高层建筑施工中塔吊的人工智能化研究★
2019-01-04 06:52崔英豪方光秀
山西建筑 2019年1期
崔英豪 方光秀
(延边大学工学院,吉林延吉 133002)
0 引言
随着近几年人工智能的快速发展,各式各样的人工智能机器人融入了我们的日常生活。无人驾驶汽车的发展,自1992年中国第一辆真正意义上的无人驾驶汽车诞生,到2000年,国防科技大学研制的第4代无人驾驶汽车试验成功[1],再到如今福特公司准备在2021年,在美国公路上投放大量无人驾驶汽车,无人驾驶汽车的技术越来越完善。如果能将无人驾驶汽车的环境感知和导航定位技术也应用到建筑行业的塔吊上,可在未来通过人工智能预防塔吊之间的起重臂杆碰撞和自动吊取、吊物等工作。但是,关于塔吊的人工智能化方面,还未有深入的研究。目前,我国在塔吊安全的发展前景上,有着通过云计算和物联网来监控塔吊运行状况的技术[2]。因此,本文通过对无人驾驶汽车环境感知和导航定位技术的研究,将其理论方法运用到建筑施工塔吊中,使塔吊起重臂杆防碰撞和吊取货物的工作通过人工智能完成。
1 人工智能技术
1.1 人工智能概念
人们对人工智能印象最深刻的记忆应该是在2016年3月,当时AlphaGo对战围棋九段棋手李世石,将人工智能拉入了公众视野,成为2016年度最热门的话题。近年来,人工智能迅速发展,在日常生活中也能遇到人工智能的技术,例如扫地机器人,已经慢慢融入人们的生活当中。人工智能是通过大量的数据研究,运用计算机模拟人的一些思维过程的行为,并做出与人类智能相似反应的智能学科。
1.2 建筑塔吊人工智能应用领域的提出
人工智能的基础领域有如下专门领域:1)知识获得;2)基础知识;3)探索、推论;4)视觉、语言理解等。
本文通过对人工智能的基础领域研究,提出了适合建筑施工塔吊的人工智能应用领域,如图1所示。

图1 建筑塔吊的人工智能应用领域树状图
2 人工智能领域研究成果分析
2.1 国内研究文献分析
2.1.1 图像传感
图像传感技术是无人驾驶汽车中较为重要的一个单元,无人驾驶汽车通过图像传感器可以检测车是否偏离车道等重要信息。通过我国对无人驾驶汽车环境感知技术的研究文献[3]分析得出,无人驾驶汽车在行驶过程,通过毫米波雷达、三维激光雷达等技术,感知汽车周围的障碍物信息,并通过相机直接传递汽车周围的路况信息。但是由于天气情况不同、相机的安装位置不同、汽车运行的快慢,会对周围路况信息的感知产生一些偏差。
2.1.2 毫米波雷达
目前在汽车领域中装有的毫米波雷达,主要负责辅助驾驶员能更好的判断与障碍物的距离等。例如在倒车时测量周边目标的方位、距离等,但远距离需要精确遥感。现在的车载毫米波雷达都是基于线性调频波,通过发射机发射随时间变化的频率波,再将发射的信号和接收的信号混频,由于接收的信号是通过反射得到的信号,所以通过发射信号和接收信号的延时,可以判断障碍物相对于汽车的距离。袁帅[4]提出在传统汽车领域中,毫米波雷达负责测量周边目标的方位、距离和速度,从而实现各种辅助驾驶功能。
2.1.3 激光雷达
激光雷达在无人驾驶汽车中主要用于检测动态障碍物,通过对动态障碍物的特征分析及运动状态的分析,可以分析障碍物的运动特征,避免无人驾驶汽车与动态障碍物的碰撞,并能测得较远距离的障碍物的运动特征。黄林如等人[5]基于激光雷达,研究无人驾驶汽车对动态障碍物的识别与检测,在实验中的无人驾驶汽车装备了HDL三维激光雷达、相机、IBEO四线激光雷达以及SICK单线激光雷达,无人驾驶汽车可以准确判断并识别动态障碍物,且平均的障碍物判断距离为75 m。
2.2 国外研究文献分析
美国谷歌公司作为最先发展无人驾驶技术的公司,其研制的全自动驾驶汽车能够实现自动起动行驶与停车。谷歌自动驾驶汽车项目重组为一家名为Waymo的独立公司。Waymo于2017年11月7日对外宣布,将对不配备安全驾驶员的无人驾驶汽车进行测试。福特公司也准备在2021年,在美国公路上投放大量无人驾驶汽车进行测试。
3 建筑施工塔吊与人工智能化
3.1 建筑施工塔吊
塔吊是建筑工地上最常用的一种起重设备,又名“塔式起重机”。塔式起重机以塔身结构为核心,各个运转部分能够分别组成不同的模块,用来起吊施工用的钢筋、木楞、混凝土、钢管等施工的原材料。塔吊是工地上一种必不可少的垂直与水平运输设备。
3.2 塔吊的智能化
塔吊的智能化系统主要包括:显示器、传输子系统、执行子系统、主控器、传感器、通信模块、塔吊操作人员监控软件、远程监控平台。显示器可实时观察塔吊或塔吊群的工作状况,通过手机提醒的起重臂杆防互撞报警功能、紧急制动功能、超载警示功能等。
在显示器中不仅可以看到传输的命令,也能监控塔吊群的运行状况。通过电脑输入传输命令,通过传感器寻找目标物,并待货物安装完毕,由传感器判断货物是否超重、路径是否安全等问题,再将货物运输到指定位置。在货物偏离重心或接近塔吊群的安全距离时,报警系统发出警报并紧急制动,同时通过通信模块反馈到工作人员,由工作人员重新输入数据。同时,具有黑匣子功能,记录每次的执行过程。
3.3 塔吊的人工智能系统
3.3.1 执行子系统
人工智能塔吊的执行子系统一和执行子系统二如图2,图3所示。

图2 执行子系统一
执行子系统一的运行过程如下:
1)接收到传输系统给出的选取货物路径及运输货物路径,第一步判断选取货物路径中是否存在塔吊之间的起重臂杆碰撞问题,若路径中存在碰撞问题,则选取货物路径报警系统发出警报,且通过手机和电脑反馈到工作人员,由工作人员通过选取货物路径的警报系统,重新输入选取货物路径数据。
2)选取货物路径不存在塔吊之间的起重臂杆碰撞问题时,则沿传输系统给出的指令运行到指定位置。第二步根据毫米波雷达判断定位是否精准,若定位不精准(由于阴天、下雨天、雾天、下雪天等可能产生偏差),则定位偏差报警系统发出警报,通过手机和电脑反馈到工作人员,由工作人员手动精准调整定位。
3)若定位精准,则放下绳索准备货物运输,执行子系统一结束。
执行子系统二的运行过程如下:
a.工人将货物装好后,第一步先判断货物是否超重,若货物超重,则超重报警系统发出警报,通过手机和电脑反馈到工作人员,工作人员通知工人重新调整货物重量。
b.若货物重量在限定范围内,则将货物吊起,第二步判断货物是否偏离重心。若货物偏离重心,则偏离重心报警系统发出警报,并通过手机和电脑反馈工作人员,由工作人员通知工人重新调整货物重心。

图3 执行子系统二
c.若货物没有偏离重心,则准备货物运输。第三步判断货物运输路径中是否存在塔吊之间碰撞问题。若货物运输路径中存在塔吊碰撞问题,则货物运输路径报警系统发出警报,并通过手机和电脑反馈到工作人员,工作人员通过监控,重新调整货物运输路径数据。
d.在货物运输路径中不存在塔吊之间的起重臂杆碰撞问题时,继续执行货物运输指令,执行子系统二结束。
3.3.2 塔吊的人工智能执行系统
塔吊的人工智能执行系统,如图4所示。
塔吊的人工智能执行系统可通过显示器直接看到电脑给出的传输指令。传输系统给出指令后,通过执行子系统一和执行子系统二执行指令,并由黑匣子储存运输记录。
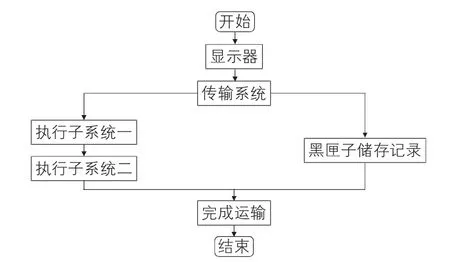
图4 塔吊的人工智能执行系统
4 塔吊的人工智能发展前景
目前智能化已经运用到运输系统中,在无人驾驶汽车方面,人工智能化已经让无人驾驶汽车在路面行驶。若能将人工智能化运用到建筑施工的塔吊当中,可以将塔吊的工作情况通过显示器直观显示出来,并能实时监控。报警系统可以让工作人员及时发现问题并校正,并且通过本文提出的塔吊人工智能执行系统,有效预防塔吊之间的起重臂杆碰撞,在塔吊工作的安全方面将有很大的改善。在智能化的时代中,建筑施工塔吊的智能化也会成为必然趋势。
5 结语
1)本文通过对无人驾驶汽车的环境感知和导航定位技术的国内外文献研究,把图像传感技术、毫米波雷达检测障碍物间距离、激光雷达检测动态障碍物技术应用在建筑塔吊上,有效预防和解决塔吊之间的起重臂杆碰撞、自动选取货物路径等问题,将显著改善塔吊的安全性。
2)本文提出的建筑施工塔吊的人工智能应用领域树状图和执行系统,为今后进一步研究建筑机械的人工智能化提供借鉴。
猜你喜欢
北京测绘(2022年5期)2022-11-22
起重运输机械(2022年19期)2022-11-05
建筑施工(2022年3期)2022-07-18
中国特种设备安全(2022年3期)2022-07-08
珠江水运(2021年15期)2021-11-23
汽车观察(2021年8期)2021-09-01
河南建材(2021年12期)2021-01-07
当代工人(2019年19期)2019-11-22
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26