
三维激光扫描在地铁车站管线建模中的应用
2019-01-05 06:19:50尤旭东上海申通地铁集团有限公司上海200070
建筑科技 2018年3期
尤旭东(上海申通地铁集团有限公司,上海 200070)
地铁改造过程中常常碰到原有设计图纸缺失,或者实际施工管线位置同设计图纸存在一定差异,如根据原图纸进行改造设计则会引起很大问题。为此需要对既有结构管线重新进行测绘建模,获得实际的情况。传统的方法首先采用经纬仪、全站仪、水准仪等手段对管线进行现场测量,然后将测量后的信息记录下来,最后按照记录的信息在电脑 CAD 环境下绘图出来,该方法效率低下,而且容易出错。随着三维激光扫描仪的出现,借助三维扫描技术可以一次性快速地获得结构管线的三维坐标信息,然后借助后处理软件可以快速地将三维坐标信息导入 CAD 环境下自动生成三维模型或图纸,大大提升了测绘效率。
1 工程项目背景
轨道交通 13号线马当路站位于马当路与徐家汇路交界口处,车站需要进行结构改造施工,改造前需要对车既有站顶部的风管、水管和电缆线路等进行建模,最终形成现场结构的真实三维模型,并验证了模型的准确性。
2 三维激光扫描方案
2.1 方案介绍
三维激光扫描技术克服了传统测量技术的局限性,采用非接触主动测量方式直接获取高精度三维数据,能够对任意物体进行扫描,且没有白天和黑夜的限制,快速将现实世界的信息转换成可以处理的点云数据,最终将获取的点云数据构建成实体三维几何模型。本项目技术方案分为 4 个步骤进行:数据采集、点云拼接、管线建模和现场检核。
2.2 数据采集
2.2.1 扫描设站
设备采用 FARO 扫描仪采集,根据车站面积大小拟架设 40 站。对于管线分岔或者变径等关键位置,我们将单独架站进行精确扫描,并将扫描结果导入到现场配备的 PC 机中,第一时间查看点云质量和关键位置的信息,避免后期返工重测。数据采集关键内容是靶球布设和扫描参数设置,靶球布设决定了点云数据后期的配准精度,扫描参数决定了扫描数据的质量与扫描效率。
FARO 扫描仪自身无法定向定位,因此各站扫描数据是相互独立的,为了将所有数据配准到统一坐标系下,需要在现场布置靶球,以此作为两站数据的公共部分,实现数据的配准,因此数据配准质量取决于靶球的布设方法和靶球的测量精度。本项目采用固定式靶球布设法,在布设靶球时,综合考虑测站间距(控制在 12m左右)和测站位置(每两个立柱间架设一站),大致将其布置成等边三角网的结构,同时保证每相邻两站能同时扫描到 3 个以上的公共球,以此来保证靶球的测量精度和数据配准的质量。
2.2.2 参数设置
点云数据获取需经过“扫描仪安置→扫描参数设置→扫描→纹理影像数据采集”等过程。其中扫描参数的设置至关重要,直接影响扫描精度和数据采集的效率。扫描参数主要包括测站间距与扫描分辨率。
(1)测站间距设置 :在数据采集时要布设多个测站分别进行扫描,测站间距越大,所需测站总数就越少,扫描时间就越短,但是过大的测站间距会导致点云质量下降,测量误差也会变大。另外,现场扫描时车站顶部结构复杂,遮挡严重,如果站间距过大,会导致所需的管线被遮挡,造成原始点云数据缺失,影响了后期的数据处理和建模工作。因此,综合考虑扫描精度和数据采集的效率,本项目测站间距约定为 12 m,即每两个车站立柱之间架设一个测站。同时,为了更清楚、准确地采集到真实的管线点云数据,对于管线分岔或者变径等关键位置,将另外单独架站进行精确扫描。
(2)分辨率设置:FARO 扫描仪的分辨率有“1/1、1/2、1/4、1/5、1/8、1/16”6 档可选,分辨率设置越高,点云的密度越大,被扫描物体的细节就越清楚,但扫描所需时间也大大增加。FARO 扫描仪的不同分辨率对应点间距见表 1。如上文所述,站间最佳距离为 12 m,则点离扫描仪最远距离为 6 m,因此,为确保最高的扫描效率,可取 1/5分辨率,此时 6m处的点间距约为 4.6 mm,若将扫描质量控制为 4 X,单站的测量时间约为 5 min 33 s。

表1 FARO Focus 3D扫描仪分辨率
2.2.3 作业流程
在布设好靶球、设置好仪器参数后,便可进行单站独立扫描,具体三维激光扫描仪外业操作流程如图 1 所示。Stn 1 为扫描的起始站,该站扫描结束后,搬至 Stn 2,Stn 2 为中间站,因此 Stn 2 架站时要考虑与 Stn 1 有 3 个以上的公共靶球,且与 Stn 3 有 3 个以上的公共靶球,中间站架设仪器时均要保证与相邻站有 3 个以上的公共靶球,并且要保证该站扫描元素(管道、柱墙等)的完整性,在特殊结构(如管道变径、变向)处,可适当增加测站,以方便后期拼接。以此类推,直到最后一站 Stn 25。Stn 1 至 Stn 25 形成一个闭合线路,以此来保证整个结构完全拼接。
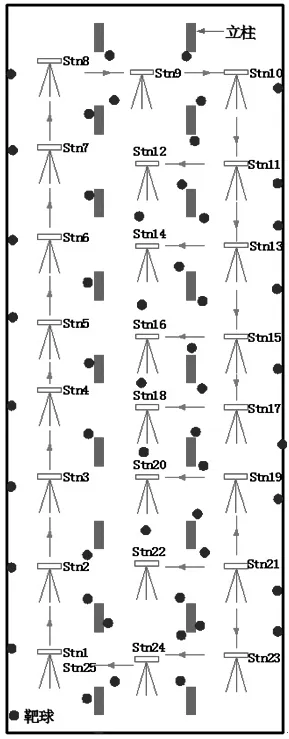
图1 扫描设站及作业流程
2.3 点云预处理拼接
在扫描过程中,受激光扫描仪视场角的限制,每站扫描时只能获取当前扫描仪坐标系下的点云数据,车站狭长形的特征也限制了扫描的有效距离,这决定了不可能只通过一次扫描就得到整个车站顶部管线的坐标及属性数据。因此,必须分站对其进行扫描,并将多个站点下获取的点云进行拼接,得到一个统一坐标系下的三维数据点集,这就涉及到点云拼接问题。
本案例采用 FARO SCENE 软件进行拼接处理,将采集到的单站独立点云数据导入到 SCENE 软件中,并对点云数据进行过滤、平滑、补偿等操作进行数据去噪,通过自动对象识别技术自动识别定位靶球,并依次编号,最后通过注册扫描实现点云数据的拼接。拼接后的点云数据已经在同一坐标系下,此时可查看点云拼接的精度,如果发现某一站拼接精度偏大,可通过人工识别靶球的方式重新更新扫描,进行优化平衡,使拼接精度达到最优。
2.4 管线建模
Galaxy-Eye 是一款快速大空间三维点云处理软件,也是一款专业的管线建模软件。在前面采用 FARO SCENE 预处理后的点云数据可以直接导入该软件内,实现管线自动拟合,后期采用需要人工对照点云数据,对拟合结果进行精确地检查和完善,拟合成果见图 2、图 3。
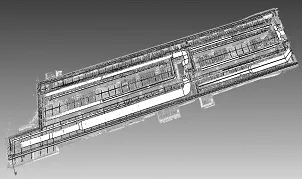
图2 车站整体管线模型与三维点云图

图3 管线CAD模型图
2.5 模型和现场复核对比
为了验证三维扫描技术的准确性,将扫描建立的模型同实际对比,图 4 选取了两组对比效果。
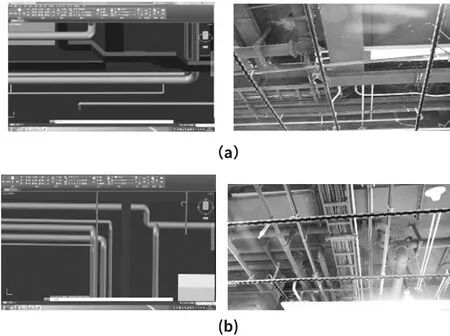
图4 扫描建立的模型同实际对比
3 结 语
(1)采用三维激光扫描仪可以快速地对结构及管线进行扫描建模,较传统方法有很大优势。
(2)三维激光扫描仪扫描设站需要考虑场地间距、分辨率、精度综合因素设定。
(3)靶标设置较为关键,数量和位置设置决定最终模型效果的精度和准确性。
(4)采用三维激光后处理软件建立的模型同实际误差较小,可以反映真实的物体模型。
猜你喜欢
地理空间信息(2022年11期)2022-11-26 05:47:02
数学物理学报(2019年3期)2019-07-23 01:15:40
家庭影院技术(2018年9期)2018-11-02 05:31:32
测绘学报(2018年10期)2018-10-26 06:12:16
城市勘测(2018年1期)2018-03-15 03:37:02
自动化学报(2017年5期)2017-05-14 06:20:52
成都信息工程大学学报(2017年6期)2017-03-16 03:04:32
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27 14:02:34
现代营销·经营版(2015年3期)2015-04-20 06:46:58
地理空间信息(2013年4期)2013-09-28 07:42:12
