
基于MEMS的双轴高精度测斜仪设计
2018-12-26 07:55程远超张燕琴
导弹与航天运载技术 2018年6期
程远超,黄 伟,张燕琴,仇 斌
(北京航天控制仪器研究所,北京,100039)
0 引 言
角度测量广泛应用于民用、航空航天及航海等各种领域,对中国国防建设以及科学技术研究起至关重要的作用[1~5]。但随着测量要求的不断提高,在很多应用现场,现有的角度测量仪器由于其测量范围、使用范围、精度、功耗以及体积等方面,已渐渐无法满足测量要求。MEMS高精度角度传感器SCA103T以其启动快、功耗低、可靠性高、精度高、易于实现数字化和智能化而应用于各种倾斜角度检测系统中[6~8]。
本文设计的测斜仪采用了高精度倾角传感器SCA103T、AD7734、ARM STM32F103以及RS232通信线组成硬件结构,经软件补偿精度达到±0.005°,同时通过上位机软件对该倾角测量仪进行数据采集。
1 测斜仪工作原理
采用2个VTI高精度单轴MEMS倾角传感器芯片SCA103T-05D,传感器有两个模拟输出差分信号和一个数字 SPI接口以提供直接信号处理。其中信号差分带来非常显著的优点:高校准精度,低温度漂移,高分辨率、高灵敏度及低噪声。通过倾角传感器SCA103T感应轴上的重力加速度输出的两个差分信号,经过计算可以转换得到被测设备的倾斜角度,其测量原理如图1所示。

图1 SCA103T倾角传感器角度测量原理Fig.1 Diagram of Angle Measurement Principle of Inclinometer Sensor SCA103T
传感器输出与倾斜角度α有以下关系:

式中 α为传感器倾斜角度,即被测倾斜角度; Vout1、Vout2为传感器输出的差分电压大小;Voffset为传感器的零偏; k1为倾角传感器SCA103T标度因数:16 V/g。
由以上电压和角度对应关系实现了角度信息的测量,它是以重力为输入矢量在空间的状态为基准,进而反应出被测设备的角度。把测斜仪固定在设备的表面,当设备沿某一轴有角度改变时,测斜仪的敏感轴也随之转动一定角度,由于重力的作用,测斜仪对应该敏感轴上的加速度会发生改变,进而输出的差分电压也会发生变化,因此可以根据MEMS倾角传感器输出信息的变化来反映被测设备或物体的角度偏转。
2 硬件实现
该高精度双轴测斜仪硬件系统由SCA103T-05D及外围电路、滤波电路、AD采集电路、STM32F103及其外围电路、数据通信电路等组成。其硬件系统框图见图2。

图2 电路系统Fig.2 Block Diagram of Circuit System
该双轴测斜仪采用+12 V供电,通过LDO将12 V转化成5 V、3.3 V、2.5 V等各模块所需的电压值;MEMS传感器的测量角度为±30°,当传感器在相应敏感轴方向有角度变化时,输出的差分电压会对应变化,再经过调理电路中的滤波电路,送给ADC,ADC采集到的电压输入范围为 0~5 V,处理器再通过控制ADC进行相应角度解算。
为了保证整个系统的测量精度,A/D使用AD公司的AD7734。该A/D具有24-bit高分辨率,输入电压范围可以设置为+5 V、±5 V、+10 V、±10 V,供电电压为5 V,采用SPI通信,可以同时采集4路信号,已成功用于多个工程项目,技术比较成熟。本文所提到的高精度双轴测斜仪系统仅需要同时采集两只倾角传感器的差分输出信号。因采集到的电压范围为0~5 V左右,故在程序AD初始化中,将AD的采样输入电压范围设置为+5 V。
STM32F103内核是32-bit Cortex-M3处理器,最大时钟频率可以达到72 MHz,拥有足够的外设资源,包括2个16-bit看门狗定时器、定时器、2个SPI,2个I2C以及3个串行通信模块等,芯片价格低、功耗低、外设资源足够、处理速度快,满足使用要求。
3 软件实现
3.1 程序流程
程序设计包括 SPI通信、数据处理、串口通信、定时等。测斜仪加电后自动开始工作,首先STM32F103对使用到的各个片上资源及外部被控制器件进行配置,然后主函数不断循环采集、滤波、计算、补偿、滤波,直到定时中断发生,该中断在串口中断服务子程序中实现,中断完成后再返回主函数,不断循环采集处理、中断、发送,其软件系统流程如图3所示。

图3 软件系统流程Fig.3 The Flow Chart of the Software System
3.2 角度精度补偿
利用标定装置对该测斜仪进行初步测试后,将采集到的数据进行拟合,设计中采用的是六阶分段式多项式拟合,根据拟合系数将角度进行补偿,从而达到预期精度的输出。
设采集角度为),,,(…210=iXi,对应欲补偿的理想输出角度为),,,(…210=iYi,其中,X0为测斜仪的零位输出。由于零位对输出有影响,故将每次采集的角度扣除掉零位,可得采集的有效角度为

则,比例系数Ki为

通过已知数据可以拟合出补偿多项式,记为f ( Xi1),则输出角度 Yi1为

上述即为该测斜仪角度补偿方法。
3.3 上位机采集
图 4为上位机数据采集软件示意。设计中STM32F103通过RS232串口每隔0.5 s发送一次角度数据,采集软件只需要接收角度数据,采用LABVIEW编写上位机软件,设置相应波特率及串口号,可以实时显示测斜仪发送的X、Y轴角度值,方便数据采集和测试测斜仪性能。
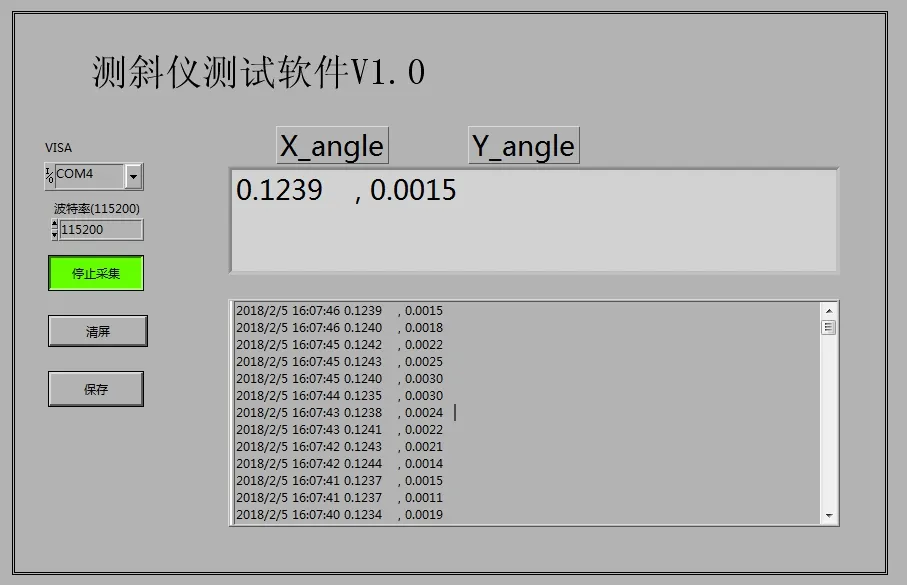
图4 上位机数据采集Fig.4 The Data Acquisition of Upper Computer
4 数据分析
测试过程中,采用逐点间隔1°测试该测斜仪输出的方式,分别测试该MEMS倾角测斜仪在0~30°位置对应输出的角度值,测试设备采用 JST-200数字双轴转台,有效分辨率为1″,置于大理石平板上进行数据标定。通过测试结果表明X、Y两轴测试结果相差不大,均达到预期要求。
4.1 补偿前精度分析
对没有补偿的测斜仪进行测量,测量结果如图 5所示。

图5 补偿前角度与输入角度之差Fig.5 Subscription of Input and Output Without Compensation
由数据及图5可知,补偿前在满量程情况下测斜仪角度输出最大误差超过1°,且输出角度越大,误差也越大,满足不了实际应用需求。
4.2 补偿后精度分析
对补偿前数据进行分析拟合,可以得出相应的满足输出要求的六阶补偿系数,通过角度补偿后的测试数据如图6所示。

图6 补偿后角度与输入角度之差Fig.6 Subscription of Input and Output with Compensation
由图5、图6可知,经过数据补偿,0~±30 °范围内测斜仪的输出精度优于0.005 °。
4.3 0°时2 h稳定性分析
将测斜仪置于0 °,进行2 h稳定性测试,外界温度环境为(20±2)℃,预热 15 min后,测试结果如图7所示。

图7 X、Y轴0°时2 h稳定性Fig.7 Two Hours Stability of the Two Axis at 0°
结果表明,在 0°时,两轴的稳定性基本包络在0.005 °内,达到了较好的稳定性。
4.4 重复性
对测斜仪的两个轴进行重复性测试,外界温度环境一致为(20±2)℃,保持测试状态的一致性,共测试4组,由于数据曲线较多,而且测试结果表明X、Y均满足精度±0.005 °水平,为便于观察,只给出 X轴正、负方向的角度数据,测试数据结果如图8所示。

图8 输出角度与输入角度之差的重复性Fig.8 Repeatability of the Subscription of Input and Output
经过多次重复测量,结果表明测斜仪数据输出稳定,一致性较好,达到±0.005 °的精度。
5 结 论
本文设计的高精度倾角测斜仪具有体积小、重量轻、精度高、功耗低、响应速度快等优点,在全量程0~±30 °测量范围内,精度达到±0.005 °,2 h稳定测量精度达到±0.005 °,适应于精度要求高的场合。可以应用到民用领域及航空航天等国防军事领域。
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
上海师范大学学报·自然科学版(2022年3期)2022-07-11
建材发展导向(2021年15期)2021-11-05
北京汽车(2021年3期)2021-07-17
科学大众·小诺贝尔(2021年10期)2021-01-22
大众投资指南(2020年10期)2020-07-24
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
电子制作(2019年9期)2019-05-30
计算机应用(2016年10期)2017-05-12
人生十六七(2016年14期)2016-12-01
