基于开关磁阻电机的储能飞轮充放电控制
2019-01-04 09:55:38朱彦波石朋飞李光军
储能科学与技术 2019年1期
朱彦波,石朋飞,李光军
基于开关磁阻电机的储能飞轮充放电控制
朱彦波1,石朋飞2,李光军1
(1北京航空航天大学机械工程学院,北京 100089;2北京泓慧国际能源技术发展有限公司,北京 101300)
根据开关磁阻电机的特性建立了储能飞轮的数学模型,采用Matlab/Simulink仿真分析了系统最大允许电流和电机开断角对系统控制性能的影响。设计了系统充放电控制方式,仿真结果表明,采用电流斩波与角度位置相结合的速度电流双闭环控制方式进行充电控制,采用电流斩波控制的电压电流双闭环控制方式进行放电控制,系统充放电过程具有响应速度快、稳态精度高的特点。最后通过仿真验证了开关磁阻式储能飞轮用作不间断电源的可行性。
开关磁阻电机;飞轮;充放电
储能飞轮系统作为清洁能源储存技术越来越受到研究学者的重视[1]。电机及其控制器是储能飞轮系统的重要组成部分。目前研究和应用较多的是永磁同步电机[2],然而,对于大功率UPS用储能飞轮,永磁体的存在,一方面降低了电机结构的坚固性和可靠性,一方面使得飞轮系统造价较高。开关磁阻电机(SRM)利用“磁阻最小”原理实现电机的旋转与能量转换,定、转子均无永磁体且可将电机布置在飞轮最大外圆处,结构简单紧凑,适合高速运行且成本较低,非常适合作为大功率UPS型储能飞轮的驱动电机使用[3-4]。
SRM采用的是双凸极结构,目前的研究方向大多集中在作为调速系统的电动机使用[5-7]和减小由于双凸极结构导致的转矩脉动方面[8-9],作为储能飞轮系统驱动电机方面的研究还不完善[10]。本文在Simulink环境中搭建了开关磁阻电机储能飞轮系统模型,仿真分析了系统最大允许电流和开断角对系统电流、转矩、转速的影响,在此基础上提出了开关磁阻电机储能飞轮充放电控制方式并进行了仿真验证。
1 开关磁阻式储能飞轮系统数学模型和控制原理
1.1 SRM数学模型
SRM的数学模型主要由电磁方程、机械方程、机电联系方程三部分组成。
电磁方程
机械方程

式中,e为电磁转矩;L为负载转矩;为阻尼系数;为转子角速度;为转动惯量。
机电联系方程

由于SRM的双凸极结构,电感和转子位置,和相电流之间存在严重的非线性关系。在对SRM定性分析时,可以选择SRM的理想线性模型[11],即假定电感仅与转子位置有关而与相电流无关,由此式(3)可简化为

1.2 开关磁阻式储能飞轮系统控制原理
2 开关磁阻式储能飞轮系统控制模型
SRM储能飞轮系统主要由控制器、功率变换器、电源、负载、集成了SRM和电流、电压、转速传感器的飞轮组成。储能飞轮系统的控制主要由控制器和功率变换器实现,其中功率变换器采用三相不对称半桥拓扑结构,主要作用有:①通过功率电子器件的开通或关断控制绕组中电流的大小;②为绕组提供续流回路;③控制飞轮处于储能状态、空闲状态或者释能状态。根据飞轮储能的工作原理可知,系统控制器主要通过电流、电压、转速反馈量来控制系统处在正确的运行状态。系统结构如图1所示。
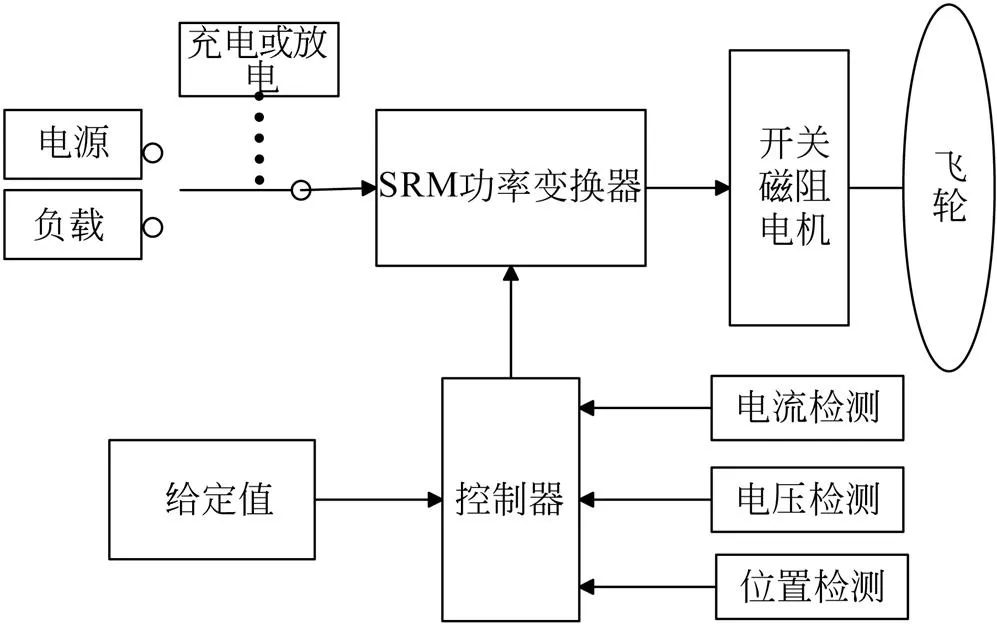
图1 开关磁阻式储能飞轮系统结构
本文选用Matlab/Simulink自带的6/4极SRM模型为驱动电机建立了SRM储能飞轮系统仿真模型,对仿真参数进行设定:给定电机转速=5000 r/min,电压=220 V(DC);对电机参数设定:定子绕组s=0.05 Ω,摩擦系数=0.01 N·m·s,转动惯量=0.1 kg·m2(集成了飞轮的转动惯量)。仿真模型如图2所示。
2.1 电流对系统性能的影响
电机启动和低速运行时,电机转速很小,所以反电动势也很小。根据式(1)可知,≈,由于单相定子绕组s=0.05 Ω,所以电流很大。但是系统可以承受的最大电流是有限的,所以在电机启动和低速运行时必须采取限流措施限制电机相电流的 大小。
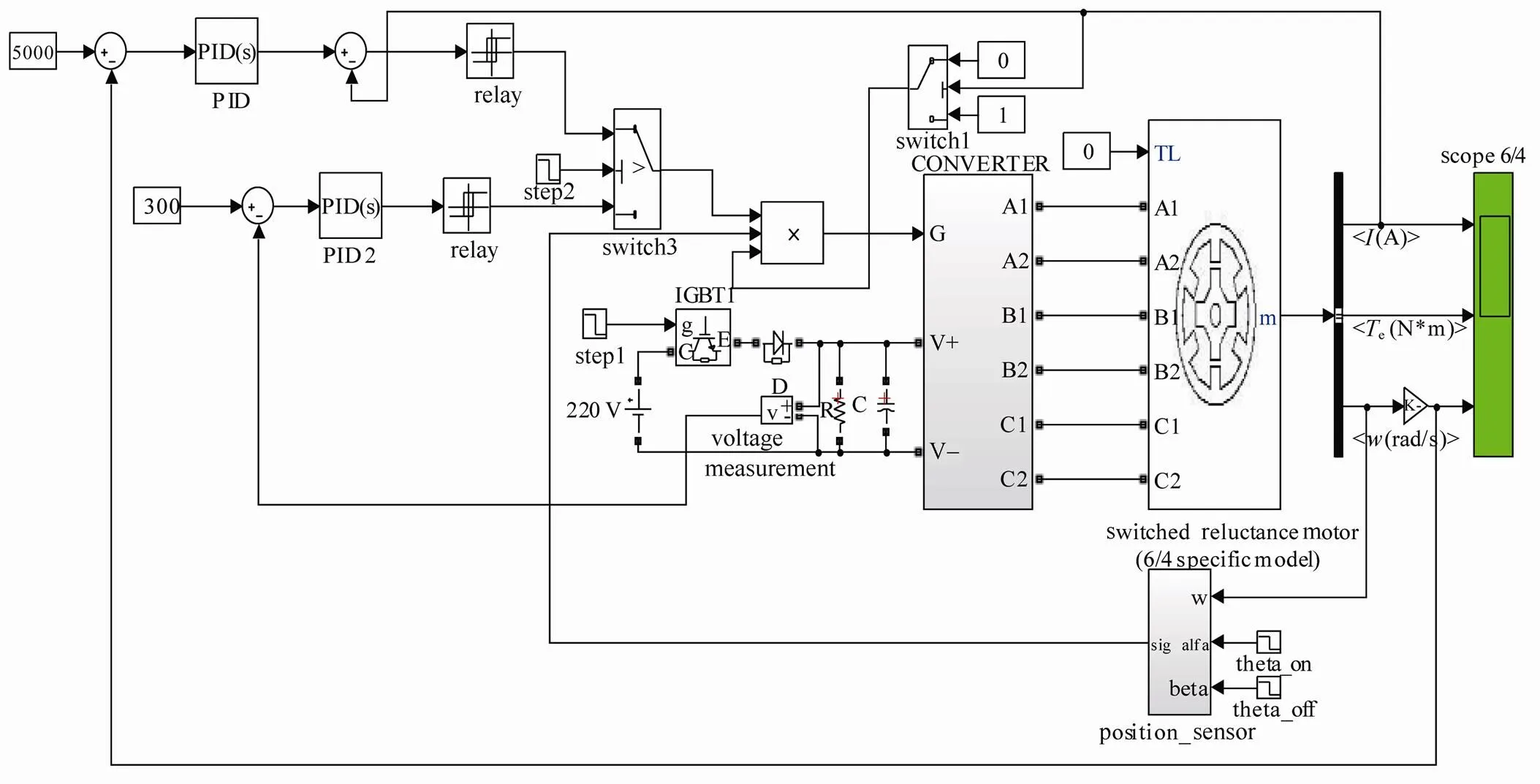
图2 开关磁阻式储能飞轮系统仿真模型
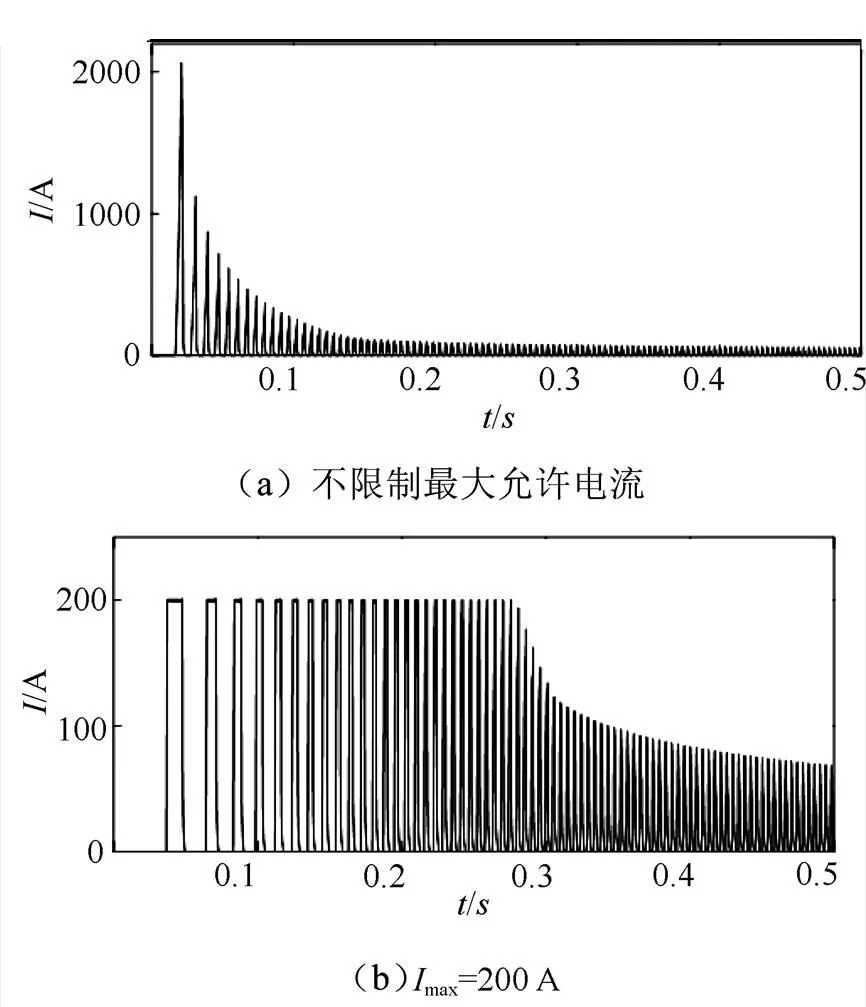
下文通过建立仿真模型来模拟系统最大允许电流对系统性能的影响。仿真参数设置:固定SRM开通角turn_on=40°,关断角turn_off=80°。系统允许的最大电流值分别取为①不限制电流值;②200 A;③50 A,转速、转矩、电流仿真结果如图3~5所示。
图3~5分别为系统不同最大允许电流下电机起动转速图、转矩图和相电流波形图。由图5(a)可知,若不限制系统最大允许电流,在电机启动瞬间,系统相电流达到了2000 A以上,这在实际应用中是不允许的。由图3可知,当不限制系统电流值的大小时,电机有最大的加速度,可以以最短的时间达到要求转速。但是从图4可以看出,不限制最大允许电流的情况下,虽然有较大的转矩和加速度,但电机转矩波动十分剧烈,在0.05 s时间里就从1300 N·m下降到了不到400 N·m。max=200 A时,由图5(b)可知在0~0.3 s时间里电机相电流被限制在了200 A以下,转矩波动较小,转速上升比较平稳。当max=50 A时,在0~0.5 s时间里电机相电流被限制在了50 A以下,电机加速度较小,转速上升较慢,转矩和转矩波动都较小。
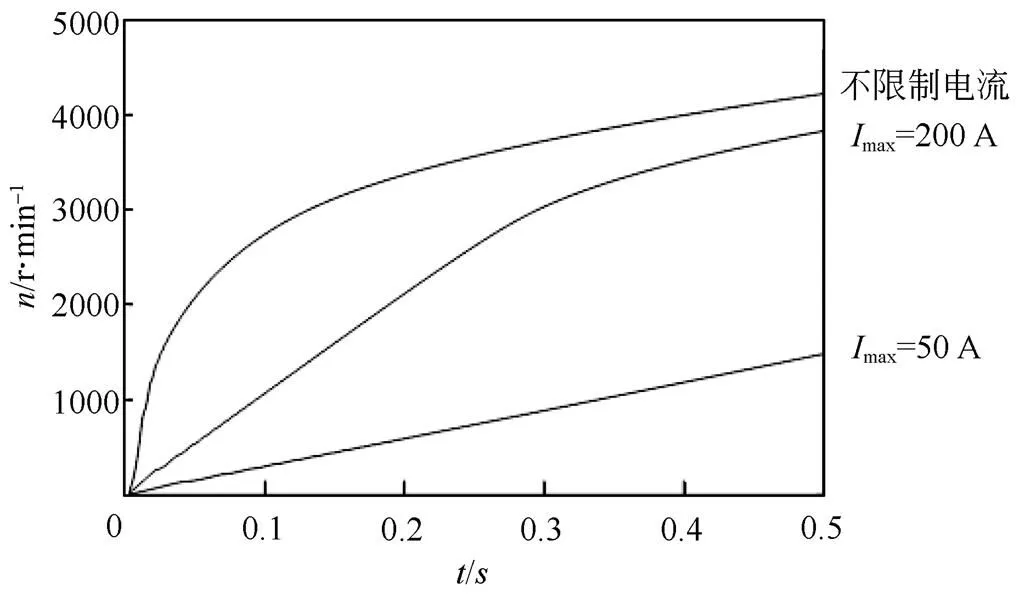
图3 不同最大允许电流下的电机启动转速

图4 不同最大允许电流下的电机启动转矩
由以上分析可知,系统最大允许电流的取值对相电流的波形、电机转矩的大小和波动程度、电机加速度的大小都有很大的影响。取值越大,电机加速度越大,达到要求转速的时间越短,但同时转矩波动越大,对硬件的要求越高。
2.2 开断角对系统性能的影响
开通角和关断角直接决定了SRM转矩的正负和作用时间的长短,进而影响系统性能。笔者将系统最大允许电流设为200 A,依据开通区间的大小和位置,开通角和关断角取了三组不同值①turn_on=40°,turn_off=90°;②turn_on=45°,turn_off=75°;③turn_on=55°,turn_off=65°对系统进行仿真,仿真结果如图6、图7所示。
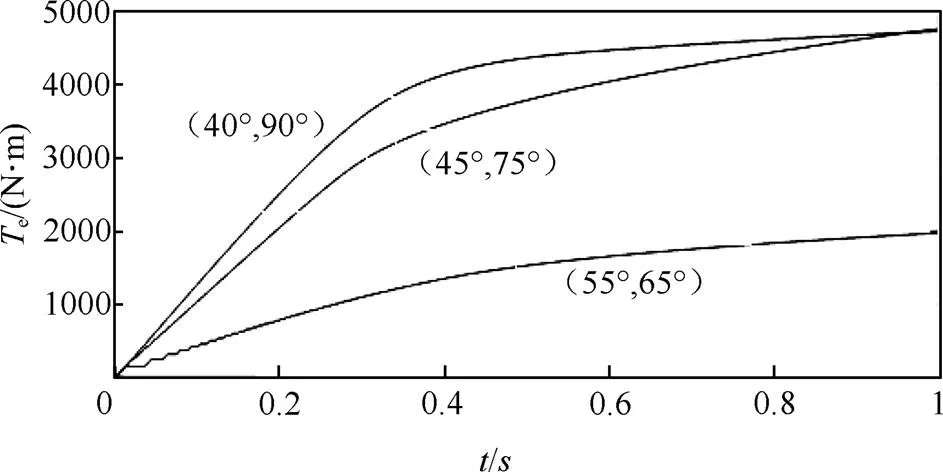
图6 不同开断角下的电机转速

图7 不同开断角下的电机转矩
图6、图7分别展示了不同开断角控制下的电机转速图和电机转矩图,在0~0.4 s期间,开断角为(40°, 90°)时系统有最大的加速度,而在0.4~1 s期间,开断角为(45°, 75°)时系统的加速度最大并且速度在接近1 s时实现了反超,这从它们的转矩图上可以得到解释。如图7所示,在电机启动初期,开断角为(40°, 90°)时拥有较大转矩和较长的转矩作用时间,但在0.4 s之后,电机转矩小于其他两组,且出现了负转矩的情况。由图6和图7(c)可以看出由于SRM开断角为(55°, 65°)时开通区间太小,转矩作用时间太短,电机转速上升缓慢,1 s时只有2000 r/min。
由上面的分析可知,SRM电机的开断角对电机的性能有着重要的影响,应在合理的区间选取开断角,避免开通区间过小造成电机升速过慢,也要避免开通区间选取过大产生负转矩。
3 开关磁阻电机储能飞轮系统控制方式研究
根据以上仿真结果,以电流和开断角为控制变量,分别设计了开关磁阻式储能飞轮系统充电控制方式和放电控制方式。
图8为SRM储能飞轮系统充电控制方式,外环采用速度闭环控制,内环依据电机转速大小采用不同控制方式。图中所示电流斩波控制即当SRM相电流超过系统最大允许电流时关闭功率开关管;电流滞环控制也是电流斩波控制的一种,作用是将SRM相电流保持在目标电流*附近,误差取决于选取的滞环宽度。电机转速小于基速b时,电机反电动势小,由于绕组电阻很小,电流将会很大,采用电流斩波和电流滞环相结合的控制方式,可以将电流限制在一定范围内。电机转速大于基速b时,由于电机反电动势较大,绕组的电流上升较慢,为了提高系统控制性能,本文采用固定关断角75°,调节开通角的角度位置控制方式。
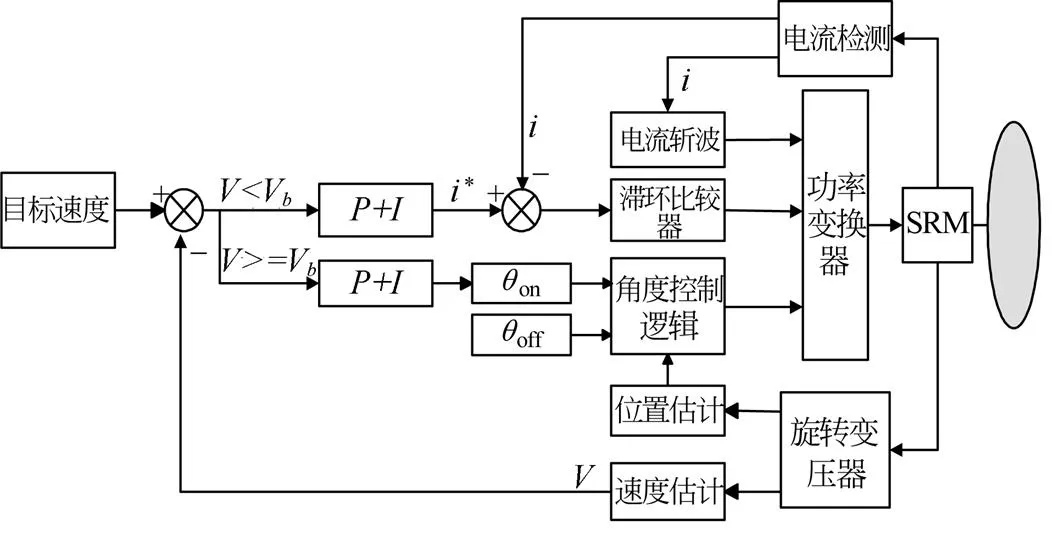
图8 开关磁阻式储能飞轮系统充电控制方式

图9 开关磁阻式储能飞轮系统放电控制方式
图9为SRM储能飞轮系统放电控制方式。由前面分析可知,系统放电时,SRM开断角位于相绕组电感下降区域,此时,电机旋转电动势与相电流方向一致,电流将迅速上升。采用外环电压环、内环电流环的双闭环控制可以在稳定输出电压的同时将系统电流限制在一定范围内。
在Simulink环境下建立了上述控制方式的SRM储能飞轮系统控制模型,如图10所示。电机充电时电源电压220 V(DC),系统最大允许电流取200 A,滞环宽度±1 A,飞轮转动惯量=0.1 kg/m2,充电阶段电流斩波控制时,电机开、断角分别取为45°、75°,角度位置控制时固定关断角75°;放电控制时电机开、断角分别取为0°、35°。0~1.5 s为充电阶段,充电时飞轮目标转速5000 r/min;1.5~2.5 s为放电阶段,放电时目标电压300 V,负载电阻 100 Ω。仿真结果如图11~13所示。

图10 开关磁阻式储能飞轮系统充放电控制仿真模型

图11 充放电过程飞轮转速

图12 充放电过程相电流
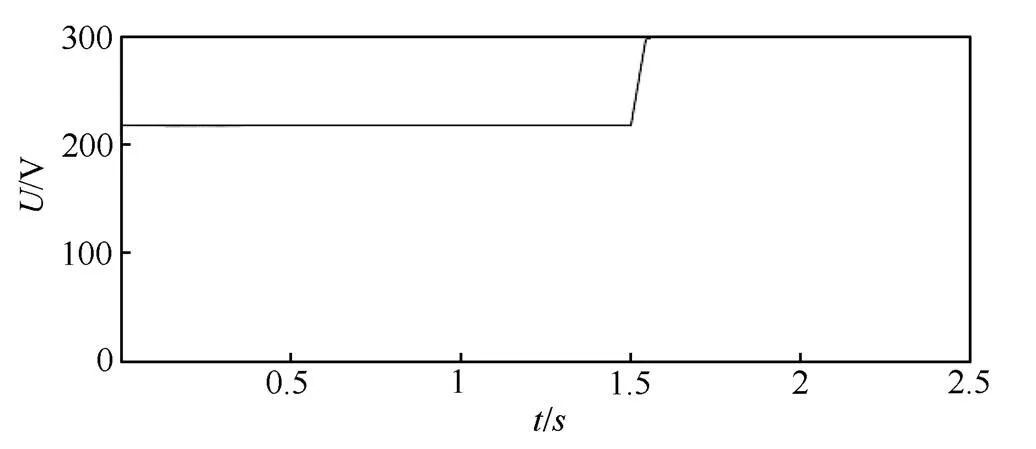
图13 充放电过程电压
由图11可知,飞轮初始转速为0,在充电过程中,飞轮转速平稳上升,在1.2 s时达到要求转速5000 r/min,并在1.2~1.5 s期间保持转速稳定,最大稳态偏差5 r/min;在放电开始时,飞轮转速迅速下降,当放电电压达到要求值时,飞轮转速降速变缓。由图12可知电机在启动初期和放电初期绕组电流值较大,但都被电流斩波控制限制在允许范围内。由图13可知在1.5 s时系统放电,放电电压在约0.1 s后达到并稳定在300 V,稳态偏差在2%以内,基本满足工程实践要求。
开关磁阻式飞轮系统用作不间断电源(UPS)仿真实验:在电源-负载系统中加入开关磁阻式储能飞轮系统,当系统断电时,飞轮可以将存储的动能转化为电能释放出来供负载使用。仿真参数如下:负载电阻100 Ω、额定电压120 V、飞轮转动惯量0.2 kg·m2、初始时飞轮转速700 rad/s,在1 s时主电源断电,图14(a)、14(b)分别为未加入飞轮和加入飞轮时负载两端电压变化波形。

图14 系统突然断电时负载端电压波形
由图14(a)可知系统未加入储能飞轮情况下,主电源断电时负载两端电压迅速下降到0,系统将停止工作;由图14(b)可知系统在加入了储能飞轮情况下,当主电源断电时负载两端电压只有轻微波动,负载仍可以继续正常工作。
4 结 论
本文根据SRM特性建立了SRM储能飞轮系统仿真模型,仿真分析了系统最大允许电流和电机开断角对系统性能的影响。研究发现系统最大允许电流越大,到达要求转速或电压的时间越短;开断角需要在一定区间选取,过大或过小都对系统性能有不利影响。在此基础上设计了SRM储能飞轮系统充、放电控制方式,仿真结果表明提出的控制方式可以使系统充放电过程响应速度快,转速和电压超调小,稳态精度高。最后仿真验证了开关磁阻式储能飞轮用作不间断电源的可行性,对于SRM储能飞轮系统在工业系统中的应用具有参考价值。
[1] AWADALLAH M A, VENKATESH B. Energy storage in flywheels: An overview[J]. Canadian Journal of Electrical & Computer Engineering, 2016, 38(2): 183-193.
[2] YOU D J, JANG S M, LEE J P, et al. Dynamic performance estimation of high-power FESS using the operating torque of a PM synchronous motor/generator[J]. IEEE Transactions on Magnetics, 2008, 44(11): 4155-4158.
[3] 王路生, 宋受俊, 王琛, 等. 开关磁阻电机储能飞轮系统及其在姿控应用中的仿真[J]. 中国科技论文, 2013, 8(8): 768-772.
WANG L S, SONG S J, WANG C, et al. Flywheel energy storage system of switched reluctance motor and simulation of its application in attitude control application[J]. China Sciencepaper, 2013, 8(8): 768-772.
[4] 孙会琴, 刘志勇. 基于Simulink的四相开关磁阻电机速度控制系统仿真[J]. 长江科学院院报, 2014, 31(1): 81-84.
SUN H Q, LIU Z Y. Simulation of speed control system for four phase switched reluctance motor based on Simulink[J]. Journal of Yangtze River Scientific Research Institute, 2014, 31(1): 81-84.
[5] 纪良文. 开关磁阻电机调速系统及其新型控制策略研究[D]. 杭州: 浙江大学, 2002.
JI L W. Switched reluctance motor speed control system and its new control strategy[D]. Hangzhou: Zhejiang University, 2002.
[6] 宋建国, 许灵, 牟蓬涛. 基于Matlab 12/8极开关磁阻电机控制系统仿真[J]. 电力电子技术, 2017, 51(2): 75-77.
SONG J G, XU L, MU P T. Simulation of control system for pole switched reluctance motor based on Matlab 12/8[J]. Power Electronic Technology, 2017, 51(2): 75-77.
[7] 何林, 邢树华, 高洁, 等. 开关磁阻电机调速系统的建模与仿真[J]. 电测与仪表, 2011, 48(9): 22-25.
HE L, XING S H, GAO J, et al. Modeling and simulation of switched reluctance motor speed control system[J]. Electrical Measurement & Instrumentation, 2011, 48(9): 22-25.
[8] 潘再平, 罗星宝. 基于迭代学习控制的开关磁阻电机转矩脉动抑制[J]. 电工技术学报, 2010, 25(7): 51-55.
PAN Z P, LUO X B. Torque ripple suppression of switched reluctance motor based on iterative learning control[J]. Transactions of China Electrotechnical Society, 2010, 25(7): 51-55.
[9] XUE X D, CHENG K W , HO S L. Optimization and evaluation of torque-sharing functions for torque ripple minimization in switched reluctance motor drives[J]. IEEE Transactions on Power Electronics, 2009, 24(9): 2076-2090.
[10] 邢向上, 姜新建. 储能飞轮系统电机及其控制器概述[J]. 储能科学与技术, 2015, 4(2): 147-152.
XING X S, JIANG X J. An overview of the motor and its controller in the flywheel energy storage system[J]. Energy Storage Science and Technology, 2015, 4(2): 147-152.
[11] 张云, 王知学, 付东山, 等. 关断角优化的开关磁阻电机高速控制[J]. 电气传动, 2017, 47(3): 27-31.
ZHANG Y, WANG Z X, FU D S, et al.High speed control of switched reluctance motor with turn off angle optimization[J]. Electric Drive, 2017, 47(3): 27-31.
[12] 方红伟, 褚会敏, 肖朝霞. 开关磁阻电机储能飞轮系统模糊控制[J]. 沈阳大学学报(自然科学版), 2015, 27(4): 289-295.
FANG H W, CHU H M, XIAO Z X. Fuzzy control of flywheel energy storage system of switched reluctance motor[J]. Journal of Shenyang University (Natural Science Edition), 2015, 27(4): 289-295.
Charge and discharge control of a switched reluctance motor based flywheel
ZHU Yanbo1, SHI Pengfei2, LI Guangjun1
(1College of Mechanical Engineering, Beihang University, Beijing 100089, China;2Beijing Honghui International Energy Technology Development Co. Ltd., Beijing 101300, China)
A mathematical model was developed for a flywheel system based on the characteristics of a switched reluctance motor (SRM) and simulated under a Matlab/Simulink environment. The influence of the maximum permissible current and the breaking angle on the system performance was analyzed. Based on the analyses, a control mode of charging and discharging of the system was designed. During charging, the current chopper control and angle position control were adopted; whereas in discharging, the current chopper control was adopted. The simulation results showed that the charging and discharging processes had the characteristics of a fast response speed and a high steady state precision with the proposed control method.Finally, the feasibility of using SRM based flywheel as an uninterruptible power supply was verified by simulation.
switched reluctance motor; flywheel; charge and discharge
10.12028/j.issn.2095-4239.2018.0156
TM 352
A
2095-4239(2019)01-155-07
2018-08-28;
2018-09-30。
国家重点研发计划项目(2018YFB0905500)。
朱彦波(1992—),男,硕士研究生,研究方向为储能飞轮充放电控制,E-mail:Sttzxs@163.com;
李光军,硕士生导师,研究方向为储能飞轮技术,E-mail:ligj@honghuienergy.com。
猜你喜欢
防爆电机(2023年6期)2023-11-30 03:05:28
新型工业化(2021年8期)2021-10-23 10:27:10
电子与封装(2021年7期)2021-07-29 10:58:48
防爆电机(2021年4期)2021-07-28 07:42:46
模具制造(2019年7期)2019-09-25 07:30:00
中国自行车(2017年11期)2017-04-04 02:51:30
电子设计工程(2017年20期)2017-02-10 03:40:05
校园英语·中旬(2015年7期)2015-08-10 01:35:27
电机与控制应用(2015年1期)2015-03-01 03:49:08
意林(2014年1期)2014-07-05 05:54:04