动车组静态称重调平指导参数研究
2019-01-07 12:55杨昕时王伯铭张力波
城市轨道交通研究 2018年12期
杨昕时 王伯铭 张力波
(西南交通大学机械工程学院,610031,成都//第一作者,硕士研究生)
动车组轮(轴)重均衡是保证动车组粘着牵引力和车辆运动性能正常发挥的必要条件。称重试验是动车组编组前的最后一道工序。《CRH2A、B、E 型动车组三级检修规程》规定:动车组单辆静态称重检测轮重差时,差值应小于等于4%[1]。若轮重差不满足要求,可通过调节空气弹簧高度调整阀以及在一系弹簧处加设调整垫片来调整。目前的动车组称重调平是在人工经验指导下完成的,缺乏理论指导。如:文献[2-3]分析了称重工艺的影响因素,根据现场数据总结了调整轮重差的经验原则,并增加了预调整工艺。文献[4]根据经验从工艺角度总结了现场轮重差调整方法,该调整方法存在一定的随机性和盲目性,未能从根本上提出解决方案。文献[5-7]分别研究了轮重调整方法和车体称重方法,研究中尚未将由单个位置调整对整车带来的影响进行量化,仅得到了经验性的指导方案。文献[8]分析了在转向架单个位置加设垫片对其他位置的影响,但并未得出指导调平的理论规律,最终都要依靠算法寻找最优解。
本文通过建立动车组单辆车整体称重理论模型,分析得到称重调平的理论规律,提出了3个调平指导参数以及高度调整阀调平条件,并结合现场数据验证了理论规律的正确性。应用此理论指导现场称重,可以有效避免工人的盲目操作,显著提高了现场称重效率,为计算机编写计算动车组单辆车整体称重调平程序提供了必要的理论支持,同时亦为称重调平的数字化智能化提供了指导方向。
1 现行动车组单辆静态称重过程
将车辆推置于称重轨上,称重轨上有8个载重台,载重台将轮对举升,通过传感器测得各轮重,根据轮重数据指导工人进行调平。调平的方法有两种:一种是在轴箱弹簧处加垫片,一种是调节空气弹簧高度调整阀。由于在轴箱弹簧处加设垫片的操作复杂,因此优先通过调节空气弹簧高度调整阀来调整轮重。工人打开一辆车对角的空气弹簧高度调整阀来调节轮重,轮重数据实时显示在控制室,当轮重差符合要求后,停止调节;若不能调平,则在轴箱弹簧处加设垫片,再调节空气弹簧高度调整阀来调平轮重,如此重复直到调平,若始终不能调平,则该车不合格。
2 动车组静态称重理论模型
2.1 车体垂向受力模型
车体支撑于4个空气弹簧上,其垂向受力简化模型如图1所示。

注:2L——空气弹簧纵向间距;2H——空气弹簧横向间距;N1,N2,N3,N4——空气弹簧支撑力;P——车体所受的重力;ΔX,ΔY——分别为x方向和y方向车体重心偏离形心的距离
图1 车体垂向受力模型
车体所受的支撑力通过调节空气弹簧高度调整阀进行调节,4个支撑力能够调节到的最好状态为载荷最平均分配状态[5]。车体4点载荷调整时,其规律为对角相同,即1位空气弹簧垂向支撑力增大,则对角的4位空气弹簧支撑力也增大,并且增大量相同;另一对角上空气弹簧2、3位的垂向支撑力减小,且减小量与1、4位增大量相等[8]。因此,通常情况下,车体所受的4点支撑载荷如式(1)。
(1)
其中,ΔN(k,h)为与4个空气弹簧状态有关的偏差载荷,可通过调节空气弹簧高度调整阀进行调节,当调整至零时即为载荷最平均分配状态。
2.2 转向架垂向受力模型
将转向架分为构架和轮对,构架的垂向受力模型如图2所示,轮对的受力模型如图3所示。
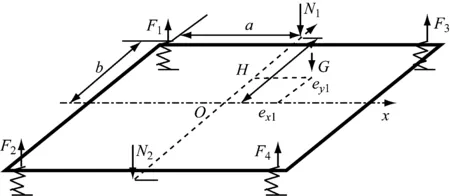
注:2a——轴距;2b——轴箱弹簧的横向间距;G——构架所受的重力;ex1,ey1——分别为x方向和y方向构架重心偏离形心的距离;F1,F2,F3,F4——分别为不同轮对对轴箱的支撑力
图2 构架垂向受力简图
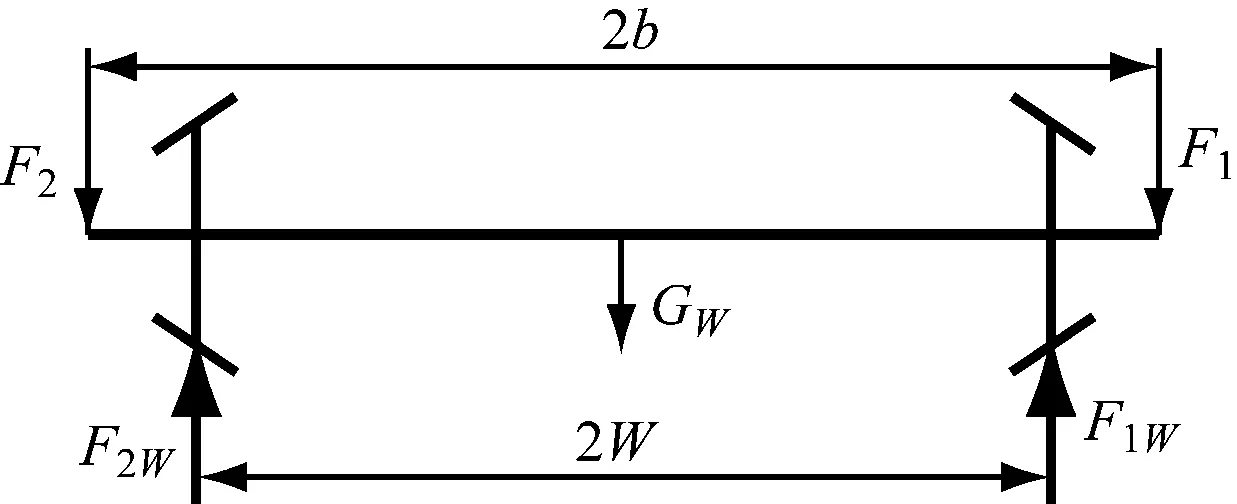
注:GW——轮对所受的重力;2W——轮对的滚动圆中心距;F1W,F2W——轨道对轮对的支撑力
图3 轮对垂向受力简图
根据构架及轮对垂向受力可列出静力学平衡方程,结合4个轴箱变形协调条件可求得转向架4个轮轮重大小FWi(i=1,2,3,4),如式(2)所示。
(2)
式中:
li——轴箱弹簧的初始长度(i=1,2,3,4);
c——轴箱弹簧的垂向柔度,即刚度的倒数。
本文假定所有轴箱弹簧的垂向刚度相同且保持不变。
3 调平指导参数的确立
结合式(1)和式(2)可得,一轴的轮重偏差为:
(3)
同理,可分别列出二轴、三轴、四轴的轮重偏差。
则车辆称重时的轮重偏差可分为以下3部分:
(1) 由空气弹簧引起的偏差ΔS。这部分偏差可以通过调节空气弹簧高度调整阀的方法来减小。
(2) 由轴箱弹簧引起的偏差ΔB1与ΔB2。根据弹簧串联定律可知,将一个刚度为K、原长为L1的弹簧与一个刚度无穷大、原长为L2的弹簧串联,串联后的弹簧刚度为K,原长为L1+L2。因此,在轴箱弹簧处加设垫片,等效于改变轴箱弹簧的原长。因此,这部分偏差可通过在轴箱弹簧处加设垫片来减小。
(3) 由车辆重心横向偏心引起的偏差ΔPy1和ΔPy2,这部分偏差不能通过上述调平方法减小。
令:
(4)
将轮重偏差控制在4%以内,则:
|ΔB1|+|ΔS+ΔPy1|≤4%
(5)
|ΔB2|+|-ΔS+ΔPy2|≤4%
(6)
车辆称重时,希望仅通过调节空气弹簧高度调整阀便能调平,同时要考虑在轴箱弹簧处加设垫片。当仅调节高度调整阀时,ΔS为变量,所以式(4)和(5)所组成的方程组有解时,便说明只调节高度调整阀就能调平。
令:
(7)
将|ΔB1|、|ΔB2|和Δ命名为调平指导参数,则高度调整阀调平条件为:
(8)
当满足上述高度调整阀调平条件时,仅通过高度调整阀即可调平;若不能同时满足,则需分别在前后转向架轴箱弹簧处加设垫片来减小|ΔB1|和|ΔB2|,从而使调平条件满足要求。由于|ΔB1|和|ΔB2|分别能反映前、后转向架的调平情况,为了节约调平时间,降低工艺难度和复杂度,当需要在轴箱弹簧处加设垫片时,工人希望尽量只在一个转向架的轴箱弹簧上加设。为此,可以先比较|ΔB1|和|ΔB2|的大小,再进一步计算能否通过只减小|ΔB1|和|ΔB2|中较大者来满足高度调整阀调平条件。
4 实例分析
通过车辆现场称重可以得出8个车轮的轮重,然后根据轮重可算得3个调平指导参数值。
表1列出了多辆车现场称重数据,并计算出了上述三辆车在称重过程中的调平指导参数(见表2),计算结果证明了理论的正确性。第一辆车调平时发现只调高度调整阀不能够调平,然后在后转向架加设垫片才将车辆调平;第二辆车由于不能只通过调节高度调整阀调平,因此通过在前后转向架上加设垫片,才调平了车辆;为了验证理论的正确性,对于不能只通过调高度调整阀调平的第三辆车进行重心调节,通过调节车体上的配重块,将车体重心向中心移动,当高度调整阀调平条件满足时,再调节高度调整阀,结果证明此时确实不需在轴箱弹簧处加设垫片便能调平。由表1和表2可知:
(1) 根据理论,|ΔB1|和|ΔB2|与转向架轴箱弹簧的状态有关,其值可分别通过在前后转向架轴箱弹簧处加设垫片来改变,与高度调整阀调节无关。而在车辆实际称重中,只调节高度调整阀时,两个参数都有一定的变化,这是由于测量数据时车体并未稳定以及称重台测量误差引起的,其改变的大小远远小于在轴箱弹簧处加设垫片引起的变化值。
(2) 第一辆车不能只通过调高度调整阀调平的原因是,车辆不平是由后转向架的不平造成的。在后转向架上加设垫片,当满足了高度调整阀调平条件后调节高度调整阀便能够调平。
(3) 第二辆车的前后转向架已经比较平,但是由于整辆车重心横向偏心大,导致不满足高度调整阀调平条件,于是还需在前后转向架上加设垫片,当满足高度调整阀调平条件后,便可通过调节高度调整阀调平。
(4) 第三辆车起初不能通过调节高度调整阀调平,经计算,发现其原因是重心偏差相对于第二辆车而言较小。为了验证理论的正确性,通过调节车体上的配重块,将车体重心向中心移动而不在轴箱弹簧处加设垫片,当高度调整阀调平条件满足时再调节高度调整阀,结果证明此时确实不需在轴箱弹簧处加设垫片便能调平。
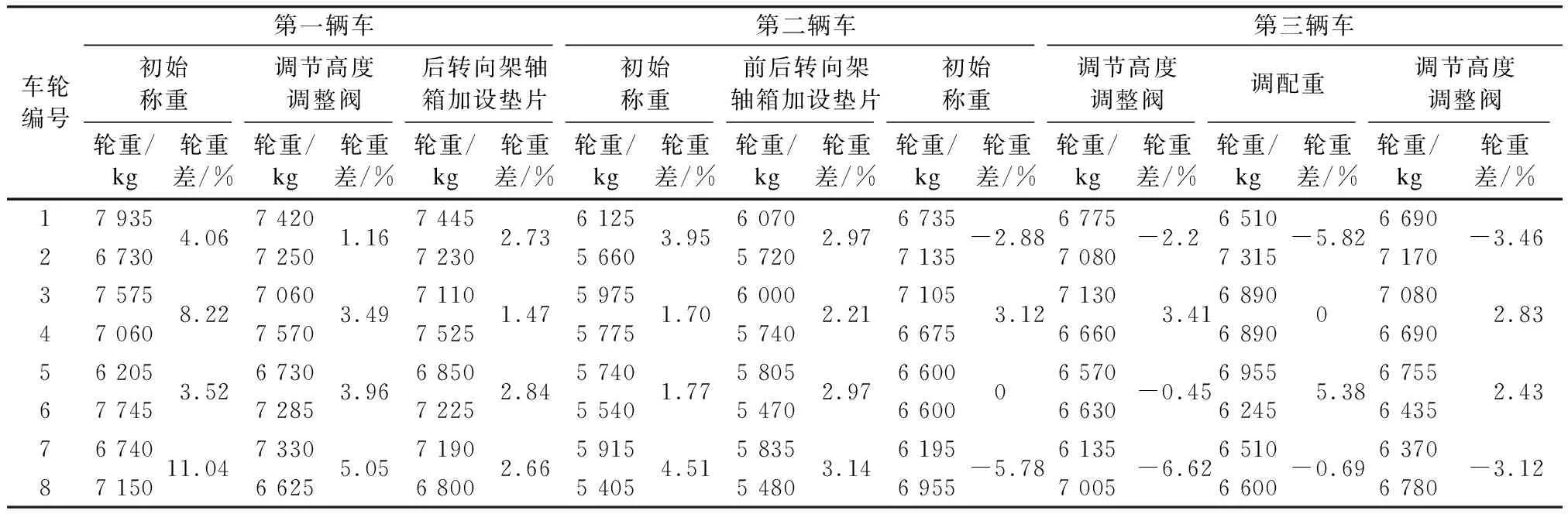
表1 多辆车现场称重数据统计表
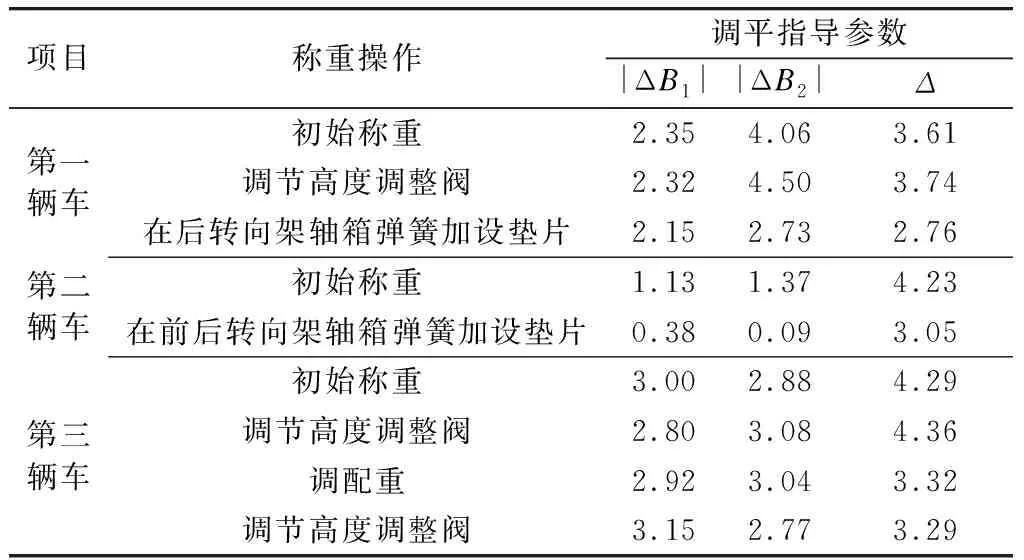
表2 调平指导参数计算表
5 结论
本文通过建立动车组单辆车整体称重模型,提出了3个调平指导参数以及高度调整阀调平条件。3个调平指导参数分别反映了影响动车组单辆车整体称重调平的3个独立因素:前转向架不平、后转向架不平以及车辆重心偏心。结合现场数据验证了高度调整阀调平条件的正确性。在此基础上可以利用调平指导参数来进行判断,并明确指出应在转向架加设垫片以满足调平条件。应用此称重调平规律和3个调平指导参数以及高度调整法调平条件来指导车辆现场称重,可以有效避免工人的盲目操作,显著提高车辆现场称重效率,还为计算机编写计算动车组单辆车整体称重调平程序提供了必要的理论支持,同时也为车辆称重调平的数字化、智能化提供指导方向。
猜你喜欢
哈尔滨轴承(2021年1期)2021-07-21
机械工程与自动化(2020年4期)2020-08-25
制造技术与机床(2019年12期)2020-01-06
森林工程(2018年4期)2018-08-04
制造技术与机床(2017年8期)2017-11-27
航天工业管理(2017年4期)2017-05-12
新乡学院学报(2016年6期)2016-12-01
光学精密工程(2016年4期)2016-11-07
铁道运营技术(2015年3期)2015-12-23
橡胶工业(2015年8期)2015-07-29