基于音波的复杂环境泄漏点检测算法
2019-01-08 01:56,,,
船海工程 2018年6期
,,,
(1.海军驻上海江南造船(集团)有限责任公司军事代表室,上海 201913;2.中国舰船研究设计中心,武汉 430064)
液体管道发生泄漏时,管道内液体从破裂点流出,使得管道内液体的流动参数发生变化。泄漏位置液体密度减小,压力降低,泄漏位置两边相邻区域的液体在压差的作用下向泄漏位置补充,从而使得泄漏位置相邻区域内的液体密度减小,压力降低,进而更远处的液体向泄漏位置相邻区间补充。这种传播过程依次向管道上下游进行,从而形成音波在管道内传播。安装在管道两端的两个音波传感器监听并采集音波传来的音波信号,判断管道是否发生泄漏。判断泄漏以后,根据音波到达不同位置传感器的时间差,计算出泄漏点的具体位置。
目前管网泄漏检测方法分为硬件检测方法和软件检测方法。硬件检测包括:光纤检测[1]、声发射技术法[2]、气体成像、探地雷达、管内探测球法[3]、GPS时间标签法[4]等。软件检测法是一种对参数实施检测并计算的动态方法,处理算法主要是时/频域算法[5],包括状态空间法、系统辨识法、瞬态模型和质量平衡法[6]等。当检测到管道泄漏后,需要对管道泄漏的位置进行定位,称之为管道泄漏定位技术,根据管道的形状不同,定位技术也不尽相同。管道泄漏定位的技术有:负压波法、压力梯度法、小波变换法[7-8]、基于神经网络[9]和模式识别的方法[10]、自适应滤波[11]的方法等。
在应用中,主要工作为检测泄漏所产生的音波,并计算各个采集点音波到达的时间差。音波采集设备存在采样频率低、信号采集后有拖尾效应以及采集的动态范围固定,会产生截止失真,导致音波的起始点检测难度加大。由于应用中的液体传输管道为“日”字形或“目”字形,音波在通过弯头或阀门时会有影响,因此,要设计适用的泄漏点检测算法难度较大。
1 泄漏信号检测
由于受到噪声、回波、传感器动态范围和精度的影响,要想准确计算出音波的时间差难度较大。噪声和回波使音波检测器检测的音波发生波形叠加,致使原始波形失真,因此,使用起始点检测法难度较大。实际测量表明,波形会发生截止失真、量化失真和拖尾,受传感器动态范围和精度的影响,对波形的量化失真尤为突出。图1为传感器音波图。
1.1 泄漏检测算法
当泄漏发生时,管网内会产生音波,通过检测到音波判断泄漏的发生,然后根据波形来估计参数。没有泄漏时,由于管网内存在环境噪声,音波传感器采集的音波数据强度基本处于平滑状态,但具有微小的波动。泄漏发生后,产生的音波传输到传感器,数据强度具有明显的上升并在到达波峰后下降,经过几个振幅逐渐减小的周期后,趋于平滑状态。
判断泄漏的常用做法,当音波强度信号大于泄漏阈值时,则认为管道发生泄漏,其中值根据实际环境噪声情况进行调整。为了使泄漏检测更加准确,使用幅值累加差分均值法,其公式为
(1)
1.2 音波时间差计算
声波在液体中传播,液体属于阻尼介质,声波在阻尼介质的传播方程为[12]
p=ρ0e-αxej(wt-k0 x)
(2)
式中:p为声压;w=2πf;k0=w/c0;α为媒质的阻尼吸收系数,是描述音波振幅随距离衰减快慢的一个物理量;ρ0为介质密度;w为角速度;f为声波频率;c0为声波传播速度;x为声波传播距离;k0为无阻尼波的波数。从式(2)可见,研究泄漏音波信号的传播特性首先要分析其频域特性,主要是各个频率分量所占的比率。由于音波信号起始部分为瞬变信号,传统的频谱分析法不适合,因此,采用单自带改进分解和重构的小波分析法来对泄漏音波进行频率分析。选取小波基为sym5小波,尺度为12,子带范围为(0,0.366),(0.366,0.732),(0.732,1.465),(1.465,2.93),(2.93,5.86),(5.86,11.72),(11.72,23.44),(23.44,46.88),(46.88,93.75),(93.75,187.5),(187.5,375),(375,750),(750,1500)分析,得到各子带能量输出占总能量比在不同压力下的分布见图2。
由图2可见,泄漏音波主要能量分布在(0,0.366)和(23.44,46.88)子带,而且压力变化对子带能量输出占比影响不大。对于复合频率的信号,使用曲线拟合主要有:多项式拟合、幂函数拟合和指数函数拟合。根据实际数据计算各种拟合函数得到的误差见表1。
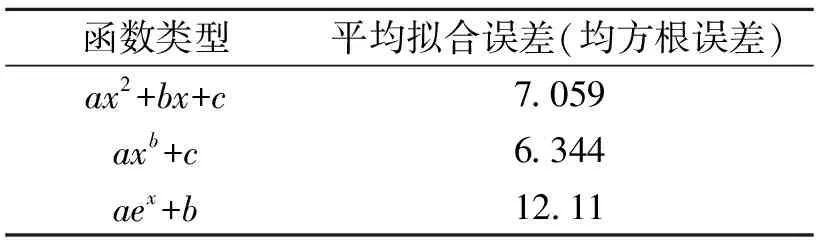
表1 拟合函数误差表
从实验结果可以看出,幂函数axb+c平均拟合误差最小,使用axb+c形式对泄漏音波曲线进行拟合。设x0为波形泄漏起点时间,也是拟合的起点。x1为拟合原始波形终点的时间,也是拟合曲线的终点,y1为拟合原始波形终点幅值。当x=x0时,y=0;x=x1时,y=y1,最终拟合算法公式为
(3)
通过拟合一部分原始波形找到合适的拟合曲线,根据100组实验得出拟合波形的参数,通过拟合一部分原始波形找到一个合适的拟合曲线。参数是通过实验得到。拟合示意见图3。
图3中实线为原始波形,虚线为拟合的曲线,通过反推找到突变点。
2 泄漏定位
低音频音波传播距离较远,若管道直径较大,则管道壁对音波的速度的影响较小,音波的传播与在开阔地传播情况基本一样。图4为泄漏定位原理图。
音波探测传感器N1安装在点A,传感器N2安装在点B,AB之间的距离为LAB。点O为AB中点,点X为假设的管道上任意一处泄漏点;v为音波在管道内的传输速率;TA为音波传感器N1接收到的时刻;TB为音波传感器N2接收到的时刻;TX为泄漏点泄漏时刻。为了求出LAX和LBX的长度(LAX为泄漏点距离A端长度,LBX为泄漏点距离B端长度),假设t1为泄漏点音波传输到A端N1的时间,t2为泄漏点音波传输到B端N2的时间,v0为泄漏点音波的传播速度,则
(4)
(5)
LBX=LAB-LAX
(6)
将式(6)代入式(5),得
(7)
将式(4)等号两边减去式(7)等号两边,得
(8)
将式(8)化简得
(9)
LBX=LAB-LAX
(10)
由式(9)得
(11)
由于管道内音波传输速率与管道通径、刚度、流体速度、密度、管道内滞留气体均有关系,与理论音波速率相差较大。拟采用人工模拟泄漏方法按式(11)测得实时音波速率,用实时音波速率对式(9)的理论音波传输速率进行修正,最终获取泄漏点位置。
3 实验分析
传感器数字化量12 bit量化,采样率为500 Hz。试验管道内为水成膜泡沫液体,密度为1.02 g/cm3,实验管道内径为32 mm,压力为0.3 MPa,管道模型图见图5。
3.1 单管道实验
将AF管道、BE管道、CD管道以及FH管道切断,使整个外环管道形成一条未封闭的单管道,管道示意图见图6。
其中,泄漏点如图6所示,B、C、D3个传感器几乎在同一处,距离A传感器50 m左右,通过实验计算出A和B、C、D传感器时间差,见表2。
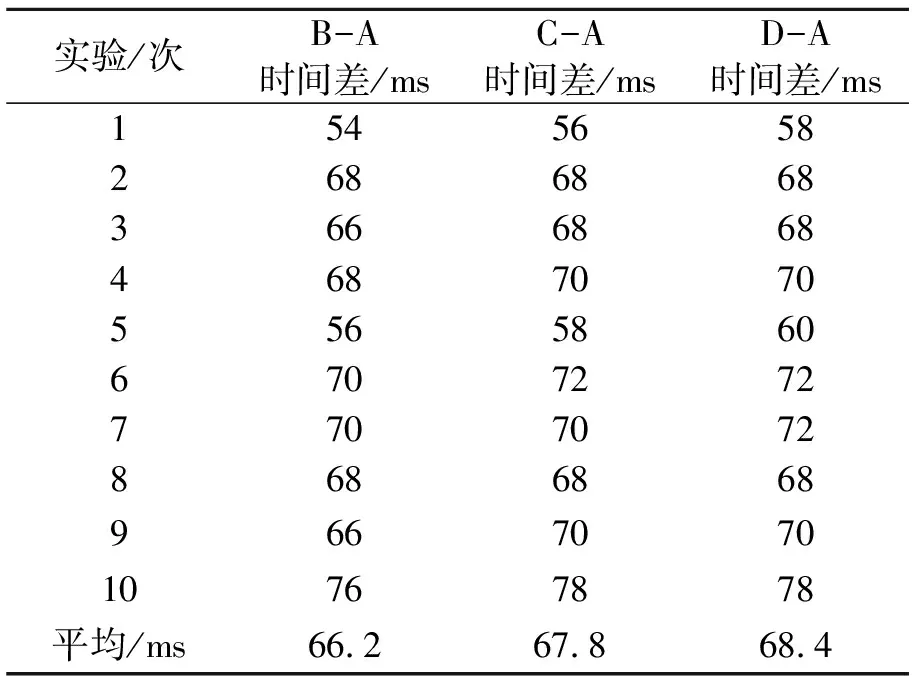
表2 A和BCD传感器时间差
由表2得出,B、C、D和A传感器时间差最大误差差值为4 ms;最大误差距离为2.8 m,误差百分比为5.6%;传感器采集频率为2 ms,最大误差在2个采集点,如果提高采集频率,则泄漏点距离误差会进一步缩小。
3.2 “目”型管道实验
将AF管道、BE管道、CD管道接通,只切断FH管道,使整个管道形成一条未封闭的“目”型管道,管道示意图见图7。
其中,泄漏点如图7所示,B、C、D 3个传感器几乎在同一处,距离A传感器最远50 m左右,最近15 m左右,通过实验计算出A和B、C、D传感器时间差,见表3。
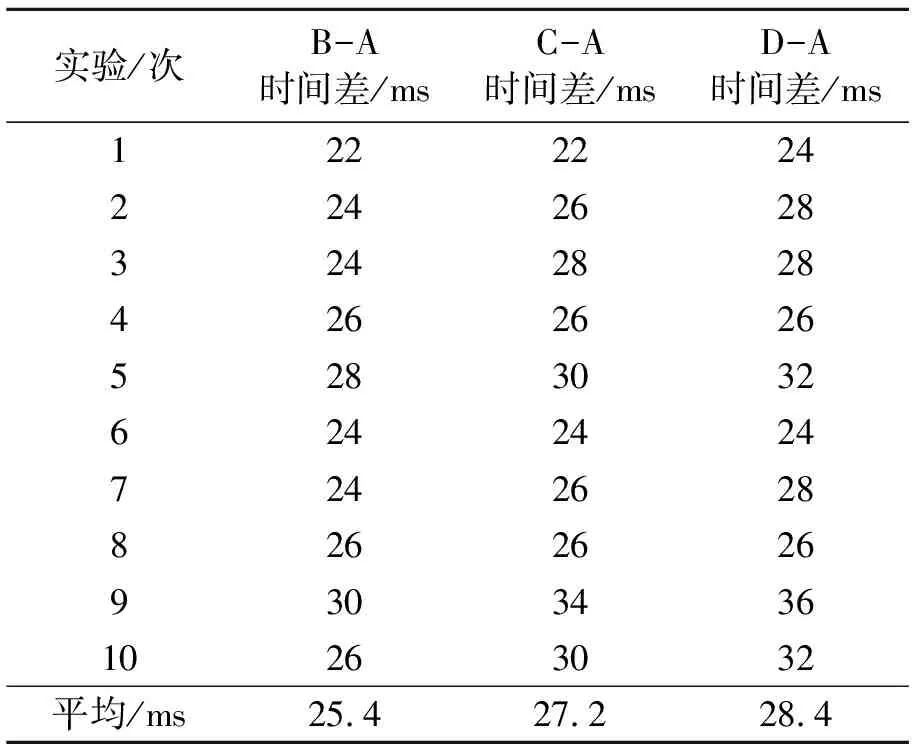
表3 A和BCD传感器时间差
由表3得出,B、C、D和A传感器时间差最大误差值为6 ms,最大误差3个采样点间隔,平均误差为0.8个采样点(开阔水中音波速度为1 450 m/s,对应定位误差最大为8.7 m,平均误差为2.32 m)。
通过以上试验可以看出,本算法对单管道的泄漏检测和定位误差比“目”型管道小。“目”型管道由于环路较多,音波传递的行程多于1条,导致误差相对较大。
4 结论
1)如果传感器通道的谐波干扰(约12 Hz)能够消除,则泄漏点检测方法精度更高。因为干扰小,算法可以从曲线突变的根部进行判断。
2)如果干扰不可避免,而且严重影响曲线突变点的判断,要做一个拟合曲线的算法,能够避免干扰曲线带来的错误,但因为失去了直接从曲线突变的根部进行判断的有利条件(被干扰曲线淹没),只能根据大于谐波干扰幅值的地方取点拟合曲线,然后反推到突变点,误差相对比较大(增加一倍左右)。
3)采样频率较低也是精度不高的一个重要原因,在曲线突变后的上升段,只有几个采样点,曲线的拟合也很难做好,只能做一些近似的假设。
猜你喜欢
电子技术与软件工程(2022年6期)2022-07-07
作文周刊·小学一年级版(2022年24期)2022-06-18
北京航空航天大学学报(2020年10期)2020-11-14
家教世界·创新阅读(2020年2期)2020-04-07
汽车与驾驶维修(维修版)(2020年2期)2020-03-20
雷达学报(2018年5期)2018-12-05
汽车维护与修理(2018年9期)2018-10-31
山东工业技术(2017年23期)2017-11-28
演艺科技(2017年8期)2017-09-25
小天使·一年级语数英综合(2017年1期)2017-02-16