
基于Simulink的汽车ABS仿真分析
2019-01-02 05:08:18赵垚森徐小东
机电工程 2018年12期
赵垚森,朱 勇,徐小东
(重庆交通大学 机电与车辆工程学院,重庆 400074)
0 引 言
我国ABS技术的研究开始于20世纪80年代初。近年来,我国参考联合国欧洲经济委员会的汽车制动法规R13的附件13《采用制动防抱装置的车辆的试验要求》,也相应制定了强制安装ABS系统的国家标准GB13594-92[1]。
本文将通过软件搭建ABS的仿真模型[2],模拟验证汽车的制动工况,探讨汽车安装ABS的必要性。
1 汽车ABS数学模型
1.1 车辆动力学模型
本文采用最简便的单轮车辆模型,并且假定车轮载荷为固定值[3],忽略风阻和车轮滚动阻力。由此可得车辆动力学方程:
(1)
(2)
车辆纵向摩檫力:F=μN
(3)
式中:M—车辆总质量的1/4;υ—车辆行驶速度;F—纵向摩擦力;I—车轮的转动惯量;ω—车轮角速度;R—车轮行驶半径;Tb—制动器制动力矩;μ—纵向附着系数;N—地面支持力。
根据上面的车辆动力学方程,笔者建立对应的仿真模型。将车轮转速、车辆速度以及制动距离这3个指标作为输出结果,将纵向附着系数和制动力这2个参数作为该模型的输入。
1.2 汽车轮胎模型
常用的轮胎模型有魔术公式模型、双线性模型等[4],本文采用魔术公式模型。纵向附着系数与滑移率之间存在如下关系:
μ(S)=
f+Dsin{Carctan[BS-E(BS-arctan(BS))]}
(4)
式中:μ—纵向附着系数;f—轮胎的静摩擦系数;B—刚度因子;C—曲线形状因子;D—峰值因子;E—曲线曲率因子;S—滑移率。
其中,轮胎的静摩擦系数f相当于车轮在纯滚动时的附着系数,通常认定为0[5]。B、C、D、E这4个参数均为常数,其与路面息息相关,仿真模型中的地面附着系数可以通过这4个参数值的变化而变化,进而模拟不同状况的实际路面。对于干燥沥青路面,利用Simulink多次验证,此处取B=16,C=1.65,D=0.85,E=0.9[6]。
1.3 制动系统模型
制动系统主要包括传动机构和制动器。其中传动机构主要指液压传动系统,通常主要是考虑制动力调节器的制动压力与电磁阀电流变化的关系[7]。此处选择性地忽略压力传送的延迟和电磁阀弹簧的非线性因素,将制动系统中的传动机构简化为一个电磁阀和一个积分环节[8]。传递函数表示为:
(5)
式中:K—系统增益,取100;T—时间常数,通常取0.01[9]。
即有:
(6)
制动器的建模主要考虑到制动气液压力的变化对制动器力矩改变的影响。假设制动器为理想元件,忽略滞后性带来的影响。因此,制动器方程为[10]:
Tb=Kf·P
(7)
式中:Tb—制动器制动力矩;Kf—制动器制动系数;P—制动器气液压力。
1.4 滑移率模型
滑移率是指在车轮运动中滑动成分所占的比例,常用S来表示,其表达形式如下:
(8)
式中:υ—车速;ω—车轮滚动角速度;R—车轮半径。
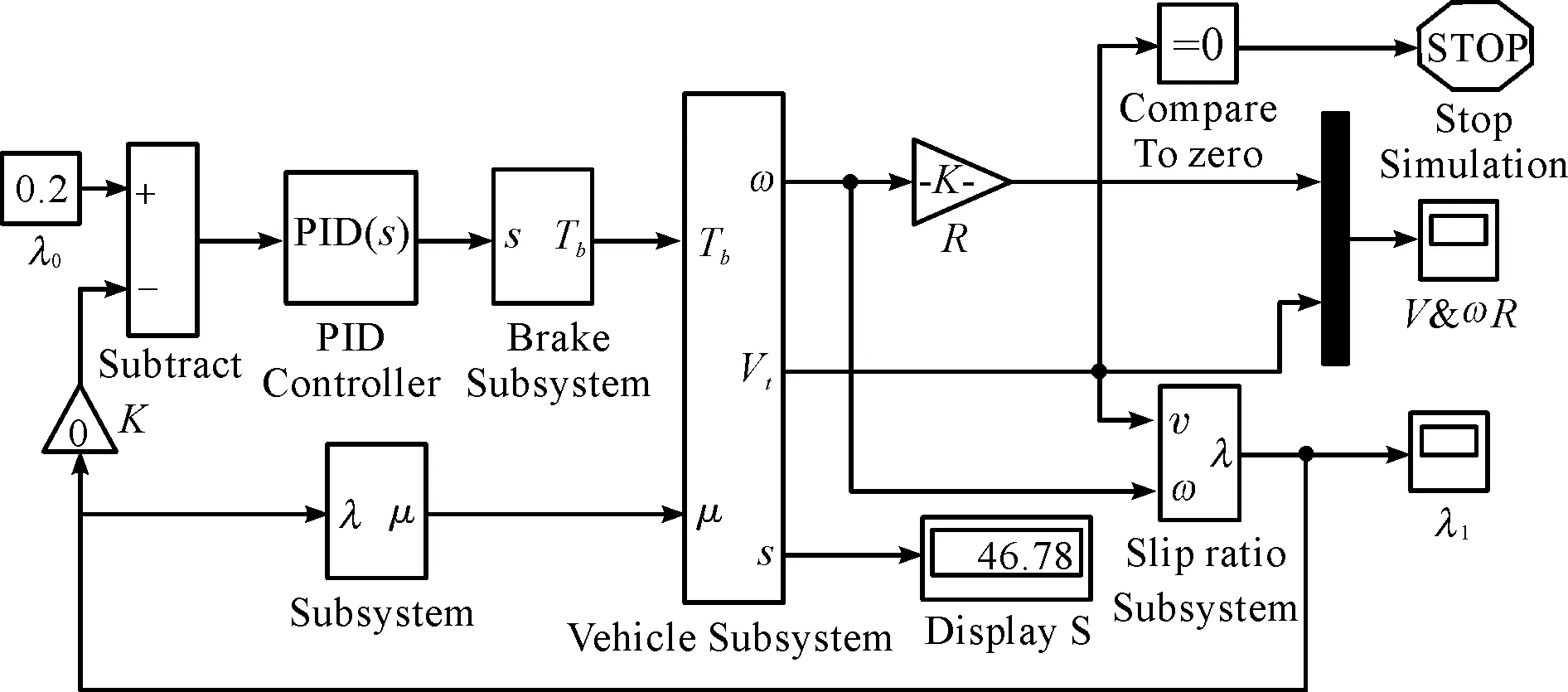
当车轮纯滚动时,υ=ωR,s=0;当车轮抱死纯滑动时,ωR=0,s=100%;当车轮边滚边滑时,υ>ωR,0 本文的汽车ABS的控制系统主要是PID控制器,利用测得的汽车速度、车轮转速信息算出各轮胎实际滑移率,再将其与期望滑移率进行比较得出差值,作为控制器的输入量。制动器制动压力的大小调节就依赖于PID控制器的输出量。 PID控制器Ki、Kp、Kd这3个参数的设置,本文采用PID Controller模块不断调节这3个参数并验证,直至控制系统响应速度快、稳定性好,最终使得实际滑移率维持在理想的数值范围内,使得汽车保持较好的制动工况。 其数学模型为[12]: Δ(t)=M(t)-R(t) (9) (10) 式中:Δ(t)—控制量偏差;M(t)—给定目标值;R(t)—实际控制输出量。Kp—比例系数;Kd—微分系数;Ti—积分时间常数;Td—微分时间常数;u0—控制常量,即t=0时的输出量,对绝大多数系统都有u0=0[13]。 在有无ABS的情况下,利用Simulink分别进行仿真。汽车ABS仿真模型如图1所示。 图1 汽车ABS仿真模型 本文采用的汽车模型参数如表1所示。 表1 汽车模型参数 当PID控制器输入端的增益模块K=1时,进行有PID控制的ABS制动仿真,其制动距离为45.16 m。有ABS的车速与轮速的变化曲线如图2所示。 图2 车速与轮速变化曲线 由图2可知:轮速线一直处于车速线下方并靠近车速线。根据滑移率公式(8)可推知滑移率数值较小,滑移率控制效果较好。 滑移率变化曲线如图3所示。 图3 滑移率变化曲线 由图3可知:滑移率始终维持在0.2的数值附近波动,说明了本文的PID控制器发挥了较好的调节作用。 当PID控制器输入端的增益模块K=0时,进行无PID控制的制动仿真。其制动距离为46.98 m。 无ABS的车速与轮速的变化曲线如图4所示。 图4 无ABS的车速与轮速变化曲线 无ABS的滑移率变化曲线如图5所示。 图5 无ABS的滑移率变化曲线 两种制动工况的仿真数据对照表如表2所示。 表2 两种制动工况下的仿真数据对照表 从表2可以看出: (1)安装ABS制动时,在开始制动后滑移率不断调节,在时间为0.317 s时达到最大值0.262,并且随着控制器的不断调节,滑移率波动的幅度越来越小,越来越趋于稳定,趋于设定的理想滑移率数值,没有出现纯滑动、车轮抱死的现象,说明在制动特别是紧急制动时,ABS一定程度上保证了汽车的方向操纵性和制动性能; (2)未安装ABS制动时,汽车车轮在0.606 s时完全抱死,此时汽车基本失去转向能力,基本失去了对车子的控制。 本文利用Matlab Simulink板块搭建了干燥路面下汽车制动系统的相关模型,并进行了仿真测试;通过对比是否安装ABS的汽车制动情况可知:ABS在汽车紧急制动时可以极大地减小或者避免车轮抱死滑动,使得汽车在制动时的转向操纵性、方向稳定性得到较大改善。 本文下一步还将模拟泥泞、湿滑、积雪等道路条件下的制动工况,以及不同制动速度下的制动情况。1.5 基于滑移率的PID控制器模型
2 汽车ABS仿真及结果分析
2.1 汽车ABS仿真模型

2.2 有ABS的汽车制动仿真


2.3 无ABS的汽车制动仿真


2.4 仿真结果分析

3 结束语
猜你喜欢
机电信息(2022年9期)2022-05-07 01:54:11
江苏安全生产(2021年9期)2021-11-27 08:08:28
小读者(2019年24期)2020-01-19 01:51:36
中国特种设备安全(2019年3期)2019-04-22 05:05:32
汽车观察(2019年2期)2019-03-15 06:00:34
汽车维护与修理(2018年1期)2018-04-04 01:13:22
中学生数理化·八年级物理人教版(2017年6期)2017-11-09 06:00:30
发明与创新·中学生(2016年7期)2016-05-14 04:08:26
汽车维护与修理(2015年5期)2015-02-28 12:16:34
汽车科技(2015年1期)2015-02-28 12:14:42
