
Using Inverter-Based Renewable Generators to Improve the Grid Power Quality—A Review
2019-01-08 12:20:50TaoWangHengNian2andZhu
Tao Wang*, Heng Nian2, and Z. Q. Zhu
(1. Department of Electronic and Electrical Engineering, University of Sheffield, Sheffield, S13JD, U.K.;2. College of Electrical Engineering, Zhejiang University, Hangzhou 310027, China)
Abstract: With the increasing penetration of renewable power in the grid, renewable generators are expected to play more important roles rather than merely working as active power sources.Considering the high controllability and considerable idle capacity of the inverter-based renewable generators, various auxiliary functions for them have been studied to benefit the grid. Among these auxiliary functions, the grid power quality improvement is very promising. This paper presents a review of the emerging control strategies for inverter-based renewable generators to improve grid power quality. The related papers are classified with different power quality issues and technical routes,and a comprehensive comparison is presented. The future trends of this research area are also discussed.
Keywords: Renewable generator, auxiliary function, power quality improvement, grid voltage harmonic and unbalance.
1 Introduction
Renewable power is one of the most promising solutions to the increasingly serious energy and environmental crises. Most types of renewable power,such as wind, solar and tidal, are transferred into electricity for efficient and convenient utilization.Inverters are widely used as interfaces between renewable energy sources and the power grid. However, these inverter-based renewable generators have long been viewed by the grid as sources of pollution and risk.Subsequently, a lot of researchers has been focused on assessing and mitigating the pollution and risk from inverter-based renewable generators. Substantial work has been done to figure out the mechanism and extent of the impact of the inverter-based renewable generator on the grid stability and power quality[1-4]. As well,much effort has been spent on the hardware and control methods of inverter-based renewable generators to make them behave more like ideal power/current sources[5-6].
However, with proper modifications, most inverterbased renewable generators can provide some auxiliary functions to benefit the grid, such as power quality improvement, virtual inertia support, resonance active damping, etc. This is due to the high controllability and considerable idle capacity of most inverter-based renewable generators. With the wide use of high performance control chips and switching devices, more complicated functions can be integrated into the inverter-based renewable generators. Additionally, idle capacities of renewable generators are usually considerable,due to the inherent intermittency and low annual utilization hours of renewable power. Take China as an example, where the annual utilization hours of wind power and solar power were respectively 1728 and 1131 in the year 2016, which means over 80% of wind power capacity and 87% of solar power capacity can potentially be used for auxiliary functions to benefit grid.
Power quality is a key issue for the grid. Unqualified power quality can cause serious problems, such as increasing line loss, poor load performance and malfunction of relay devices. The most direct way to improve grid power quality is to introduce some dedicated devices, such as LC filter, static var compensator(SVC),active power filter(APF), static synchronous compensator(STATCOM), dynamic voltage restorer(DVR), unified power quality conditioner(UPQC), etc. However, LC-based passive devices lack controllability, since they can only deal with fixed harmonic orders or provide fixed reactive power compensation. Active devices are flexible and have good performance, but they are quite expensive. Alternatively, some flexible and low-cost means for power quality improvement are promising,such as using inverter-based renewable generators to compensate the grid power quality.
In the last few years, inverter-based renewable power generators have been mainly used to compensate different power quality problems including voltage harmonic, voltage unbalance, voltage deviation, or some combinations of them. As for the gird voltage harmonic or unbalance compensation, some studies focus on single-unit control, such as developing compensation methods based on load current measurement[7], voltage closed loop[8], or virtual impedance methods[9]. In order to increase the compensation capability of grid voltage harmonic or unbalance, some studies propose coordinated compensation methods for parallel generators, such as communication-based hierarchical control[10]and noncommunication autonomous control[11]. As for the grid voltage deviation compensation, studies mainly focus on the droop control[12]and the reactive power sharing[13].Moreover, the concept of multi-functional inverter emerged in recent years[14], which combines different auxiliary functions in a single inverter-based renewable generator. In addition, some other emerging techniques have been studied recently, such as giving the UPQC functions to the PV system with hardware modifications[15].
This paper is organized as follows: in Section 2 and Section 3, the voltage harmonic and unbalance compensation methods for single unit and multiple units are respectively introduced and compared. In Section 4,the voltage deviation compensation methods are introduced. In Section 5, the research progress of multi-functional inverter and the PV integrated UPQC are specially introduced. Finally, in Section 7, the future trends are discussed.
2 Voltage harmonic and unbalance compensation for single unit
In most cases, the voltage harmonic and unbalance problems are caused by non-ideal local loads, such as uncontrolled rectifier loads, phase-controlled rectifiers,and single-phase loads, etc.
Remark:In this review, both the harmonic issues and unbalance issues are regarded as harmonics, since the unbalanced (negative sequence) components can be treated as -1st order harmonics, and most methods for harmonic or unbalance compensation can be easily modified for the other.
The voltage harmonic compensation methods for single renewable generator can be classified as three types, i.e. methods based on load current measurement,voltage closed loop, and virtual impedance, respectively.
2.1 Load current measurement-based methods
Many methods in literature use inverter-based renewable generators to improve the power quality at the point of common coupling(PCC) by making the generators output proper harmonic current to counteract the impact of the non-ideal local loads. With these methods, the grid current(current through the transmission network) can be compensated as sinusoidal,thus the harmonic voltage drop will not exist on the transmission network. Therefore, the total harmonic distortion(THD) at the PCC can be reduced.
The structure of the load current measurementbased methods is shown in Fig.1, where the load current information is obtained with extra sensors and transferred to the renewable generator with necessary communication systems. Then, the harmonic components extracted from the load current are added to the output current reference of the generator, so as to counteract the impact of the nonideal local loads and improve the PCC power quality.
To track the current reference containing harmonic components, the current controller must have enough bandwidth. To address this issue, several controllers can be utilized, such as multiple PI controllers in multiple synchronous reference frames(SRFs)[16], multiple resonant controllers[17], repetitive controller[18], or some nonlinear control methods including model predictive control,sliding-mode control, etc.
Many cases in the literature using the structure in Fig.1 can be found. For example, in [7] and [19], doubly fed induction generators(DFIGs) are used to compensate the nonlinear local loads. In [20] and [21], photovoltaic(PV) systems are used. In [22] and [23], general grid-connected inverters are used. In [24], a squirrel cage induction generator(SCIG) is used. As mentioned before,all these methods require extra current sensors and communication systems.
To save cost, a novel measurement method based on pre-processing is proposed in [25], which transmits the harmonic orders and phase angles rather than the original load current waveforms, thus the transferred data size is reduced, and the low-bandwidth communication(LBC) system with lower cost can be used. In [26], a permanent magnet synchronous generator(PMSG) is used to compensate the nonlinear local loads without measuring the load current, since the grid current (the sum of the load current and the output current of the generator) is measured and directly controlled. However,in most conditions, the grid current measurement still requires a communication system, and there might be potential stability problems when the grid current is directly controlled by the PMSG converter. In [27], in order to decrease the number of current sensors, only the grid current is measured, and both the inverter output current and the load current are estimated with the DC voltage, switching state and the grid current. However,similarly with [26], the grid current measurement is not easy in most conditions.
The main advantage of the load current measurementbased methods is that the compensation effort can be easily adjusted by multiplying a gain(between 0 and 1)by the measured load current harmonic. However, these methods face two common problem: ① Only the power quality problems caused by the local loads can be compensated, but are invalid for power quality problems caused by other factors such as magnetic saturation of transformers, unbalanced grid impedance, and background harmonic in the distant bulk grid; ② The extra sensors and communication systems increase the cost and cause stability problems in communications delay. Moreover,when the local loads are quite distributed, these methods are difficult to implement.
2.2 Voltage closed loop-based methods
In order to avoid the load current measurement,some literature proposes a type of voltage closed loop-based method to eliminate the PCC voltage harmonic, as shown in Fig.2. Considering that the feeding line of the renewable generator is usually short,the PCC voltage is proximately equal to the local terminal voltage of the renewable generator. Therefore,the already-measured local terminal voltage is enough for the harmonic compensation, and extra voltage sensors or communication systems can be avoided.
Similar to the current harmonic controllers introduced in Part A, voltage harmonic controllers also require large bandwidth to achieve effective control of the voltage harmonic components. In [8] and [28], DFIGs are used to mitigate the PCC voltage harmonic, but the control structure is complex. A two-layer closed loop structure is used, including the outer voltage harmonic control loop and the inner current harmonic control loop, as well as use of multiple PI controllers in multiple SRFs,requiring a lot of coordinate transformations and harmonic extractions. In [29], PMSG is controlled to eliminate the PCC voltage harmonic, also with multiple PI controllers in multiple SRFs. The compensation effort can be adjusted in the partial compensation mode, but the network impedance is required in advance.
In [30] and [31], DFIGs are controlled with the same structure of [8] and [28], but the inner current harmonic PI controllers are replaced with a PIR controller, which reduces the coordinate transformations and harmonic extractions. However, the outer voltage harmonic control loop is still based on multiple PI controllers in multiple SRFs.
In [32-34], resonant a controller-based single layer control structure is proposed for grid-connected inverters, which can directly regulate the PCC voltage harmonic without any coordinate transformations or harmonic extractions. In [35], a DFIG is controlled with a resonant controller-based single layer control structure to eliminate the PCC voltage harmonic.
These methods which are based on voltage closed loop can compensate the PCC voltage harmonic without any extra sensors or communication systems. However,they all face a common problem: the compensation effort is not adjustable (except [29], but the network impedance is required in advance), since the voltage reference can only be set as zero, which means the objective is to completely eliminate the PCC voltage harmonic.
Considering the limited idle capacity of a single renewable generator, it is preferred to make the compensation effort adjustable for each generator.
2.3 Virtual impedance methods
Essentially, the voltage harmonic compensation can be explained with the concept of harmonic impedance network, thus the virtual impedance methods are very suitable for this task. The virtual impedance methods can be implemented with only the local variables, thus not requiring extra sensors or communication systems. As well, the compensation effort can be easily controlled by adjusting the virtual impedance, which is good for the generator protection and parallel operation. The structure of the virtual impedance methods is shown in Fig.3.
2.3.1 Conventional virtual impedance methods
The virtual impedance can be achieved with either the output variable feedback or the outer disturbance feedforward[36]. Both types of virtual impedance methods can be described as: multiply one of the local variables(output variable or outer disturbance) with an adjustable factor to produce the harmonic current/voltage reference,which is then tracked by the current/voltage controller.By adjusting the multiplying factor, the harmonic output impedance(HOI) of the renewable generator can be continuously adjusted.
In existing literature, the feedforward type is more popular, which can be further classified as the following different types:
Type A:For a generator in current controlled mode(CCM), the terminal voltage (an outer disturbance seen by the CCM generator) is used to form the harmonic current reference [9, 11, 37-40], i.e. =Yv V C_h.
Type B:For a generator in voltage controlled mode(VCM), the output current (an outer disturbance seen by the VCM generator) is used to form the harmonic voltage reference [41-44], i.e.=ZvIg_h.
Type C:For a VCM generator, the PCC voltage (an outer disturbance seen by the VCM generator) is used to form the harmonic voltage reference [45-48], i.e.
In the aforementioned three types of feedforward virtual impedance methods, Type A and Type B can be achieved with only the local information, but Type C uses the PCC voltage rather than the local terminal voltage, which in practice requires extra sensors and even a communication system.
Limited cases in the literature use the feedback type virtual impedance method. In [49], the output voltage of a VCM inverter is used to form the harmonic voltage reference, i.e.=GVC_h.
After obtaining the harmonic current/voltage reference, different controllers can be used to track the reference, such as the multiple PI controllers in multiple SRFs, resonant controller or repetitive controller in the fundamental SRF, etc. It should be noted that the virtual impedance methods with harmonic voltage loops can also be applied to CCM generators, which is the “hybrid voltage and current control approach” introduced in [32]and [40].
The flexible voltage harmonic compensation can be achieved by adjusting the multiplying factors. However,in a practical system, the over large feedforward or feedback gain will introduce risk to the system stability.Therefore, the compensation effort is only adjustable in a limited range.
Considering the fluctuation of most renewable power sources, the available idle capacity of a renewable generator for power quality compensation is timevarying. Therefore, the compensation effort is preferred to be adjusted in more wide ranges, and the full adjustability from “no compensation” to “full compensation” is even better. Thus, the conventional virtual impedance methods need to be improved.
2.3.2 Hybrid virtual impedance(HVI) method
In order to extend the HOI adjustable range of the conventional virtual impedance methods, a novel hybrid virtual impedance(HVI) method has been recently proposed to achieve more flexible voltage harmonic compensation[50-52]. The main idea of the HVI is to form the harmonic voltage reference with both the output variable feedback and the outer disturbance feedforward, just as follow:

Wherekis an adjustable coefficient.ZG_his the base value of the virtual impedance, which can be arbitrarily set, but is recommended to be the estimated grid impedance for thehth order harmonic, thus the HOI of the generator can have the same phase angle with grid impedance, and the circulating current can be avoided.
Assuming that the harmonic voltage reference is accurately tracked by the voltage controller, the following HOI can be obtained:

From equation 2, it can be observed that the HOI of the renewable generator can be adjusted from near zero to extremely large (theoretically from 0 to infinity), only withkvarying from 0 to 1. Thus, the full adjustability from “no compensation” to “full compensation” can be achieved. It should be noted that the system stability of the HVI can be well ensured, sincekonly varies from 0 to 1 in the whole-range adjusting of the desired virtual impedance, thus both the feedforward gain ofIg_hand the feedback gain ofVC_hwill stay quite small.
2.4 Comprehensive comparison
The aforementioned voltage harmonic compensation methods are comprehensively compared in Table 1.Generally, the load current measurement-based method is very intelligible, which is suitable for the condition where the non-ideal loads are concentrated and the communication system already exists, such as in a microgrid.
The voltage closed loop method which only uses local voltage lacks adjustability, making it difficult to be directly applied to multi units. However, if introducing a central controller with a communication system, the voltage closed loop can be implemented in the central controller, and the obtained harmonic current reference can be distributed among the multiple generators, and parallel operation can be achieved.
The Type A and Type B feedforward virtual impedance methods can be implemented with local variables, but the desired HOI can only be adjusted in limited ranges, making it unsuitable in conditions where the HOI needs to be adjusted in wide ranges.
The Type C feedforward virtual impedance method uses both the local voltage and the PCC voltage, thus has some disadvantages. It requires extra sensors and communication systems, and the desired HOI can only be adjusted in limited ranges for the stability issue.
The feedback virtual impedance method can be implemented with local variables, but it is only used in a limited number of cases in literature, which may be because it has even more serious stability problems as compared with the feedforward type, since the change of feedback gain can significantly impact the distribution of the system closed poles.
The HVI method is suitable for flexible voltage harmonic compensation, especially for the autonomous operation of multiple parallel generators.

Table 1 Comprehensive comparison of the different voltage harmonic compensation methods
3 Voltage harmonic and unbalance compensation for multiple units
Considering that the available idle capacity of a single renewable generator is usually very limited, it is necessary to study the cooperated operation of multiple units. In most cases, the two main objectives of the cooperated operation technique are: ① Adjusting the total compensation effort of all the parallel generators;② Adaptively distributing the compensation effort among these generators according to their operating conditions.
Generally, there are two types of cooperated operation techniques for renewable generators to compensate the grid voltage harmonic (unbalance is still treated as -1st order harmonic in this section), i.e. the hierarchical control based on communication and the autonomous control without communication.
3.1 Hierarchical control based on communication
Hierarchical control is a kind of multi-layer control structure that is widely used in microgrids, which consists of a central controller, a communication system,and a number of distributed renewable generators.Fig.4 shows two typical hierarchical structures for the coordinated voltage harmonic compensation of multiple renewable generators.
The objective of the secondary level, i.e. the central controller, is to adjust the total compensation effort of all the parallel generators. On this level, all the related generators are treated as an equivalent large generator,thus all the voltage harmonic compensation methods introduced in Section II can theoretically be implemented in the central controller. The primary level, i.e. all the individual generators, are controlled to track the harmonic current or voltage references transferred from the central controller.
For the CCM generators, it is more convenient to track the harmonic current reference, thus the structure in Fig.4(a) is usually used for CCM generators. In this structure, the load current measurement-based method,the voltage closed loop-based method, and the Type A feedforward virtual impedance method are suitable in the central controller[41,53]. It should be noted that, the compensation effort sharing can be easily achieved in the “compensation current distribution” block by distributing different harmonic current reference to each generator. The mostly commonly used distribution rule of the compensation effort is based on the remaining capacity of all the generators, which can best avoid the over- current problem and protect all the generators.
For the VCM generators, it is more convenient to track the harmonic voltage reference, thus the structure in Fig.4(b) is usually used for VCM generators. In this structure, the Type B and Type C feedforward virtual impedance methods are suitable in the central controller[10,13,46,54,54]. It should be noted that in this structure, the central controller sends the same voltage signal to all the generators, which means the central controller only undertakes the first objective, i.e. the adjustment of the total compensation effort of the parallel generator. However, the compensation effort sharing is achieved in each generator with some specially designed controllers. For example, in [54], anRv-Imaxdroop method with monotonic piecewise linear droop function is used to adaptively distribute the compensation effort among the parallel generators. In[10] and [13], the common harmonic voltage reference is multiplied by an adaptive factor in the primary level by each generator, and that factor is calculated according to the current harmonic distortion margin and the nominal powers of all the generators. In [54], PI controllers are applied to the differences between the local harmonic currents and the average harmonic currents of all the generators (both indqSRF of each harmonic), to obtain the compensation components, so as to achieve the equal sharing of the harmonic current.
3.2 Autonomous control of multi-units
To avoid the use of a central controller and communication system, autonomous control is a promising technique, which is usually achieved with a droop algorithm. Essentially, the two objectives of the coordinated operation can be achieved by adjusting the HOI of the generators. Specifically, the adjustment of the total compensation effort of all the generators can be achieved by controlling the parallel HOI of all the generators, and the distribution of the compensation effort among generators can be achieved by controlling the proportions among the HOIs of these generators.

Fig.4 Structure of the hierarchical control for voltage harmonic compensation and current harmonic sharing
Three types of droop methods for this target can be found in existing literature, i.e. theH-Yvdroop[9,11,39],H-Zvdroop[43], andH-Gdroop[49], which correspond to the Type A, Type B and Type C feedforward virtual impedance methods introduced in Section 2, respectively.HereHdenotes the harmonic power, which can be expressed as:

whereSactualis the apparent power of the generator and it is calculated asSactual=Vc_rms*Ig_rmsandPfandQfare the fundamental active and reactive powers of the generator.
The typical virtual impedance droop curves are shown in Fig.5. TheYv,ZvandGfactors obtained from the droop method are then used in the subsequent virtual impedance loop, as introduced in Section 2.
With The droop and virtual impedance methods, the compensation effort can be autonomously shared among all the generators according to their respective remaining capacities. Additionally, the total compensation effort of all the generators can also be flexibly adjusted by changing the starting point of the droop line, which can be achieved by either setting manual or set via communication. However, as mentioned before, all the feedforward based virtual impedance methods have stability problems when the desired HOI varies in large ranges, which limits the range of the droop method.
In order to extend the HOI adjusting range and achieve better compensation effort control and sharing, a hierarchical control structure is completely implemented in the local controller of each generator[50]. In the secondary level, the PI-based voltage harmonic control loop is used to determine thekfactor, which is provided to the HVI method in the primary level to adaptively shape the HOI of the generator. For this strategy,the main problem is the difference of the voltage measurement among all the generators, since it will be continuously amplified by the integration of the secondary PI controllers. This problem is addressed with a dead band applied to the input error of the secondary PI controller.
4 Voltage deviation compensation
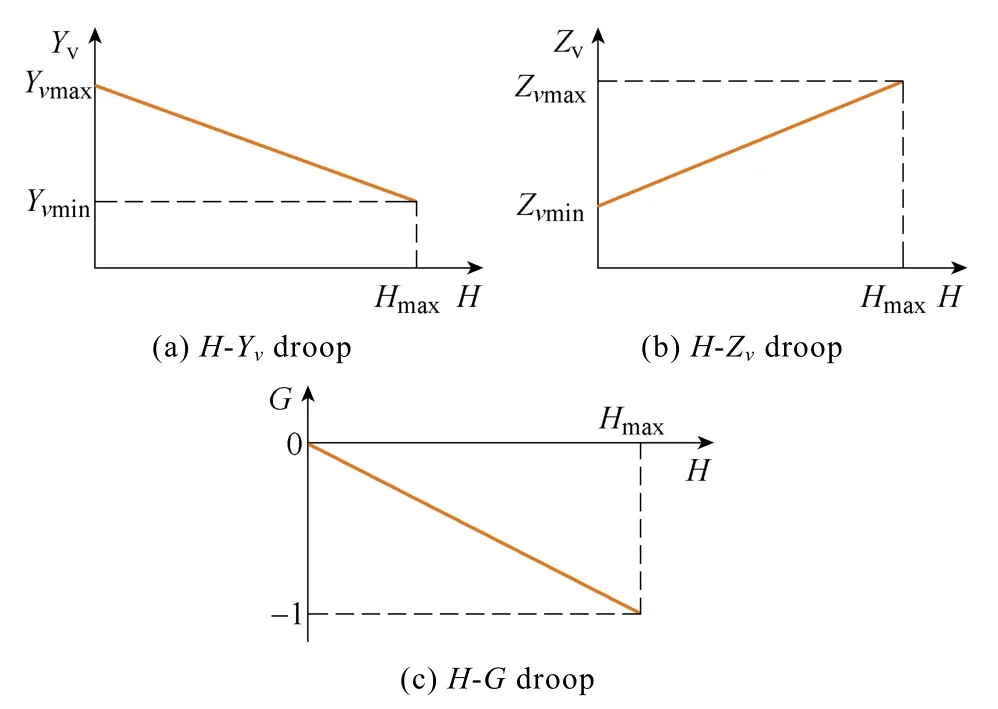
Fig.5 Typical virtual impedance droop curves
The voltage deviation compensation can keep the amplitude of the local grid voltage within the required range. Droop control is the most widely used method in inverter-based renewable generators for voltage deviation compensation. Furthermore, in order to properly share the power required by the voltage deviation compensation(usually reactive power), some methods based on secondary control are studied.
4.1 Droop control and its relationship to grid impedance
The basic idea of droop control is to establish a relationship between the terminal voltage amplitude and the output power (usually reactive power, but active power is still related in some conditions), and force the generator operate along the predefined droop curve.
Actually, the droop control design is highly related with theR/Xratio of the grid impedance. The power flow from the generator to the grid can be written as:

WhereVGis the amplitude of the stiff grid,VCis the amplitude of the terminal voltage (also the PCC voltage when ignoring the short feeding line).ZGandϕare the amplitude and phase angle of the grid impedance.δis the power angle, i.e. the angle between the terminal voltage and the stiff grid voltage.
From Equation 4, it can be observed that the relationship between the output power and the terminal voltagecan be depicted in three different ways when the grid impedance has different phase angles. Firstly, when the grid impedance is purely inductive, i.e.ϕ=90°, only the reactive power is related with the amplitude of the terminal voltage, i.e.VC. Secondly, when the grid impedance is purely resistive, i.e.ϕ=0°, only the active power is related withVC. Finally, when the grid impedance is resistive-inductive, i.e. 0°<ϕ<90°, both the active power and the reactive power are related withVC. According to this, three types of droop methods can be designed:
V-Q (or Q-V) droop:This kind of droop control is suitable for the purely inductive grid, which establishes the relationship between the output reactive power and the terminal voltage[11,56,57]. For CCM generators, the output reactive power is adjusted according to the measured terminal voltage amplitude (V-Qdroop), while for VCM generators, the terminal voltage amplitude is adjusted according to the measured output reactive power (Q-Vdroop).
V-P (or P-V) droop:This kind of droop control is suitable for the purely resistive grid, which establishes the relationship between the output active power and the terminal voltage[58]. For CCM generators, the output active power is adjusted according to the measured terminal voltage amplitude (V-Pdroop), and conversely for VCM generators (P-Vdroop).
V-PQ (or PQ-V) droop:This kind of droop control is suitable for the resistive-inductive grid, which establishes the relationship among the output active power, reactive power, and the terminal voltage[12,59].This kind of droop control is usually implemented with the concept of “virtual power”, which defines the new active and reactive powers based on a decoupling matrix related with theR/Xratio of the grid impedance. For CCM generators, the output active and reactive powers are adjusted according to the measured terminal voltage amplitude (V-PQdroop), and conversely for VCM generators (PQ-Vdroop).
More grid impedance conditions and corresponding droop methods design are considered in [60].
4.2 Voltage deviation compensation with secondary control
Considering that the inductive grid impedance is more common in practical systems, the voltage deviation compensation is more related with the reactive power flow. To evenly use the idle capacity of the renewable generators and better avoid the over current problems,the reactive power is preferred to be properly shared among all the neighboring generators. However, the droop methods alone cannot accurately distribute the reactive power, for the mismatch of the feeding line impedances. Meanwhile, the droop control is essentially a proportional control, thus the total compensation effort cannot be precisely controlled and the voltage deviation can only be reduced rather than being eliminated.Therefore, the secondary control loop is usually introduced to better compensate the voltage deviation.
On the one hand, to accurately control the total compensation effort, the bias of the droop curve for the primary loop is adjusted by the secondary control loop in a closed loop manner[13,61,62], as shown in Fig.6. In this method, a PI controller is used to control the total reactive power (for VCM generators) or the PCC voltage amplitude (for CCM generators), then the bias for the droop curve (ΔVforQ-Vdroop or ΔQforV-Qdroop)produced by secondary PI controller is transferred to each generator with communication systems. With this method, the total compensation effort can be accurately adjusted, and the voltage deviation can be eliminated when the secondary PI controller is applied to the PCC voltage amplitude.
On the other hand, to achieve more accurate reactive power sharing, the virtual impedance or the droop slope for the primary loop is adaptively adjusted with the help of the secondary control. In [63], the reactive power reference is distributed by the secondary controller with communication, and the reactive power error is integrated in the primary loop to produce the bias of the virtual inductance, so as to eliminate the impact of the feeding line mismatch and achieve equal sharing of the reactive power. Similar structure is used in [64], but the integrator in the primary loop is used to produce the bias of the droop slope. The structures of these two methods are shown in Fig.7.

Fig.6 Total compensation effort adjusting: droop bias adjusted by the secondary control loop
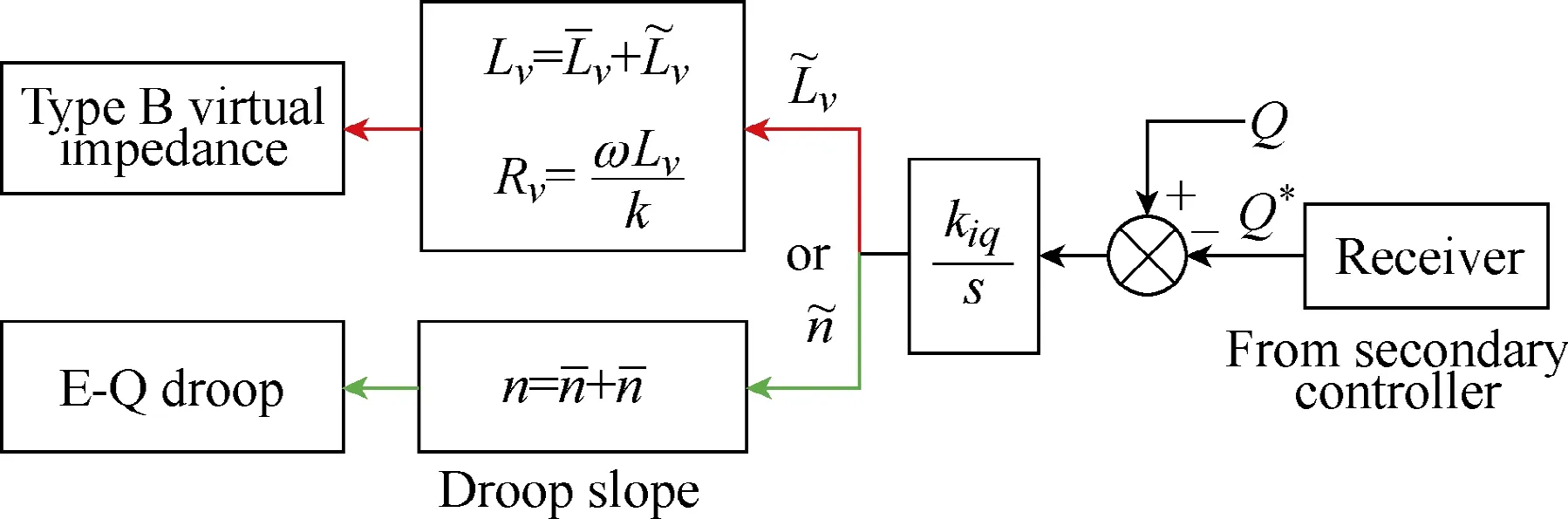
Fig.7 Reactive power sharing: virtual impedance and droop slope adjusted by the reactive power error integration
In [65], an intermittent increase in frequency is introduced by the secondary controller, and the consequent active power change is integrated to produce the bias of the virtual inductance, which can achieve the equal reactive power sharing. In [66], an interactive mechanism is designed between the secondary controller and the generators. In this method, each generator has the opportunity to trigger a synchronization event when its local voltage is out of the desired range, then the secondary controller will distribute a pulse to all the generators and trigger a redistribution of the reactive power by introducing different droop biases to all the generators.
5 Other emerging techniques
Apart from the power quality compensation methods introduced earlier, there are also some emerging techniques that are worth mentioning. Multi-functional inverter has been recently proposed to combine several different kinds of auxiliary functions together to comprehensively support the grid. With some hardware and control strategy modifications, the PV system can work as a unified power quality conditioner(UPQC) to deal with both the PCC voltage pollution and the non-ideal local loads.
5.1 Multi-functional inverter
Multi-functional inverter is a type of specially designed grid-connected inverter which combines various auxiliary functions including harmonic compensation,reactive power compensation, resonant damping, and even virtual synchronous generator(SVG). The main problem of the multi-functional inverter is the compatibility of all the different functions, or the switch among them.
In [14] and [67], the function of active power filter(APF) is implemented in the grid connected inverter.In [23], both the harmonic current and the reactive power required by the power quality compensation are autonomously shared among the parallel inverters, which are achieved by adaptively reshaping the equivalent conductance and susceptance of the inverter. In [68], the active/reactive power droop control, active power constraints, fault ride-through, harmonic compensation,intelligent mode switch, and low cost communication are comprehensively studied. In [69], a comprehensive power quality evaluation(CPQE) index is defined based on the catastrophe decision theory to quantify the power quality of a microgrid, then the multi-objective optimized compensation is achieved by minimizing the CPQE index with limited idle capacity. In [70], the functions including power quality compensation, SVG, and harmonic resonant damping are all integrated in the multifunctional inverter, which has more comprehensive grid support functions. In [71], the stability of the multifunctional inverter is studied, and the grid impedance is found to have significant impact on the system stability.The grid impedance information is then utilized to improve the system stability.
5.2 PV integrated UPQC
Recently, a novel PV structure has been proposed to integrate the function of UPQC. The UPQC contains a shunt part and a series part. The shunt part works as an average APF to compensate the non-ideal local loads,and the series part works as a dynamic voltage restorer(DVR) to compensate the PCC voltage harmonic or deviation. In [15] and [72-74], the PV panel is connected in parallel with the DC-link capacitor of the UPQC, thus the active power generated by the PV panel can be injected into the grid through both the shunt part converter and the series part converter.
The main advantage of this structure is the reduced cost. Specifically, only two three-phase converters are required, which is less than the number of an average PV system and a UPQC system together where three converters are required. However, this structure faces a main problem, i.e. the dynamic voltage restoration in the series part will absorb power from the DC link capacitor or inject power into the DC link capacitor, which will cause fluctuation of the DC-link voltage and impact the effectiveness of the maximal power point tracking(MPPT) of the PV.
6 Discussion on future trends
From the previous discussions, it can be seen that power quality improvement using inverter-based renewable generators is a promising technical route for the future power grid. The future trend of the auxiliary function of renewable generators can be summarized in a key word,“integration”. This trend can be viewed in the following two scenarios.
On one hand, more functions needed to be integrated together to comprehensively support the grid.Auxiliary functions including the voltage harmonic/unbalance compensation, reactive power compensation,resonant damping, and even virtual inertia, are waiting to be properly integrated together. Clearly, all these auxiliary functions demand some generator capacity, but the idle capacity for a renewable generator is always limited. Therefore, the optimized compensation scheme is needed to maximize the benefit from the limited idle capacity. Research on the multi-functional inverter has made some advancement in this field, but more work is still badly required. Mathematical tools including convex optimization, dynamic programming, artificial neural network, multiple objective fuzzy decision, analytic hierarchy process, are all worth trying.
On the other hand, more generators need to be integrated together to improve the capability and efficiency of the power quality compensation. The main problem is the compensation effort distribution among the multiple generators. In most of the existing papers, only the operating conditions of the renewable generators are considered when determining the compensation effort sharing. However, different compensation effort sharing schemes will cause different line losses and different overall power quality benefits. Therefore, the efficiency of the compensation should also be considered in the effort sharing algorithm, especially in the distribution grids and microgrids, where the renewable generators,sensitive loads, and power quality pollutants, are all highly distributed. Different optimization methods, low cost communication techniques, and even the emerging block chain technique can be interesting facets to be applied to the power quality field.
 Chinese Journal of Electrical Engineering2018年4期
Chinese Journal of Electrical Engineering2018年4期
- Chinese Journal of Electrical Engineering的其它文章
- Research on Clustering Equivalent Modeling of Large-Scale Photovoltaic Power Plants
- No-Load Iron Loss Model for a Fractional-Slot Surface-Mounted Permanent Magnet Motor Based on Magnetic Field Analytical Calculation
- Microgrid Relay Protection Scheme Based on Harmonic Footprint of Short-Circuit Fault
- Study of Pressure Balance for Press-Pack IGBTs and Its Influence on Temperature Distribution
- Field-Oriented Control and Direct Torque Control for a Five-Phase Fault-Tolerant Flux-Switching Permanent-Magnet Motor
- The Characteristics Analysis and Cogging Torque Optimization of a Surface-Interior Permanent Magnet Synchronous Motor