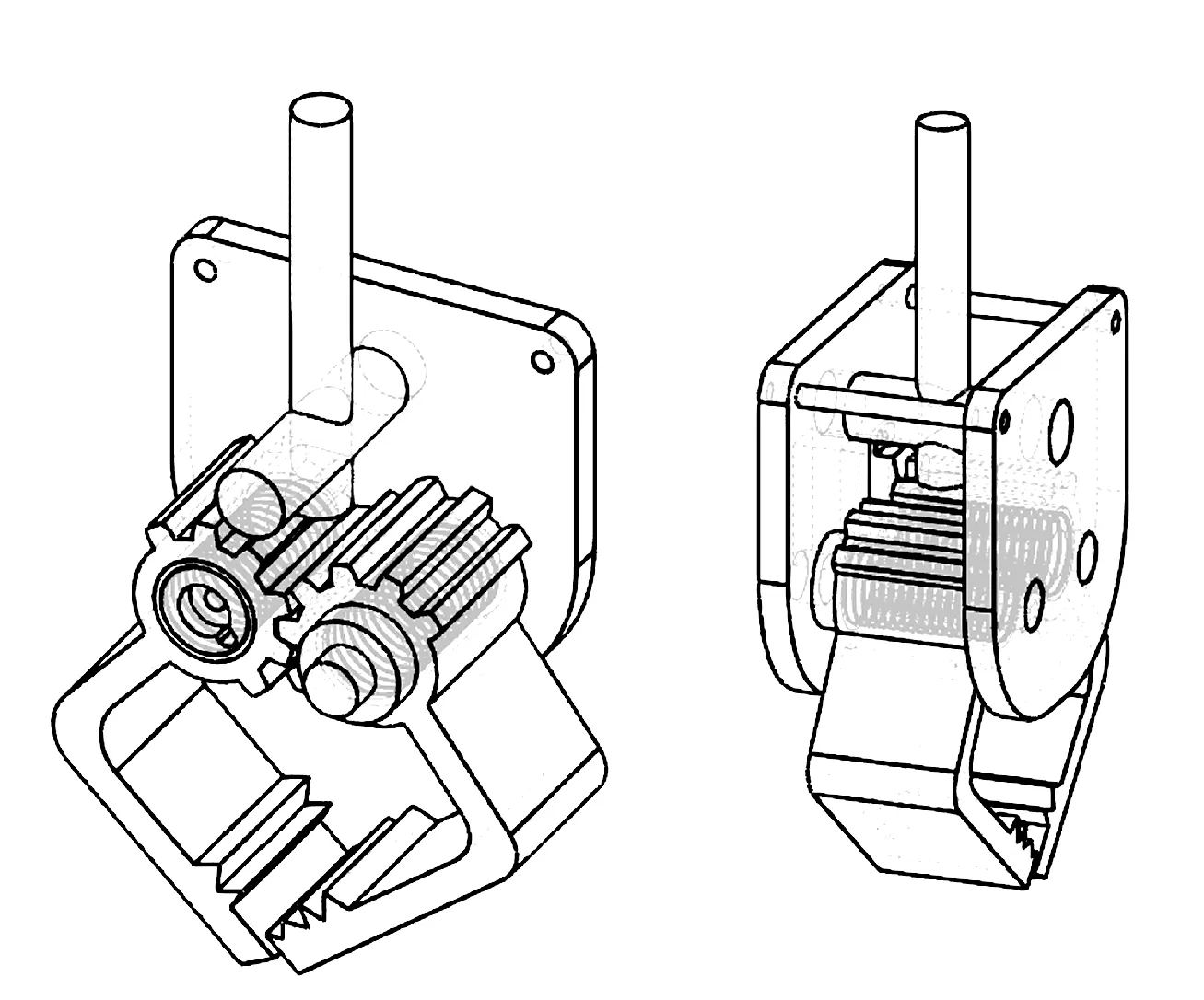
图7 小型机械手实训平台夹持机构的过载保护装置模型
2.3.2 机构力学分析
当夹持力在1 000 N以下时,假定摩擦轮起驱动作用,摩擦轮的外表面与齿轮孔的内表面之间为静态摩擦;一旦夹持力大于1 000 N,摩擦轮的外表面与齿轮孔的内表面之间因过载就开始打滑,二者之间的摩擦力为动态摩擦力。该摩擦力的大小由过盈配合的表面接触压力和摩擦系数确定[9]。
过盈配合的表面接触压力为:
(1)

设计要求规定:p·f≤50 N
(2)
式中,f为45钢的摩擦系数,取0.15。
可计算出:δ≤0.017 5 mm,即平均过盈量不超过0.017 5 mm。
3 小型机械手实训平台结构仿真分析
对该小型机械手实训平台进行结构设计后,采用Solidwork软件进行三维建模,可对其主要构件(包括大臂、小臂、手腕及夹持装置)的关节运动学特性进行仿真分析。该小型机械手实训平台的大臂、小臂、手腕及夹持装置的运动加速度仿真曲线分别见图8、图9、图10和图11[10]。
仿真结果表明,该小型机械手在工作过程中加速度曲线平缓、数值较小、无剧烈振动现象。因此,所设计具有过载保护功能的小型机械手的机构设计合理,运行稳定可靠。

图8 大臂X及Y方向的加速度曲线

图9 小臂X及Y方向的加速度曲线
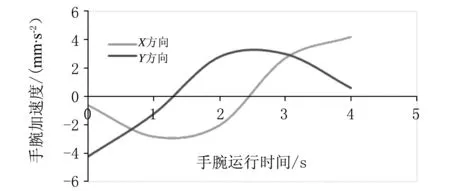
图10 手腕X及Y方向的加速度曲线
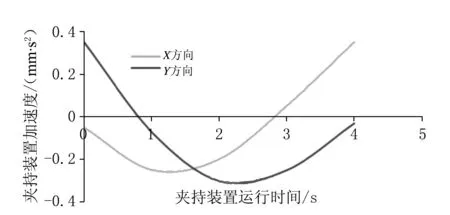
图11 夹持装置X及Y方向的加速度曲线
4 结 语
机械手在工业生产及高校教学中的应用越来越广泛,设计一款实用、简单、合理且稳定性良好的机械手具有实用价值。本文设计的具有过载保护功能的小型机械手实训平台,结构简单,构件布局合理。目前该过载保护装置已获实用新型专利授权。该小型机械手实训平台经Solidwork软件建模及运动仿真,运行效果良好。
猜你喜欢
包装与食品机械(2021年5期)2021-11-06
环境技术(2021年4期)2021-09-11
装备制造技术(2020年4期)2020-12-25
电子制作(2019年13期)2020-01-14
制造技术与机床(2019年12期)2020-01-06
组合机床与自动化加工技术(2019年5期)2019-05-24
制造技术与机床(2018年11期)2018-11-23
制造技术与机床(2017年4期)2017-06-22
载人航天(2016年4期)2016-12-01
综合智慧能源(2014年1期)2014-09-10