
基于模糊控制的前斜视成像末制导律设计
2018-12-26 07:55赵长见
导弹与航天运载技术 2018年6期
王 兴,赵长见,梁 卓
(中国运载火箭技术研究院,北京,100076)
0 引 言
合成孔径雷达(Synthetic Aperture Radar, SAR)利用微波遥感技术成像,与红外、电视末制导相比,SAR成像制导具有作用距离远、全天时、全天候和二维成像等优点[1,2]。近年来,在导弹上实现SAR成像,使其具备在复杂背景下的二维成像观测能力,成为精确制导武器中应用的一种必然趋势[3,4]。
飞行器全程大气层内飞行,易受到各种干扰的影响,弹道具有较大的不确定性,且目标机动亦有一定的不确定性,这最终使末制导初始时飞行器和目标的相对位置、速度和姿态存在较大的浮动范围。为了确保SAR成像末制导的性能,必须确保成像时速度矢量与弹目视线在水平面投影的夹角不小于给定值。对于中远距离的目标,导弹末端的速度是需要考虑的重要因素,提高导弹飞行的速度,可以扩大飞行器的作战空域。因此,制导律的设计还必须使导弹的速度损失较小。
本文首先针对SAR成像末制导问题建模和分析;然后以末制导段的速度损失最小为目标,设计了双输入双输出的模糊控制器,并设计了制导律,不仅满足成像前斜视角约束,还使末制导段飞行的阻力损失较小;最后通过数字仿真,对制导律的有效性进行了分析和验证。
1 问题分析与建模
前斜视成像的末制导工作流程如图1所示[5,6]。

图1 前斜视成像末制导段航向平面示意Fig.1 Schematic Diagram of the Heading Plane on the Squint Imaging Terminal Guidance Section A—末制导起始点;B—SAR成像起始点;C—SAR成像结束点;D—末制导结束点;η—前斜角,即飞行器速度矢量与弹目视线在水平面投影之间的夹角
末制导过程分为3段:
a)成像前搜索段。
末制导雷达开机之后,导引头对前方目标进行大范围扫描,确立目标区域,然后飞行器进行横向机动,使前斜角满足SAR成像的要求。
b)成像识别段。
满足成像条件后,弹载SAR对目标区域进行成像,实现目标区域二维图像,识别出目标。
c)成像后跟踪段。
成像完成后,飞行器转入单脉冲跟踪的末端打击阶段,结合SAR成像结果,对目标进行精确打击。
末制导段的飞行器-目标几何关系如图2所示[6]。
图2 末制导段的飞行器-目标几何关系示意Fig2. The Aircraft-target Geometric Relationship on the Terminal Guidance Section O-xyz—发射坐标系;M—飞行器质心;M'—飞行器质心在水平面上的投影;T—目标点;V—飞行器速度;Vxz—飞行器速度在水平面的投影;η—前斜角;σ—航迹偏航角;q—弹目视线角;R—飞行器与目标的相对距离
η,σ和q的关系为

前斜视成像模式的分辨率 ρa与成像时间 ts之间的关系式为[7]

式中 λ为雷达波长;Vxz为飞行器速度在水平面投影。
由式(2)可知,λ、ρa和R固定时,η绝对值越大,ts越小。但是在末制导中,飞行器必须以尽量小的速度损失飞向目标,弹载SAR只能工作在前斜视的状态下。导弹通过在水平面内的横向机动来满足前斜角约束,获得SAR高分辨率二维图像,带来的不利影响是使得导弹速度损失增加,对航程不利。因此,制导律的设计不仅要满足前斜视成像要求,还要使导弹的速度损失较小。
2 制导律设计
将飞行器的航向平面和纵向平面的制导律分开设计。
2.1 航向制导律
由于飞行器成像前、成像期间和成像后航向制导律设计的目标不同,将航向制导律分为成像前、成像期间和成像完成后3部分。
2.1.1 成像前航向制导律
飞行器在成像前的航向制导律包括2个环节:基于模糊控制器生成前斜角指令和跟踪理想前斜角指令。
2.1.1.1 基于模糊控制器生成前斜角指令
设末制导起始点A和成像前起始点B对应的时间、前斜角和前斜角变化率分别为(t0,η0,η˙0)和(t1, η1,η˙1),以末制导起点A为时间0点,成像前的前斜角指令分别采取直线、二次曲线、三次曲线和双抛物线。
直线前斜角指令L1为

成像前飞行段的前斜角制导指令形式 Li(i =1,2,3,4)和成像前飞行段的飞行时间 t1-t0由末制导起点始点 A的前斜角与成像前斜角指令偏差的绝对值e(e=|η0-η1|)及其导数ec决定,具体可以通过模糊网络获取。
模糊控制输入e和输出t1-t0的语言值的模糊子集均定义为:S(小),M(中),B(大);论域均定义为[+1,+6]。模糊控制输入ec的语言值的模糊子集定义为:NB(负大),NM(负中),NS(负小),ZO(零),PS(小),PM(中),PB(大);论域定义为[-6,+6]。
模糊推理规则运用肯定式:Ri: if Aiand Bithen Ci;其中,Ai为|η0-η1|的模糊子集,Bi为-的模糊子集,为第i条模糊控制规则。
根据前斜视成像要求,以末制导过程速度损失最小为目标,经过大量仿真分析,建立模糊控制规则,模糊控制规则的结果如表1和表2所示。
表1 成像前飞行段前斜角指令形式Li模糊控制Tab.1 Fuzzy Control Table of Command form Li before Squint Imaging

表2 成像前飞行段飞行时间t1-t0模糊控制Tab.2 Fuzzy Control Table of Flight Time t1-t0 before Squint Imaging
模糊控制量L(ii=1,2,3,4)的解模糊方法采用最大隶属度法。模糊控制量 t1-t0的解模糊化方法采用加权平均法。
2.1.1.2 跟踪前斜角指令
前斜角跟踪方法参考文献[6],横向过载指令为

式中 kp,ki,kd为PID控制参数,具体可以通过时域和频域仿真确定。
2.1.2 成像期间制导律
成像期间前斜角指令保持不变:

式中 ts为需用成像时间。
航向的过载指令为[6]

2.1.3 成像后制导律
成像完成后,飞行器完成目标识别,进入跟踪段,宜采用比例导引将飞行器导向目标,航向指令过载为

2.2 纵向制导律
纵向末制导律采用有落角约束的最优比例导引律,纵指令向过载为[6,8]

式中 nyc为纵向指令过载;qy为视线高低角; q˙y为视线高低角速度;r为飞行器和目标的相对距离;r˙为飞行器接近目标的速度;θf为终端落点倾角约束;V为飞行速度;θ为弹道倾角。
3 仿真计算及分析
仿真斜视成像条件为前斜角η=10°,末端弹道倾角约束θf= -90°,分别在标准工况和在偏差工况下进行仿真分析。仿真结果如图3~7所示(图中的仿真结果除角度外均进行了归一化处理)。
图3 标准工况下成像前飞行时间t1-t0对速度损失的影响Fig.3 Effect of Flight Time t1-t0 before Squint Imaging on Speed Loss under Standard Working Conditions
图4 偏差工况下成像前飞行时间t1-t0对速度损失的影响Fig.4 Effect of Flight Time t1-t0 before Squint Imaging on Speed Loss under Deviating Conditions
仿真分析不同的前斜角指令 Li(i=1,2,3,4)和成像前飞行段飞行时间t1-t0对飞向器速度损失∆V的影响,仿真结果如图3、图4所示。
由图3和图4分析可知,在标准工况和偏差工况下,随着成像前飞行段的飞行时间t1-t0增大,飞行器末制导飞行段的速度损失∆V将减小,并且趋于一个最小值∆Vmin;标准工况和偏差工况下的最优前斜角指令形式分别为三次曲线指令L3和二次曲线指令L2。
标准工况和偏差工况成像前飞行段的前斜角指令形式Li由模糊控制表1计算出(分别采用三次曲线L3和二次曲线L2),相应的成像前飞行段飞行时间t1-t0由模糊控制表2计算得出,仿真结果如图5~7所示。
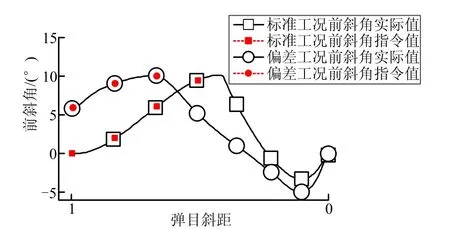
图5 前斜角实际值和指令值随斜距变化曲线Fig.5 The Actual Value of the Heading Angle and the Command Value Change with the Slant Range
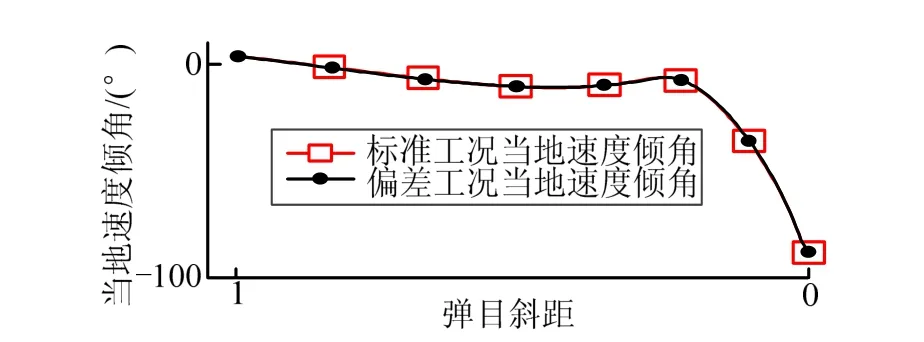
图6 当地速度倾角随弹目变化曲线Fig.6 Local Speed Inclination Angle Change with Slant Range
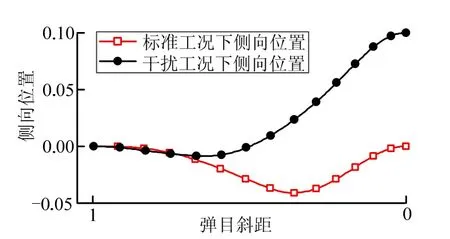
图7 侧向位置随斜距变化曲线Fig.7 Lateral Position Change with Slant Range
由图 5~7的仿真结果分析得出,在标准工况和偏差工况下:a)飞行器前斜角实际值能跟踪前斜角指令值,且在成像时刻前斜角满足前斜视成像10°的要求;b)飞行器终端的弹道倾角满足90°的约束;c)飞行器在干扰情况下能准确命中目标。
4 结束语
本文首先建立了前斜视成像末制导的数学模型,然后以起点前斜角与成像时前斜角指令偏差的绝对值及导数为输入量,以前斜角指令模式和成像前飞行段飞行时间为输出量,建立模糊控制器,并通过模糊控制器在线求取前斜角指令,最后以横向过载为控制量跟踪前斜角指令,保证了前斜成像条件,有效减小了飞行器的速度损失,可提高终端毁伤效应。本文基于双输入双输出的模糊控制器设计的前斜视成像末制导律,方法简单,适用性强,具有一定的工程应用价值。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
汽车实用技术(2022年3期)2022-02-23
科技与创新(2021年24期)2022-01-03
成都信息工程大学学报(2021年6期)2021-02-12
康颐(2020年14期)2020-11-10
电子制作(2019年16期)2019-09-27
民用飞机设计与研究(2019年4期)2019-05-21
中老年健康(2016年1期)2016-03-07
