机载火控雷达典型空-空工作模式浅析*
2018-12-28 04:32唐玉文何明浩韩俊张小涵
现代防御技术 2018年6期
唐玉文,何明浩,韩俊,张小涵
(空军预警学院,湖北 武汉 430019)
0 引言
经过近80年的发展,当前机载火控雷达已经成为先机战机遂行多样化作战任务最重要的电子传感器之一。不同的工作环境和作战任务对雷达的功能要求也不同,为了适应这种要求,雷达系统必须针对可能面临的不同任务设计相应的工作模式才能满足高速的任务切换。以AN/APG-77雷达为例,为了适应复杂的空战环境,仅空对空就设计了多达十几种工作模式[1]。不同的工作模式对应不同的战术任务,也就意味着不同的威胁等级。所以空战中只有准确识别蓝方火控雷达空-空工作模式才能采取恰当的应对措施。
文献[2-12]对雷达工作模式识别做了一部分研究,但是他们的研究重点在于识别分类器的构造和选择,弱化了雷达在不同工作模式下的信号特征和内部机理分析,然而这些却是识别参数提取的关键,也是实现工作模式识别的前提。文献[13-16]对机载火控雷达工作模式的实现进行了研究,但主要集中在信号处理层面,对信号样式和扫描规律的分析较少。文献[17-18]对不同工作模式下雷达的探测距离做了分析。
以上文献从不同角度对机载火控雷达的工作模式做了研究,但是都缺乏对于信号样式和扫描规律的系统分析和总结,因此本文着重从信号样式和扫描规律上对几种典型的空-空工作模式展开研究。
空-空工作模式按照执行搜索或跟踪的任务来分,可以粗划分为搜索状态的工作模式、跟踪状态的工作模式和复合状态的工作模式。每种状态的工作模式又可以划分为很多子模式。
1 搜索状态的工作模式
搜索状态的典型工作模式主要包括速度搜索(velocity search,VS)模式和边搜索边测距(range-while-search,RWS)模式。这类工作模式的典型特征是雷达只发现目标而不进行跟踪,威胁等级最低。
1.1 速度搜索模式
速度搜索,即检测目标速度信息,发现目标存在,但不能给出目标距离信息。速度搜索模式是体现雷达最远探测距离的模式,主要用于对远距离迎头(下视)目标的探测,能够提供目标的速度、方位、俯仰等参数。战术上一般用于威胁告警和远距离发现目标,数据率低,不能引导武器攻击,是威胁等级较低的一种工作模式。
该模式的典型特征是雷达采用高脉冲重复频率(high pulse repetition frequency,HPRF)波形,在无杂波区检测目标。一般而言,X波段机载火控雷达的HPRF范围大致在100~300 kHz之间。而为了保证高速迎头目标落入无杂波区,VS模式下要求雷达的最小PRF应当满足[19]
(1)
式中:v0为载机速度;vtmax为目标最大速度。
这种高的PRF设计不仅能使得目标落入无杂波区,而且还能在发射脉冲宽度和峰值功率一定的情况下有效提高平均发射功率和一次驻留内的回波脉冲数,从而显著提高雷达的探测性能。从PRF变化模式来看,VS的主要目的是尽可能地探测远距离目标,所以在重频运用上为了最大化相参积累时间,一般不会频繁变换PRF。但是由于HPRF带来好处的同时还存在着严重的距离遮挡,影响目标检测。所以在目标距离未知的情况下,有时为了对目标进行连续测量也需要变换多个重复频率[20],但是这种变换不同于中重频条件下的多重PRF解模糊,它的变换频度更低、单一重频持续时间更长。
扫描上,VS模式采用典型的逐行扫描方式,可以为1行,2行或4行,方位扫描范围:±15°,±30°或±60°,天线搜索中心可按需调整,搜索周期较长。
1.2 边搜索边测距模式
RWS模式是现代机载火控雷达最常用的搜索工作模式之一,主要用于搜索目标的同时对其测距。该模式下能粗略显示目标的距离、方位和高度等信息,但不对点迹进行关联。飞行员可以通过显示器上的目标历程粗略观察目标的运动轨迹。RWS模式可以实现多目标探测,但测量精度较低,不能直接用来控制导弹攻击,因此威胁程度较低。
根据使用的PRF高低RWS模式可以具体划分为高重频边搜索边测距(high-PRF range-while-search,HRWS)模式和中重频边搜索边测距(medium-PRF range-while-search,MRWS)模式。
1.2.1 高重频边搜索边测距模式
HRWS模式下,雷达使用HPRF波形以实现远距离探测,同时利用载频线性调制实现无模糊测距[21]。理论上来说,发射2段不同调制斜率的调频脉冲串即可算出目标的不模糊距离。但实际上,当目标个数大于1时,两段式的调频测距将出现距离幻影(ghosting)现象,导致不能得到目标的真实距离。因此实际中常常加入一段不调频的脉冲串用于解决距离幻影问题。具体方法是:发射3段不同调制斜率的脉冲波形,即1段频率固定的脉冲串和2段不同调制斜率的脉冲串(一般是三角调制或者2段不同斜率的双正斜调制)。以三角调制为例,图1为调频测距的原理图。
使用三角调频测距时要求发射信号调制的正负斜率数值相同,调制方向相反。三段中,不调频段脉冲串用于检测目标的多普勒频率fd,上升段和下降段用于检测与发射信号的频率差
Δf1=ktr-fd,
(2)
Δf2=ktr+fd.
(3)
联立式(2),(3)可以计算出目标回波的延时:
(4)
由于调制斜率已知,根据式(4)即可解算出目标的不模糊距离。与多重PRF解模糊法相比,调频测距的方法简单,但是精度较低,约为几千米[22],并且要求至少在连续2段不同调制斜率的脉冲串中均能检测到目标才有可能计算出目标的距离和速度。因此在检测概率较低时,不能保证在每次测量中均能获得目标距离用于维持目标跟踪[21]。
1.2.2 中重频边搜索边测距模式
MRWS模式下雷达使用中重频(medium pulse repetition frequency,MPRF)波形,主要用于改善后半球探测性能。变化样式上,多采用PRF组变方式用以解距离和速度模糊。相比于HRWS的调频测距法,多脉冲重复频率测距的精度更高,但必须发射多组不同重复频率的脉冲信号才能得到目标的真实距离。所以MRWS模式下测距的实现更为复杂,并且由于将一次驻留内的时间切分成多块分配给了不同PRF,从而使得一个相参处理间隔内的脉冲数减少,相参处理增益降低,导致雷达的探测距离下降。所以,实际中为了克服使用单一MRWS或HRWS存在的不足,RWS模式下通常中高重频交替使用以适应上视、下视全高度对目标的搜索和测距。扫描上RWS与VS模式类似,方位一般为:±15°,±30°或±60°,俯仰:1行,2行或4行,扫描周期较大,多为s量级。
2 跟踪状态的工作模式
本文定义的跟踪状态的工作模式指的是单纯执行跟踪任务而不进行搜索的一类工作模式。典型的空-空跟踪工作模式是单目标跟踪(single-target tracking,STT)模式。这种类型的工作模式测量精度和数据率都很高,可以直接控制武器进行精确打击,具有最高的威胁等级。
STT模式下,雷达的主要目的是连续、精确地获取目标的方位、距离和速度信息[23]。因此扫描上,天线始终随动于目标,集中能量对一个目标进行持续照射。
信号层面上,STT模式主要使用MPRF波形和HPRF波形。由于STT模式一般是由TWS,TAS或者SAM模式引导转换而来,此时雷达已经粗略掌握了目标的不模糊距离和速度信息,所以没有必要再利用多重PRF解模糊。这种情况下,雷达为了增加驻留期内脉冲积累数,不会频繁切换PRF,一个PRF值可能持续很长时间。例如美军的AN/APG-73雷达工作于STT模式时,为了给AIM-7导弹提供照射,只单独使用HPRF波形[24]。
3 复合状态的工作模式
为了适应武器发展的需要,特别是空对空“发射后不管”导弹的发展,要求现代机载雷达不仅要有单目标跟踪能力,还必须具备多目标跟踪能力[13]。这就促使了复合状态工作模式的出现。这类模式的特点是兼具搜索和跟踪能力,主要包括边扫描边跟踪(track-while-scan,TWS)模式、搜索加跟踪(track-and-search,TAS)模式和态势感知模式(situation awareness mode,SAM)。这类模式的威胁等级介于搜索和跟踪之间,但由于具备多目标攻击能力,因此威胁等级较高。
3.1 边扫描边跟踪模式
TWS模式是机载火控雷达常用的一种工作模式,指的是在搜索状态下利用相关技术跟踪已发现的目标。这种模式既可以用于机械扫描雷达,也可以用于相控阵雷达。但是在相控阵雷达中应用TWS技术时的跟踪性能不如机械扫描雷达[25]。该模式下天线处于搜索状态的扫描方式,采用多重PRF组变或调频法对目标测距,把检测到的所有目标的距离、角度、速度(多普勒频率)信息都存储在计算机里,利用这些目标数据形成跟踪文件,并用检测结果进行扫描间的相关处理来更新跟踪文件[26]。TWS工作模式功能框图如图2所示。
TWS的跟踪是通过数据处理实现的,不消耗额外的雷达波束资源。这使得雷达跟踪和搜索的数据率完全一样[27],所以TWS模式下的目标跟踪精度远不如STT模式,但好处是可以在一个较大的范围内跟踪多个目标。
信号样式上,TWS模式与RWS模式基本一致,主要为HPRF波形和MPRF波形。有时为了获得良好的全向探测性能,TWS模式常常在扫描中交替使用2种波形,并且这种交替不仅在行与行之间而且在帧与帧之间也是交替的。图3为扫描示意图。
3.2 搜索加跟踪模式
TAS是相控阵雷达特有的工作模式,它利用相控阵天线灵活的波束调度将搜索任务和跟踪任务分别对待,交替执行,使得不仅跟踪和搜索可以采用不同的数据率,而且对不同目标也可以采用不同的数据率。这种跟踪和搜索分时工作的方式使得TAS模式能够提供比TWS模式更高的跟踪精度和更加灵活的资源调度,因此在相控阵机载火控雷达中得到广泛应用。
TAS模式下,每个目标经历的状态包括搜索、确认、跟踪、小搜(重新捕获)和航迹终结[15-16, 28]。确认指的是,搜索过程中,如果在某个波位上检测到目标,调度中心会申请重新探测该波位,如果再次(或多次)检测到目标则认为是确定目标,而不是虚警[15]。小搜指的是由于目标机动等原因而丢失跟踪时,雷达为了尽快发现失跟的目标,会在目标丢失的小范围空域进行搜索以尽快重新捕获该目标。TAS的一个典型时序如图4所示。图中T1到T4表示的是跟踪时间,不同的宽度表示不同的驻留时间;跟踪间隔Ts为搜索时间;Td表示的是一个搜索、确认的过程。
TAS模式下,跟踪的优先级始终高于搜索。实现TAS的核心是通过有效的波束调度和驻留时间分配,使得每次照射都能保证目标被有效检测,且跟踪精度达到要求[14]。其中典型的调度方法是基于协方差的调度思想[29-30],即对每个目标设定一个误差协方差门限,通过比较当前的误差协方差值与门限协方差值从而实现资源调度。信号样式上,区分搜索和跟踪,搜索波形类似RWS,跟踪波形类似STT。
3.3 态势感知模式
SAM模式有时也叫RWS-SAM模式,是雷达RWS模式下的一个子模式,主要用于在单目标跟踪的同时保持对一定空域的搜索,等效于分时的STT加上RWS。该模式同时具有跟踪和搜索2种工作状态:跟踪状态与STT模式类似,为连续相参信号,重复间隔值变换不频繁,数据率较高,波束驻留时间通常在秒级;搜索状态与RWS,TWS相似,数据率较低,波束驻留时间较短。
由RWS转入SAM模式的过程与TAS启动目标跟踪的过程类似,一般为3个阶段,即RWS搜索阶段;发现目标后进行再探测以确认目标存在的再探测阶段。在这个阶段雷达为了减少目标起伏带来的影响会进行频率跳变以提高检测概率[31];确认为目标后雷达将调整天线中心以对准目标,进入SAM模式。进入SAM模式后雷达的典型扫描特征是,波束周期性地跳到目标波位进行照射,持续一段时间后跳回到之前的波位继续空域搜索,2种状态周期性交替进行。SAM模式的跟踪精度可以充分满足武器发射的要求。当有重要威胁目标出现在一定距离之内,以及当需要以全部雷达资源去跟踪一个特定的目标时,雷达可以自动转入单目标跟踪模式[32]。
4 不同工作模式之间的区别联系
尽管机载火控雷达的工作模式众多,但本质上讲,雷达采用不同的工作模式就是为了实现不同的战术目的,直接表现是使用不同的信号样式和波束扫描方式。表1简要列出了几种典型模式的特点。
从以上梳理可以发现,有些工作模式由于它们的特殊用途,在信号和扫描样式上明显区别于其他模式,例如VS模式和STT模式。而有些模式则十分相近,特别是TWS模式和RWS模式,无论从信号样式或者扫描规律上来看几乎都一样。但从侦察的角度来说他们也并非完全不可分,因为从战术目的上来说,TWS为了实现多目标跟踪,特别是维持多目标攻击能力,必须保持相对较高的数据率才能保证目标航迹的连续性以及武器发射所要求的跟踪精度,所以TWS的扫描范围相对于RWS来说会更小。这就给两者的区分提供了一定的依据。
各种工作模式的联系则主要体现在相互转换上。例如,由于跟踪往往需要较高的数据率,所以当需要跟踪的目标数目较多时,TAS模式将消耗大量的雷达资源,这会使得搜索完一个空域的时间显著增加,不利于态势的感知,这时雷达可以转为TWS模式来改善这种状况;另一方面,有些模式的切换则必须经过其他模式的引导,例如,VS模式下要进入STT就必须经过RWS或TWS完成测距。图5描述了典型情况下机载火控雷达空-空工作模式的转换关系(图5中HPT指高优先级目标)。
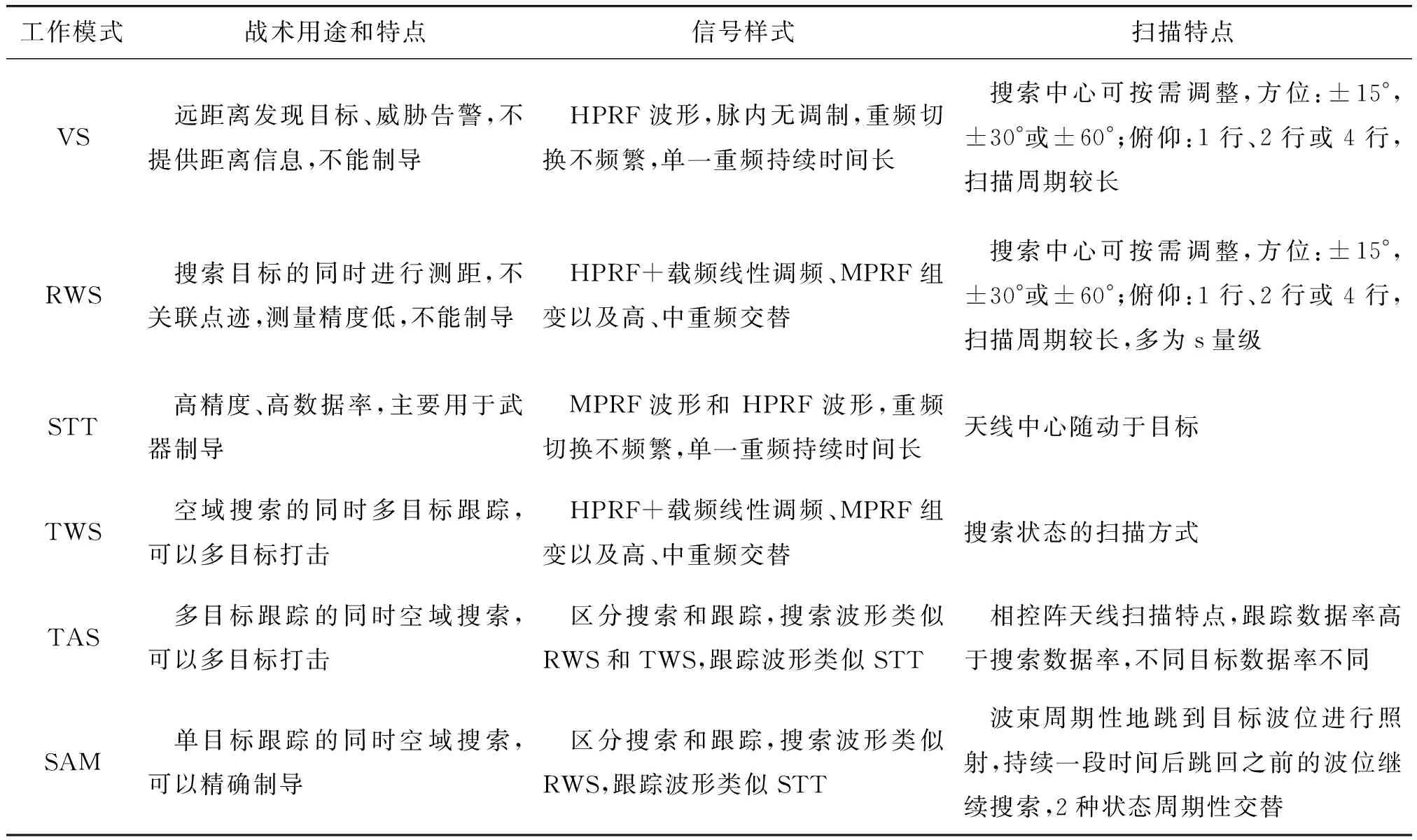
表1 典型空-空工作模式对比
5 结束语
本文针对机载火控雷达几种典型的空-空工作模式,从战术和技术2个层面作了系统地分析和总结,重点梳理了各个模式的信号特点和扫描规律。指出工作模式的本质区别是为了实现不同的战术目的,直接表现是信号样式和波束扫描的不同。通过细致地对比,论证了工作模式识别的可能性,并提供了识别的理论依据。
猜你喜欢
导航定位学报(2022年4期)2022-08-15
电子技术与软件工程(2022年6期)2022-07-07
皮肤病与性病(2021年3期)2021-07-30
有色设备(2021年4期)2021-03-16
汽车与驾驶维修(维修版)(2020年2期)2020-03-20
电子制作(2019年24期)2019-02-23
电子制作(2019年24期)2019-02-23
电子制作(2019年23期)2019-02-23
雷达学报(2018年5期)2018-12-05
汽车维护与修理(2018年9期)2018-10-31