
基于有向图的舰船机电系统可靠性可视化分析计算*
2018-12-27 00:07赵东明张小兵
武汉理工大学学报(交通科学与工程版) 2018年6期
赵东明 张小兵 曹 明
(武汉理工大学自动化学院1) 武汉 430070) (中国舰船研究设计中心2) 武汉 430070)
0 引 言
舰船保障性指标体系是舰船保障工程最重要部分,而舰船可靠性是舰船保障性指标体系不可缺少的组成之一,可靠性对舰船机电系统具有重要意义,且舰船机电系统日趋复杂,传统的基于经验的定性分析已经不能满足系统的要求,需要展开定量的可靠性分析计算[1].目前依据系统中各个构成单元和体系的可靠度数值快速计算分析系统可靠性比较繁琐和困难,基于此,本文提出一种分析计算舰船机电系统的可靠性指标的方法,分析系统可靠性及系统设备可靠性,对设计人员发现并改进结构的局部缺陷和提高可靠性极为重要.
在可靠性计算研究方面,目前国内外在可靠性分析过程中最常用的方法是先研究部件的可靠性,再分析系统的可靠性,即采用故障树分析模式来揭示系统与各组成部分的关系,然后分析计算系统可靠性[2].但故障树分析模式是采用直观的树形图来表示系统与组成部件之间的关系,这种方法的计算过程大部分都是通过人工处理计算可靠性数据,在这个过程中不仅工作量大,相当繁琐,而且故障树分析模型不能完全准确的表达出来,理论计算的结果与实际情况还存在着误差,因此需要更加合适的计算模型[3].本文为了改善可靠性计算中的问题,提出了基于有向图的可靠性计算模型,分别从系统和设备出发分析计算舰船的可靠性指标,实现从系统到设备的可靠性指标分配及从设备到系统的可靠性指标预计,利用有向图的图元能准确的表示系统之间各组成部分的关系,根据深度优先搜索算法分析系统的拓扑结构图,计算得出系统的可靠性指标,通过计算舰船的可靠性指标对舰船的设计做出一定的指导价值,为设计和生产过程的质量控制提供依据[4].本文描述的基于有向图的可靠性分析计算方法消除了目前分析中模型的不准确问题,同时也极大减少了舰船机电系统中组成分析的计算量与出错率,同时降低了舰船机电系统可靠性分析时间.
1 单元模型
单元模型是通过图形的方式建立设备之间的基础连接方式,本文选取了串联、并联、N中取R以及旁联四种连接方式,基于这四种连接方式建立舰船机电系统的模型并进行可靠性计算分析[5].四种连接方式见图1.
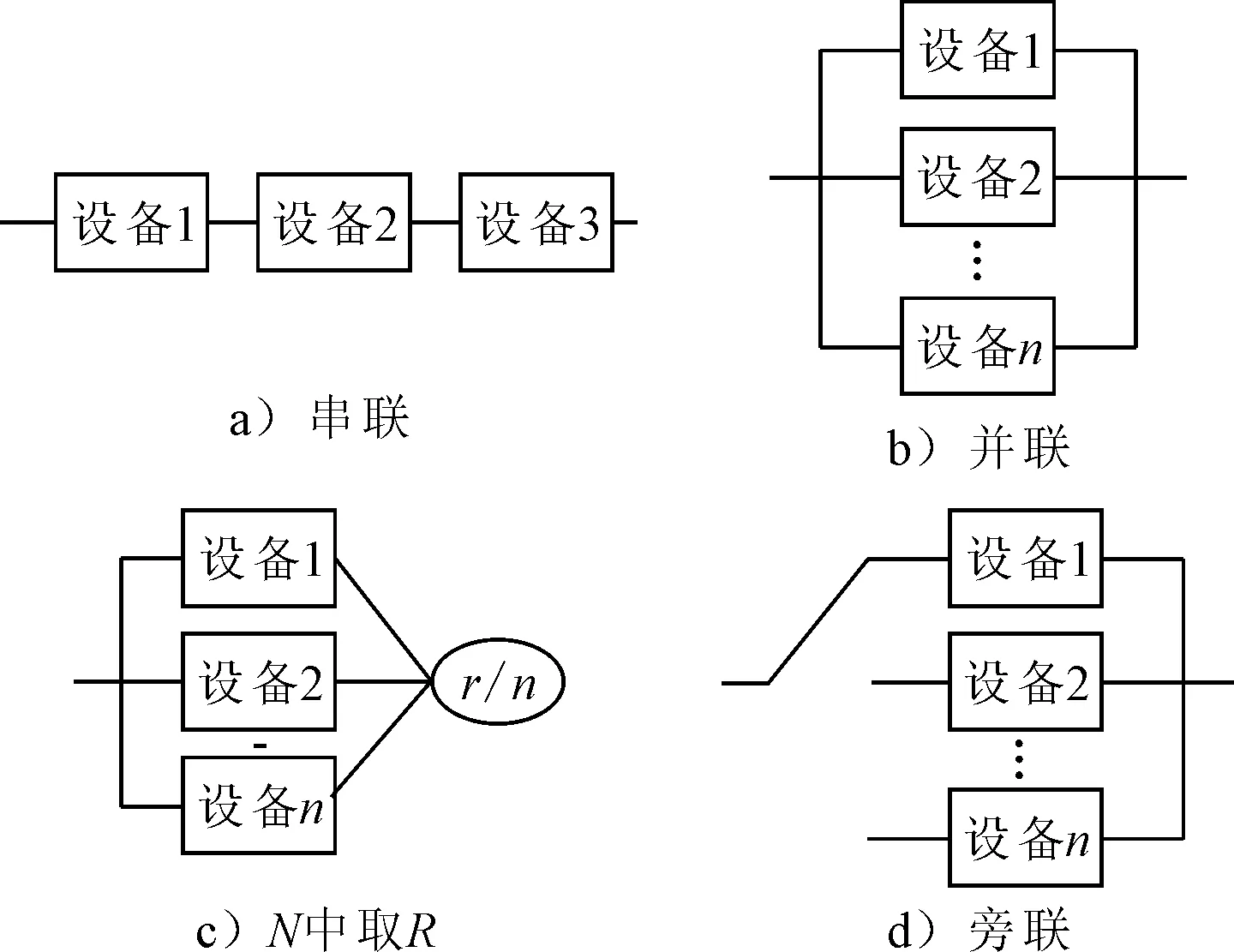
图1 连接方式
四种连接方式的相关可靠性参数计算方式[6]见表1,其中:R(t)为设备或系统的可靠度函数;MTBF为平均故障间隔时间;MTTR为平均修复时间;λ为系统失效率.为了便于研究方便,本文简单的认为N中取R与旁联的N个单元服从相同的分布.
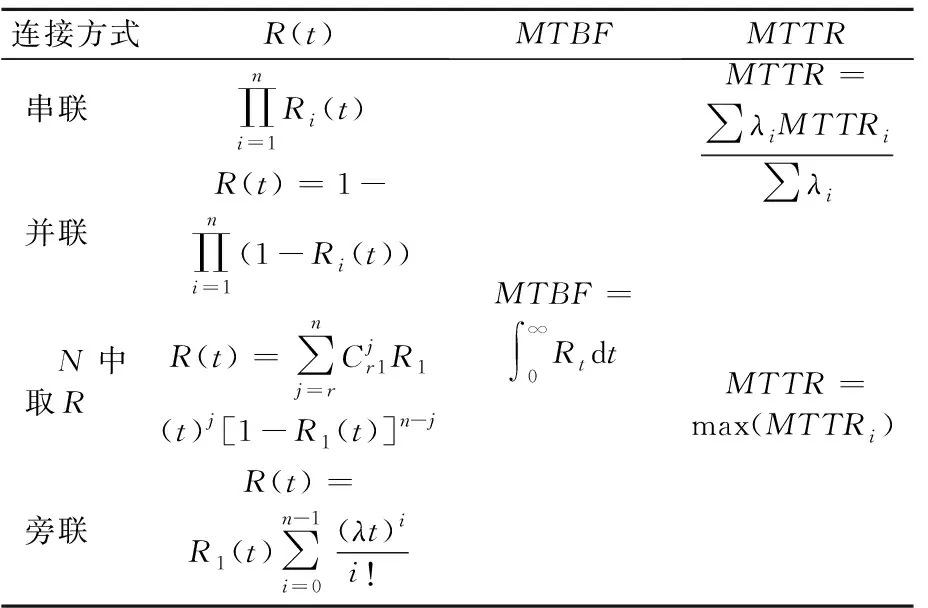
表1 单元模型可靠性指标计算
1 2 深度优先搜索算法
可靠性预计是依据单元模型把设备按一定的连接方式组成舰船机电系统可靠性框图,为了计算舰船机电系统中的可靠性预计指标,本文采用利用深度优先搜索算法对系统框图路径进行自动查找,确定系统设备的连接方式,分析系统拓扑结构,查找系统所有可达路径,然后根据系统路径计算系统可靠性指标.舰船机电系统可靠性框图见图2.

图2 系统可靠性框图
依据图2系统框图建立有向图见图3.
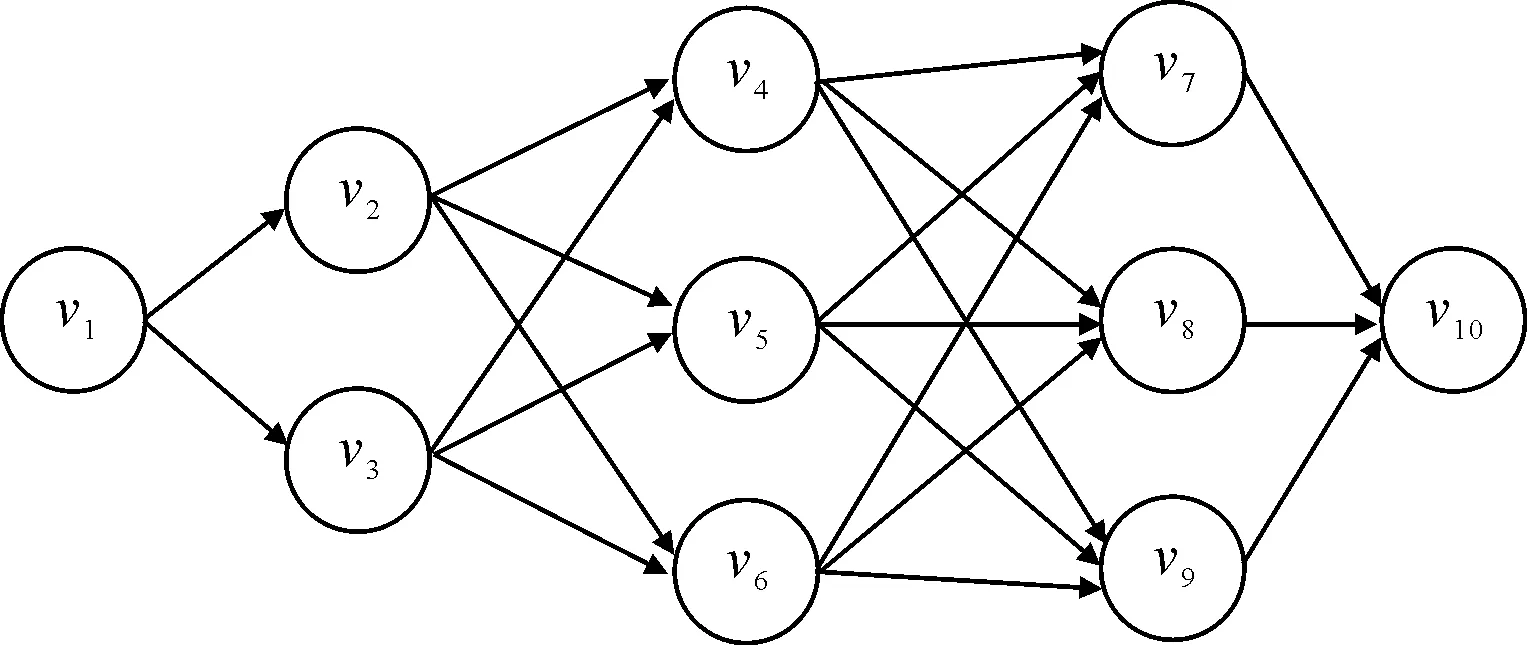
图3 有向图
有向图记为G=(V,E).其中:V为顶点合集;E为边合集.共10个顶点,20条边,则V=(v1,v2,v3,…,v10),E=(e1,e2,e3,…,e20).为了得到系统框图中所有的路径,需要对每一个起始节点分别搜索出以该节点到末节点的所有的路径.本文中选择以深度优先搜索对进行路径自动查找,采用堆栈结构来实现深度优先搜索的递归,栈中存储元素是图中的节点,将搜索得到的路径集合存到二维数组R中[7].搜索过程如下.
步骤1访问初始节点,初始节点入栈.
步骤2访问下一个节点如果节点满足以下三个条件:①该节点不在栈中;②当前生成的该节点的路径与已搜索得到的路径不同;③不是初始节点;则将该节点入栈.
步骤3再对新栈顶的元素的邻接点进行搜索并判断以上三个条件,当不满足三个条件时,则出栈,将栈中的保存的节点进行依次相连,并与初始节点相连,则找到一条新的路径r,存入到数组中.
步骤4此时初始节点未出栈,重复步骤2与3,搜索出初始节点的其他邻接点与路径.
步骤5当初始节点没有访问的邻接点时,初始节点出栈.
步骤6最后得出有向图中的所有路径的二维数组R.
3 可靠性计算
3.1 可靠性预计
舰船机电系统可靠性预计从设备到系统,根据设备的MTBF,MTTR,λ计算整个系统的可靠性指标,MTBF、MTTR、任务可靠度Rm、固有可用度Ai,以及使用可用度Ao.计算过程如下.
1) 路径搜索 系统框图共10个设备,依据系统连接框图建立有向图,基于深度优先搜索算法遍历系统可靠性模型自动查找路径,得出路径的二维数组为A,其中ri为有向图的一条路径,路径为一维数组,为
A=[r1,r2,r3,…,r10]
(1)
2) 可靠性计算 假定设备可靠度为Ri,平均修复时间为MTTRi,为
Ri=(R1,R2,…,R9,R10)
(2)
MTTRi=(MTTR1,…,MTTR10)
(3)
通过对搜索每一条路径的计算得出该路径中可靠度函数,如路径r1为(1,2,4,7,10),可计算出r1路径的可靠度函数为
(4)
搜索得到路径数量为A数组长度,假定为n,由此可得系统的可靠性函数及平均故障时间计算方式为
(5)
(6)
同样根据路径数组可得每一条路径的平均修复时间,以第一条路径为例:
(7)
根据路径数量n计算得出系统的平均修复时间为
(8)
3) 可用度 因此依据上一步计算得出系统MTBF与MTTR,以此可得系统的固有可用度与使用可用度分别为
(9)
(10)
3.2 可靠性分配
分配过程采用因子评分系数分配法,通过对系统中的各个设备的因素进行评分,即对复杂度、技术成熟度、重要度、环境条件,以及工作时间等进行评估,得出设备相关的分配系数y1,y2,y3,y4,y5,根据系统的可靠性指标Rm,Ai,Ao进行分配,得出每一个设备的可靠性指标要求,为系统设计参考.计算过程如下.
1) 根据设备分配系数计算设备的评分数wi,计算式为
(11)
2) 系统框图共10个设备,依据系统连接框图建立的有向图见图3,同时基于深度优先搜索算法遍历系统可靠性模型自动查找路径,得出路径的数组为式(1),其中ri代表一条路径.
3) 计算每一条路径中设备的总评分数,以第一条路径为例:
(12)
4) 据路径数n以及路径总评分数计算每一个设备的评分系数,计算方式为
(13)
5) 可靠性指标分配 由系统可靠性指标可以得到设备分配的可靠性指标,为
(14)
(15)
(16)
4 实例分析
为了验证可视化建模的可靠性计算的速度,本文中以舰船的配电系统为例,利用单元模型,根据舰船配电系统中设备的连接方式,搭建出舰船配电系统的可靠性框图,搭建框图见图4.
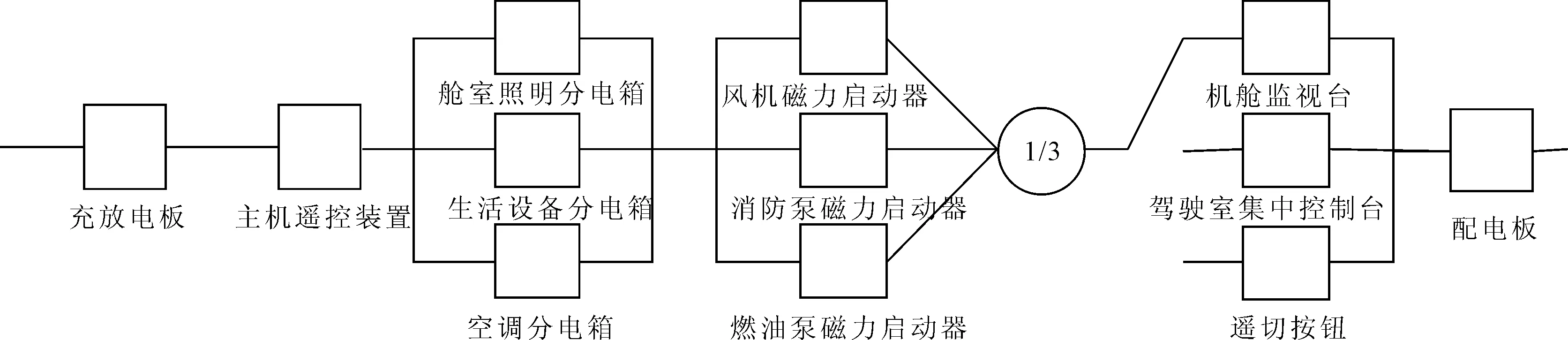
图4 配电系统图
依据框图建立系统的有向图见图5,G=(V,E),其中顶点集为V=(v1,v2,v3,…,v12),边集E=(e1,e2,e3,…,e25).

图5 有向图实例
4.1 可靠性预计
可靠性预计中配电系统相关的输入数据见表2.
通过对舰船配电系统的可靠性分析预计与计算,得出可靠性预计数据见表3.
通过深度优先搜索并快速计算得出平均故障间隔最低时间为2 233 h,平均故障间隔规定时间为2 370 h,平均修复时间为100 h,任务可靠度为0.277,固有可用度为0.93,使用可用度为0.78,计算结果与实际计算结果相符,同时计算过程耗时仅用了2.15 s,缩减了可靠性预计过程花费的时间.

表2 配电系统数据 h

表3 可靠性计算结果
4.2 可靠性分配
可靠性分配的输入参数见表4.

表4 可靠性分配输入参数
通过对舰船配电系统的可靠性分配计算,舰船可靠性分配计算结果见表5.
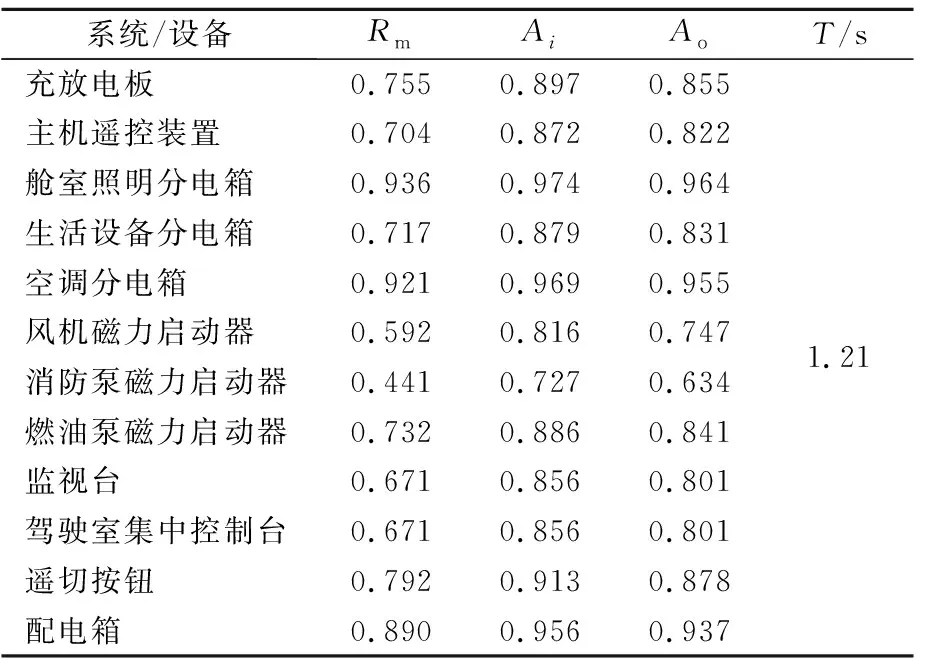
表5 可靠性分配结果
可靠性分配通过系统的可靠性参数分配设备的可靠性指标,计算出的结果经过验算符合实际结果,且整个计算过程花费时间只需1.21 s,极大减少了可靠性分配计算过程的时间.
5 结 束 语
基于有向图的可靠性可视化分析方法,并以舰船的配电系统为例验证计算.本文的方法直观的实现系统的可靠性分析计算,同时大幅度减少系统的可靠性计算时间与人工计算量.通过本文中的方法根据舰船机电系统的连接方式进行可视化连接并进行可靠性相关数据的计算,摆脱可靠性计算过程中的繁重的人工工作,减少可靠性计算过程中人工计算量,为可靠性分析与计算提供了一种可行的办法.
猜你喜欢
山西大学学报(自然科学版)(2021年4期)2021-08-31
云南民族大学学报(自然科学版)(2021年3期)2021-06-24
汽车维修技师(2019年7期)2020-01-16
电子制作(2019年20期)2019-12-04
汽车维修技师(2018年11期)2018-05-11
电子制作(2017年14期)2017-12-18
中学生数理化·高一版(2017年1期)2017-04-25
铁道通信信号(2016年11期)2016-06-01
中北大学学报(自然科学版)(2015年6期)2015-12-02
中北大学学报(自然科学版)(2015年5期)2015-12-02
