
柔性吞咽机械手的结构设计与样机试验*
2019-01-02 02:20董增雅高国华
机电工程 2018年12期
董增雅,高 谦,高国华*,王 皓
(1.北京工业大学 机械工程与应用电子技术学院,北京 100124;2.北京生产力促进中心,北京 100088)
0 引 言
目前,我国农业生产领域已经比较广泛使用机器人[1]。我国果树种植面积超过1 000万公顷,年产量超过2亿吨[2]。果实采摘是农业生产中最耗时费力的环节。采摘自动化能提高劳动生产率和产品质量,确保适时采收果蔬,解决劳动力不足等问题[3-4]。采摘机器人是智能农业机械化的发展方向之一,具有广阔的应用前景[5]。
机械手是采摘机器人实现果实采摘的核心部件,由于果皮较为脆弱,抓取过程中容易造成损伤,对机械手具有一定的柔性要求[6]。与传统刚性机械手相比,柔性机械手具有质量轻、体积小、速度高、负载能力强、能耗小、成本低等优点。
目前,国内外对机械手已开展了大量的研究,但是存在通用性较差、结构复杂、控制困难、柔顺适应性差等问题。加拿大制作了自适应机械手指PaCoMe,无需传感器,控制简单,但柔顺性较差[7];葡萄牙研制了依据绳线驱动的柔性连接手,机构本身容易倾斜[8];哈佛大学研制了气动型软体机器人,可以抓取鸡蛋但是加工困难[9];美国研制了一种西红柿采摘机械手,属于高度欠驱动机构,手指易发生弯曲而导致果实抓取的失败[10];卧龙岗大学基于3D打印制造了柔性手指,刚度可调,能抓取最大重量为180 g的瓶子[11-12];浙江大学利用欠驱动原理研制了一款结构简单的末端执行装置[13];南京理工大学基于刚柔相结合的方案制作了一种软体驱动三触手柔性手爪[14-15];浙江工业大学王志恒等人[16-20]设计了ZJUT气动柔性机械手;杨婕等人[21-22]采用铝合金研制了欠驱动灵巧机械手;浙江工业大学以气动柔性关节和扭转关节为基础设计了柔性手爪[23]。
通过国内外的研究现状分析可知,机械手的结构分为2类:一类多是关节型,手指数目一般为3~5个,手指关节的运动副多为转动副,此类机械手一般是刚性接触,通过多关节手指完成抓取,但是结构复杂、质量大、柔顺性差;另一类为基于新技术、新材料的机械手,该类机械手自适应抓取效果好、驱动简单,但存在加工困难、成本高等问题。
因此,本文结合气压驱动设计一款结构精简、柔顺性好、成本低的机械手。
1 柔性吞咽机械手结构设计
1.1 设计目标
基于前期对机械手的调研和分析,本文确定了具体设计目标:
(1)柔顺性。机械手需具有自适应变形的能力和良好的抓取效果;
(2)结构简单。结构复杂的机械手造成装配困难、控制复杂,所以结构越简单,性能越优良;
(3)结构创新。减少或者合并动作的执行,必将对机械手的抓取性能和效率有所改善。
1.2 整体结构设计
柔性吞咽机械手具有柔性自适应抓取和吞咽的功能,结构如图1所示。

图1 柔性吞咽机械手
机械手主要由柔性手指、气动元件、气管接头、手腕和底座组成。柔性手指为三角形结构,底座中间为中空结构。手腕的上、下两部分均可弯曲,气动元件为可以压缩和伸长的气囊。通过气囊的压缩和伸长驱动手腕的变形,实现对球形果实的抓取和吞咽。
手腕设计为一体件,在气动元件的驱动下进行弯曲变形,并具有弹性变形的功能,当驱动完成时,恢复至原状。手腕顶端设有燕尾槽,可与柔性手指底端的燕尾槽相连,由于手腕和柔性手指的材料性能不同,装配牢固可靠。
为了质量轻便,将驱动源后置,本文设计了气动元件,气动元件包括抓取气囊和吞咽气囊。抓取气囊固定在手腕下部,气嘴通过底座的圆孔直接安装在气管接头一上。吞咽气囊固定在手腕上部,通过手腕上的圆孔与气管接头二相连。笔者通过对气动元件气囊的伸长、缩短进行驱动,从而实现柔性吞咽机械手的抓取和吞咽功能。
1.3 流程分析
机械手的柔性主要体现在柔性手指和手腕上。气动元件驱动手腕弯曲,与柔性手指的变形协调配合,对接触对象进行抓取。具体的动作流程如图2所示。
(1)抓取球形物。吞咽气囊充入负压气体处于压缩状态,抓取气囊充入正压气体带动手腕弯曲,使得柔性手指处于竖直状态,与物体接触后柔性手指自适应物体变形,完成抓取功能;
(2)包裹球形物。抓取气囊持续输入正压气体保持不变,吞咽气囊充入正压气体,达到设定值,此时柔性手指底端间距稍微变大,柔性手指指尖聚拢,使得柔性手指适应球形物发生变形,完成包裹;
(3)吞咽球形物。吞咽气囊充入正压气体至设定值保持不变,减小抓取气囊正压气体,此时柔性手指的上部聚拢,柔性手指底端间距变大,球形物下落,中空的底座与手腕的下部组成吞咽通道,物体下落到吞咽通道内,完成吞咽过程;
(4)减小吞咽气囊正压气体,柔性手指打开恢复至气囊自由状态下,此时抓取气囊和吞咽气囊均充入负压气体处于压缩状态,柔性手指处于打开状态。
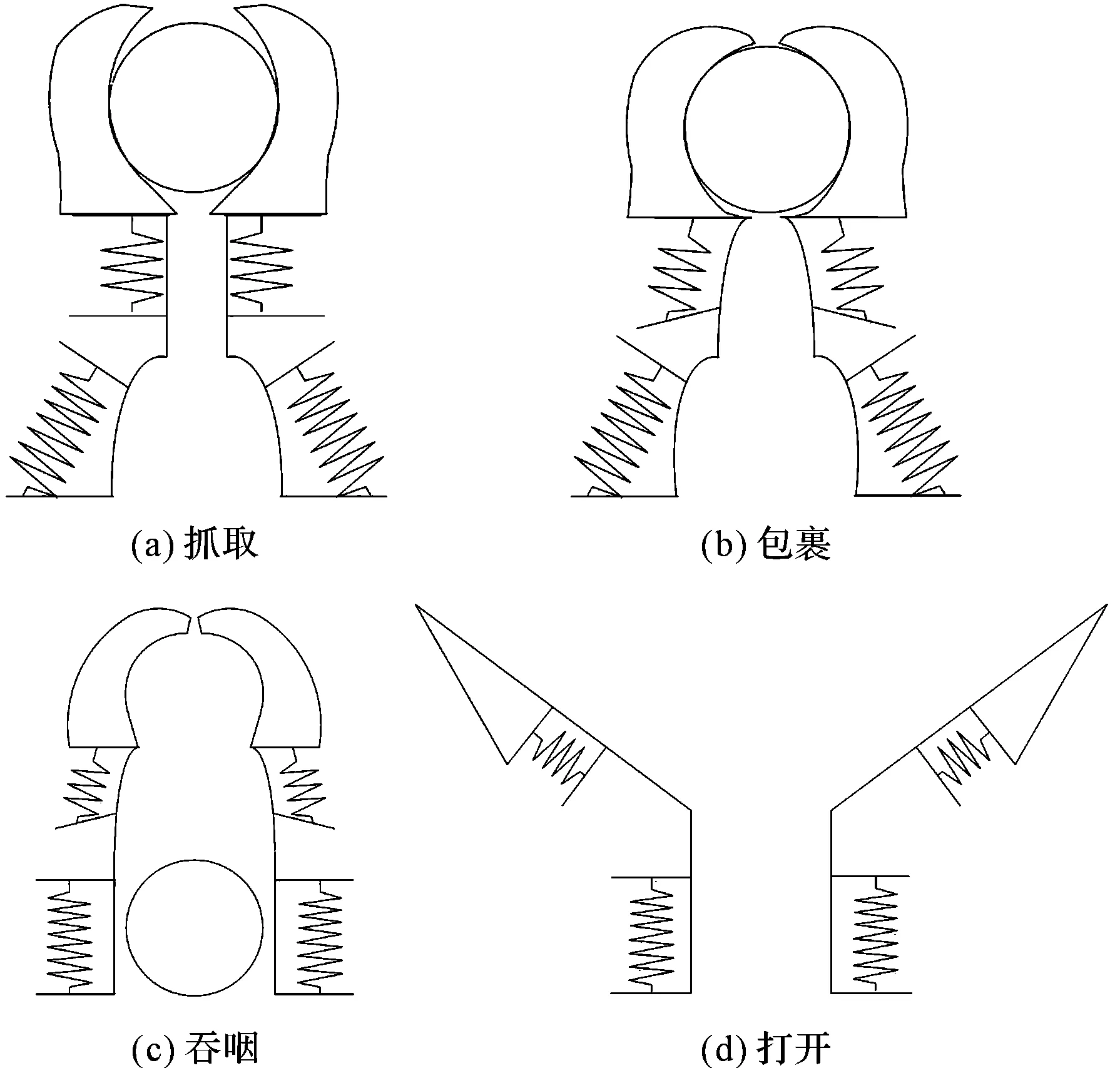
图2 动作流程示意图
2 单手腕运动学分析
手腕下部分相对于底座存在一个转动,手腕上部分相对于中间较厚的部分也有一个转动,故整个手腕有两个转动自由度。手腕不发生弯曲变形的较厚部分直接简化成连杆,发生弯曲变形的两部分简化成常曲率圆弧,柔性手指直接简化成连杆。
平面四杆柔性机械手如图3所示。

图3 平面四杆柔性机械手示意图b1—连杆1长度;a—连杆2长度;b2—连杆3长度;l3—连杆4长度;(x0,y0)—基础坐标系,固定在基座上;(x1,y1),(x2,y2),(x3,y3),(x4,y4)—连体坐标系,分别固结在连杆1、2、3、4并随它们一起运动;关节角顺时针为负逆时针为正,假定z0、z1、z2、z3垂直于纸面向外
通过连杆坐标系可以得到柔性机械手的连杆参数,如表1所示。
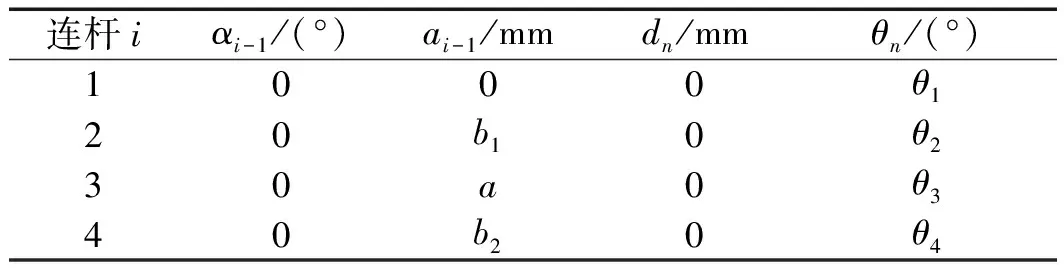
表1 连杆参数
本研究运用D-H方法建立其运动学方程。
可以得到第i个坐标系相对于第i-1个坐标系的齐次变换矩阵分别为:
(1)
(2)
(3)
(4)
(5)
(6)
其中:
θ1234=θ1+θ2+θ3+θ4,θ123=θ1+θ2+θ3,θ12=θ1+θ2。
即端点坐标为:
(7)
(8)
式中:α1—圆心角1;b1—圆心角α1对应的弦长;L1—圆心角α1对应的弧长;α2—圆心角2;b2—圆心角α2对应的弦长;L2—圆心角α2对应的弧长。
由弦长公式得:
(9)
(10)
由平面几何关系可以得到θ1,2与α1,2的关系:
(11)
最后得到柔性手指的端点坐标:
(12)
(13)
其中,L1=42,L2=28,L3=102,a=60.67。
假设给定关节变量α1、α2的值,利用上式就可以计算出柔性机械手的位姿。
3 柔性吞咽机械手样机验证
3.1 样机搭建
本文设计的柔性吞咽机械手采用FDM型3D打印加工制作而成,手腕和底座材料为PLA(生物降解塑料聚乳酸);柔性手指、抓取气囊、吞咽气囊材料为TPU(热塑性聚氨酯弹性体)。
组装完成的柔性机械手的质量仅为385 g。其中气动部分主要包括气管接头和真空发生器,气泵通过气管充入正压气体,气动元件膨胀伸长;依靠真空发生器充入负压气体,气动元件收缩。
3.2 气动元件形变量标定试验
驱动元件安装在样机中,形变量受到手腕的制约,因此若要达到确定的位置,需要对驱动压力和驱动角度进行标定。抓取气囊的驱动角度为A,吞咽气囊的驱动角度为B,气囊标定试验如图4所示。

图4 气囊标定试验
抓取和吞咽气囊的标定试验分开进行。当进行抓取气囊试验时,吞咽气囊用扎带捆住,只对抓取气囊充气,通过气压表来控制压力,并利用摄像机对驱动元件变形过程进行拍摄记录,从而得到角度值A,同理得到B。
本研究利用Matlab软件的数据拟合模块cftool对测得数据进行拟合,拟合曲线如图5所示。

图5 气动元件拟合曲线
抓取气囊驱动角度A与气压P1最后拟合的公式为:
(14)
式中:a—系数,取值为2 437;b—系数,取值为-1 385;c—系数,取值为316.4;d—系数,取值为31.07。
吞咽气囊驱动角度B与气压P2最后拟合的公式为:
(15)
式中:a—系数,a=4.334*105;b—系数,b=-1.018×105;c—系数,c=5 579;d—系数,d=421.6;e—系数,e=16.26。
这样,通过拟合公式便可以由气压控制气囊的驱动角度。
3.3 抓取试验及结果分析
笔者设定抓取气囊的压力值为0.25 MPa,吞咽气囊的压力值为0.12 MPa。本研究对西红柿进行15次抓取试验。试验流程如图6所示。

图6 样机抓取试验
通过样机试验可以发现:柔性手指在与西红柿的接触过程中变形良好,气动元件灵活,果实下落过程顺滑,基本满足柔性机械手的设计要求。
本研究对照片进行处理,通过GetData软件得到不同过程中相对应的驱动元件的角度,对15次数据求取平均值,如表2所示。

表2 驱动角度平均值
通过角度的变化,柔性机械手实现了良好的抓取和吞咽功能,也验证了运动学方程的正确性。按照理论分析,吞咽气囊角度B在抓取和打开过程中的值都为0,但由于多次试验气囊内部存有残留气体,使得角度测量值有所误差。
4 结束语
本文利用D-H坐标法和常曲率变形建立了单手腕的运动学方程,基于3D打印搭建了样机,并进行了气动元件形变量的标定试验和对西红柿的抓取试验。试验结果表明:柔性机械手可以实现果实的无损抓取、达到良好的吞咽效果,也验证了运动学分析的正确性。
该结构精简、自适应性强,通过柔性手指的自适应变形抓取对象,通过角度的控制可以实现良好的吞咽效果。
猜你喜欢
石油矿场机械(2022年3期)2022-06-17
装备制造技术(2020年4期)2020-12-25
装备制造技术(2020年2期)2020-12-14
钟表(2020年5期)2020-11-06
当代陕西(2019年20期)2019-11-25
中国生殖健康(2019年11期)2019-01-07
制造技术与机床(2018年11期)2018-11-23
汽车实用技术(2017年16期)2017-09-21
制造技术与机床(2017年4期)2017-06-22
通信电源技术(2016年1期)2016-04-16
