
海洋运载平台控制技术的发展趋势
2018-12-25 09:34杨毅江涛柯俊陈汇资
自然杂志 2018年6期
杨毅, 江涛, 柯俊,陈汇资
上海大学 机电工程与自动化学院, 上海 200444
在陆地资源和发展空间日趋紧张的情况下,海洋已成为临海国家获取更多资源和更大发展空间的主渠道。海洋运载平台是当前世界各国开发、利用海洋最直接的一种通用手段,其主要包含三部分:智能平台本体、智能平台控制系统和多功能任务载荷系统。平台本体是基础,搭载着控制系统设备和各个测量设备,其稳定性、适航性、抗倾覆性、自扶正能力保证了智能平台能够稳定、高效地执行任务。控制系统是核心,使得平台本体部分具备自主定位、自主航行、自主避障、远程通信等功能,能够以全自动化的方式执行用户设定的任务。多功能组合任务载荷系统能够搭载不同型号、不同用途的测量设备,使得智能平台满足多种作业任务的需求,极大地拓展了智能平台的适用性。其中,控制系统是决定海洋运载平台功能和性能的主要因素,在一定程度上制约着海洋运载平台技术的发展和应用。它的主要任务就是控制海洋运载平台在工作空间中的运动位置、姿态、轨迹、操作顺序及动作的时间等。因此,为了更好地发展面向未来的高性能海洋运载平台,我们结合当前的平台控制技术、未来的实际作业需求与实体控制技术发展形势,对海洋运载平台控制技术展开深入探讨和分析。
1 研究现状
海洋运载平台面向动态定位[1]、轨迹跟踪[2]和路径跟随[3]等任务需求,利用传感器感知的位置、姿态和外部信息,使运载平台具备“经验丰富驾驶员”的控制能力,成功稳定地做出各种航行任务动作。随着控制理论研究的发展,海洋领域相关研究人员将当前最新相关技术用于提升海洋运载平台的控制性能[4]。
在一定假设条件下,海洋运载平台有相应的数学模型,并能对其进行模型辨识[5]。尽管精确和完整的平台模型对于控制具有十分重要的意义,但是在数学建模过程中存在两方面问题:一是数值模型的建立十分困难、代价高且耗时;二是由于平台本身运动状态改变、外部干扰、质量变化和传感器观测值不确定等因素都会导致平台模型的不确定性,从而影响基于模型控制器的性能,甚至导致系统不稳定。
海洋运载平台控制器设计通常根据其所面临的任务和主要挑战进行设计。海洋空间包括水面与水下,相应地,海洋运载平台包括水面运载平台和水下运载平台两大类。水面运载平台的控制面临模型高度非线性和不确定性、系统欠驱动、船体本身及执行机构时滞性、执行机构饱和特性、不可预测的强外部干扰和系统故障等挑战[6]。针对欠驱动问题,可以采用反步法和李雅普诺夫直接法来解决[7];针对非线性问题可以采用反步法解决[8];针对抗干扰问题可以采用逼近控制方法[9]。另外还可以采用智能控制方法同时解决无人船模型不确定性、非线性和外界干扰问题[10-11]。由于水面运载平台模型和所面临运行环境的复杂性和动态性,实际应用过程中通常采用复合控制结构和方法以提升控制性能[9]。
从控制角度来看,将水面运载平台的控制设计应用于水下运载平台在原理上完全可行[6]。尽管如此,需将水面运载平台在二维平面的运动控制扩展至三维空间运动控制,即需要考虑垂直方向的运动控制[12]。水下运载平台控制面临的主要挑战包括水下平台高度非线性和自身运动耦合性、平台水动力参数不精确导致的模型不确定性、不确定外部干扰(系绳力、末端执行器有效载荷力和洋流等)以及欠驱动性[13]。目前应用于水下运载平台的控制方法有神经网络控制[14]、自适应控制、PID控制[1]和S面控制等。
实际工程应用中,对于海洋运载平台这种大惯性系统[9],执行器在响应速度、饱和度和耐用性等方面存在约束。控制器指令和实体执行并不等同。控制器的设计过程中若没有考虑这些因素将会极大地降低控制器的性能甚至发散。虽然很多控制器考虑幅度和速率约束,但是并没有考虑驱动器和水面运载平台整体系统的动态特性。
当前已有不少研究者对海洋运载平台提出了很多新的控制策略,并通过相应的仿真或实体平台进行验证。随着对海洋的开发和利用,人类对海洋运载平台要求越来越高,相应地对控制性能的需求也逐步提升。目前,海洋运载控制存在以下问题:
(1)目前很多海洋运载平台控制方法是在有规律或小干扰条件下进行仿真测试,无法满足实体海洋环境各种不规则复合干扰条件下的平台控制要求;
(2)虽然关于海洋运载平台已有很多模型,但是随着平台本体运动状态和物理属性的改变,平台模型随之也会发生改变,单一模型无法满足控制要求;
(3)虽然有些控制方法可应用于实体平台,但是方法自适应能力差,即无法适用于不同平台和不同环境;
(4)现有控制方法可以在仿真平台之间实现同质甚至异质平台之间的相互协同,然而无法适用于实体协同,并且协同过程中没有有效考虑人员因素。
海洋运载控制系统在模型不确定性、干扰时变、未知性和多平台之间协同等方面需要根据实际控制系统的应用需求进一步研究。
2 挑战与发展趋势
从控制层面看,海洋运载平台本身和其所面临的运行环境较空中和地面运载平台有其特有的挑战性。单体海洋平台控制面临的挑战主要包括平台本身和外部环境两部分。平台本身挑战为平台本体惯性大、模型高度非线性等。外部环境挑战主要是环境恶劣、干扰强且变化大等。另外,海洋广袤,为扩大海洋运载平台的效能,需多个海洋运载平台进行有人和无人及其水面和水下相互协同。为此,面向任务和控制需求,研究能有效应对强时变干扰、惯性大、高度非线性和系统欠驱动的单体海洋运载平台控制系统及其同质和异质多平台协同控制系统是未来海洋运载平台的发展趋势。
为解决上述挑战,未来海洋运载平台控制主要包含如下4个研究方向:海洋环境干扰估计及预测、海洋运载平台模型估计及预测、类人海洋运载平台控制、控制任务分解和综合及其机群和人的交互协同控制。
3 未来海洋运载平台控制技术
3.1 重要性及可能性
自20世纪以来,世界人口呈现井喷式增长,很多陆地资源无法满足人类生存所需。海洋中蕴藏着丰富的矿产、生物和金属等各种资源。目前,美国、英国和日本等世界主要海洋强国都先后将海洋开发及其权益维护上升至国家战略层面,均投入大量人力、物力和财力争相发展海洋技术。
海洋运载平台属于机器人系统中的一类。同其他机器人系统一样,海洋运载平台能维护我国海洋权益,可提升我国开发和利用海洋的能力,是实现海洋强国非常重要的一类高端海洋装备。海洋运载平台可以根据实际任务需求搭载不同载荷设备,用于执行特别危险、特别枯燥以及其他不适于有人平台执行的任务。军事方面,海洋运载平台可以从侦查、威慑、抵制威胁和攻击等方面成为海军的主要力量倍增器;民用方面,其可以从资源勘测、水文和地形调查等方面成为各海洋部门的主要功能倍增器。同时,海洋运载平台与平台之间、与人员之间进行相互协同,可进一步提升其效能比。控制是决定海洋运载平台功能和性能的主要因素,在一定程度上制约着海洋运载平台技术的发展和应用。
美国和欧洲等海洋强国通过迭代递归制定总体战略规划和相关项目,指引其海洋运载平台稳步有序发展。2007年,美国海军海上系统司令部(NAVSEA)制定了《海军无人水面艇总体规划》,表明美国将在未来相当长的时间内持续进行无人艇的开发研制。此后,美军方开始统筹各军种无人系统发展,并统一发布《无人系统路线图》。2016年,美国国防科学委员会发布了《下一代水下无人系统》报告。在“2016无人驾驶船舶技术研讨会”上,罗尔斯•罗伊斯公司推出了“高级无人驾驶船舶应用开发计划”(AAWA),并发布了AAWA 项目白皮书,阐述了该项目如何实现遥控与无人驾驶船舶的美好愿景,并规划了到2035年的发展目标。
在我国“一带一路”宏观战略规划中,海洋起着至关重要的作用。2016年,国家发展和改革委员会、科学技术部、工业和信息化部、中共中央网络安全和信息化委员会办公室制定的《“互联网+”人工智能三年行动实施方案》中,海洋运载平台的设计、研发、推广工作被列为重点实施项目。
近年随着传感器技术的发展,其感知和处理信息越来越实时、准确和完备,可为系统控制提供稳定的输入数据源;水上/水下通信和定位等信息处理技术为海洋运载平台的远距人机交互和定位提供技术支撑;水面和水下运载平台及其相关技术的发展为控制技术的研究和应用提供平台;大数据、人工智能等技术的兴起为控制技术的发展和应用提供了新的工具和舞台。为此,将传统控制技术同传感技术、信息技术和人工智能技术等结合,以实际挑战和问题为导向,以应用为目的,将应用和理论交互结合,是未来海洋运载平台控制器的主要任务。
3.2 远景目标
未来海洋运载平台控制器将态势响应同态势感知和人机交互结合,使海洋运载平台具备“经验丰富驾驶员”的驾驶控制能力,实现在非受控环境下自主/半自主控制,满足各种复杂任务的航行控制需求。要实现上述目的,控制器需感知外部环境干扰和内部自身状态变化,对外部干扰和内部状态进行估计和预测,形成控制态势感知图;利用人工智能方法学习人工驾驶策略,增强人机交互作用,在一定程度上实现自主/半自主控制分解和综合,具备多平台协同自主/半自主控制能力;同时保证控制器的控制精确性和智能性,从而满足非受控环境下的复杂多任务对控制精度和控制应变能力需求。具体需要具备以下功能:
(1)外部强干扰实时感知和预测
海洋运载平台在海洋环境操作中,通常会遭遇外部不定期的强干扰。对于水面运载平台而言,其干扰主要包括风、浪和涌流等;而水下运载平台干扰主要包括末端执行器有效载荷力和涌流。如果干扰大且不可预测,则会造成控制系统不稳定,影响海洋运载平台的安全性能。为此,实现海洋运载平台稳定控制需发展相应的干扰感知传感器及其相应的处理和预测理论,为后续控制方法提供有效表征的干扰。
(2)模型感知和变化预测
海洋运载平台在航行和作业过程中,其本身重心和浮心会发生瞬间和缓慢变化,同时平台水动力参数难以进行准确估计。这就需要建立平台本体模型的实时感知系统,对平台自身有个准确评估。特别是对于瞬间变化模型应有预测功能,从而及时调整控制器,以应对瞬间模型变化而导致的控制发散问题。
(3)大数据驱动驾驶能力学习
驾控人员能根据感知到的局部环境信息在多种航速下作出各种体现驾驶技术的操作。海洋运载平台可以通过录入驾控人员的驾驶数据,构建相应的策略和价值函数,通过自我学习提升驾驶能力。
(4)大数据驱动的控制任务分解和综合能力学习
人类在完成某个简单的任务时靠一个人即可完成。当任务复杂度增加时,需要对任务进行层次化分解,然后综合。为此,海洋运载平台完成任务时,可通过学习的方法,使其具有自主任务分解和综合能力。分解出的子任务可以通过平台的自主演化行为完成,也可以通过一定规则让平台完成,还可以分配给操控人员完成。分解的各子任务模块可以借用已有模块,也可重新开发。
(5)海洋运载多平台人机交互协同
不管海洋运载平台自主能力多强,其终究是为人类服务,降低人类海洋作业的危险和减轻长期出海作业的压力,从而将人类解放出来的大部分时间去从事更高层的工作。人类终将是主宰者,海洋运载平台的智能性无法同人类相比。海洋运载平台在作业过程中能实现其同人类的无缝对接,在发挥平台精准执行力的同时借助人类的智能。这要求海洋运载平台控制器同时具备控制精确性和控制智能两种能力,从而使一个人能同时操控数量足够多的海洋运载平台,提升其效能比。
3.3 研究方向
海洋运载平台应面向实际需求,以提升工作效能、实现人和机群无缝协同为目标,将传统控制技术、传感技术、人工智能技术和人机交互技术等相互结合,构建海洋运载平台控制理论体系和工程技术架构,使海洋运载平台控制器同时具备控制精确性和控制智能两种能力,从而满足非受控环境下的复杂多任务对控制精度和控制应变能力的需求。为实现上述目的,让海洋运载平台具备期望功能,需针对如下方向开展研究:海洋环境干扰估计及预测、海洋运载平台模型估计及预测、类人海洋运载平台控制、控制任务分解和综合及其机群和人的交互协同控制。各研究方向及其相关技术之间的关系如图1。
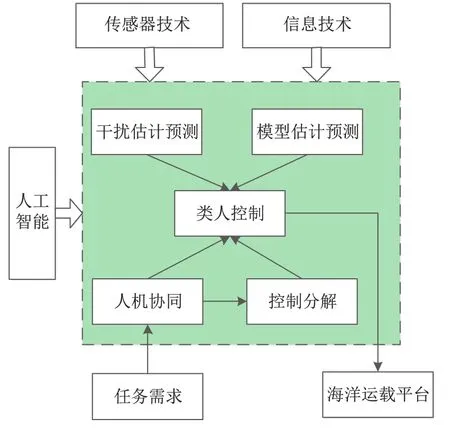
图1 海洋运载平台研究方向的体系架构
具体研究方向包括以下几个方面:
(1)海洋环境干扰估计及预测
海洋运载平台在海洋操作环境中,通常会遭遇外部不定期的强干扰。如果海洋运载平台在控制过程中无法对干扰进行准确估计和预测,则通常会导致控制过程失效,从而使海洋运载平台系统失衡,引发事故。目前海洋干扰不仅探测手段有限,而且估计精度不高,预测不准确。这些在很大程度上限制了控制方法在实体平台中的应用。为此需发展如下海洋运载平台干扰估计技术:海浪估计与预测、风干扰估计与预测、涌流估计与预测。风浪流估计与预测的研究框架如图2。在对海洋环境干扰估计和预测中需利用多传感器信息融合处理和估计理论,实现对海浪、风速和流速等主要干扰的幅度、空间和时间分布规律的估计和预测。
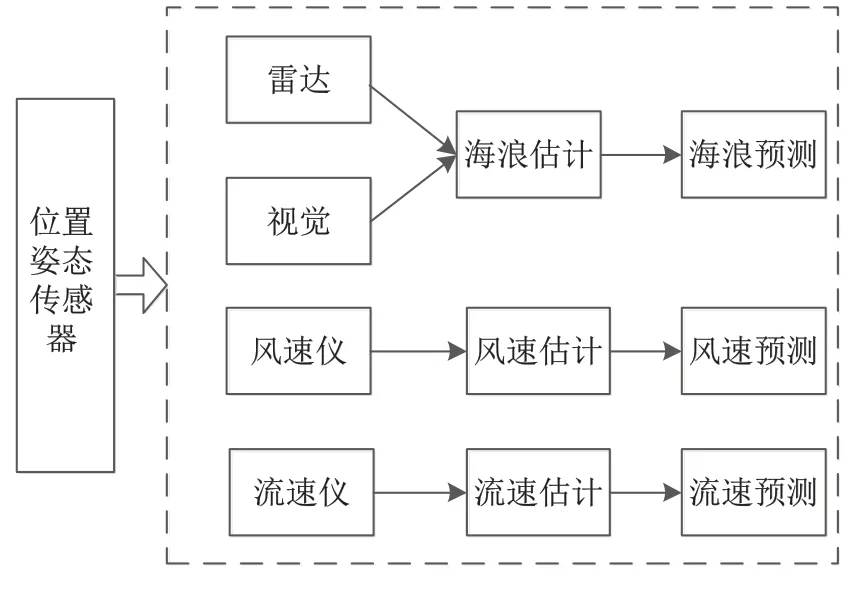
图2 风浪流估计与预测
①海浪估计与预测
海洋运载平台在海面运行时,经常面临较大的海浪。海浪对水面运载平台影响很大。比如水面运载平台侧浪航行时会造成很大的横摇,危及平台安全。为此可以利用船体姿态数据,结合雷达、视觉等传感器,利用雷达数据处理和图像处理方法,对两者数据进行融合,从而实现海浪实时估计。同时依据估计结果,进行海浪预测,使水面运载平台能够对海浪实施主动抗干扰控制。
②风速估计与预测
海洋运载平台在海面运行时,也经常面临大风干扰。特别当水面运载平台通过海峡通道或当船体截面较大时,风速对船体运动的影响很大。为此应用风速仪来采集相关干扰数据,采用信号统计估计和预测理论,建立风速干扰模型,实现对风速进行预测和估计,使水面运载平台能够对风实施主动抗干扰控制。
③涌流估计与预测
海洋涌流对水面海洋运载平台和水下海洋运载平台都有很大影响。特别是岛礁和潟湖等附近存在变化比较剧烈的涡流,会严重威胁海洋运载平台的安全。为此应利用流速仪,采用信号统计估计和预测理论,建立涌流干扰模型,对涌流进行干扰估计和预测,使海洋运载平台实施涌流主动抗干扰控制。
(2)海洋运载平台模型估计及预测
海洋运载平台在航行和作业过程中,其本身重心和浮心会发生瞬间和缓慢变化,同时平台水动力参数难以进行准确估计。为实现平台模型实时估计及预测,需开展如下研究:水动力参数估计、缓慢模型变化估计及预测、瞬间模型变化估计及预测。海洋运载平台模型估计与预测研究框架如图3。海洋运载平台模型估计及预测应根据受力分析、位置和姿态传感器之间的变化建立映射关系,实现瞬时模型变化和缓慢模型变化估计与预测;通过数值水槽仿真初步建立水动力参数离线估计,通过在线学习实现水动力参数的在线估计和预测。
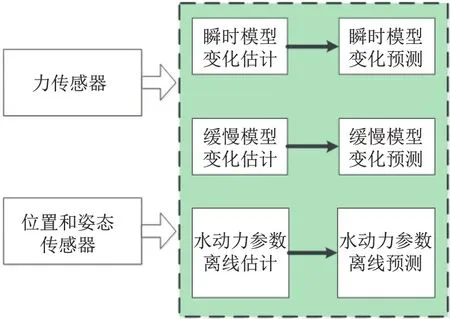
图3 海洋运载平台模型估计与预测
①瞬时模型变化估计与预测
海洋运载平台在海洋作业过程中,比如收放设备过程和平台本身速度发生瞬间改变时,会发生模型瞬变。这时更需要海洋运载平台能实现对其自身的稳定控制。为此应研究将平台自身位置、姿态变化、受力情况和相应的先验知识进行对应,建立映射关系,实现对平台模型瞬间变化进行有效、及时估计。
②缓慢模型变化估计与预测
海洋运载平台在海洋作业过程中实际上经常会发生模型缓慢变化,比如平台自身缓慢变速,平台内的油量逐渐减少。模型缓慢变化的积累会逐渐影响平台的控制性能。为此,应根据平台自身的状态改变建立缓慢变化模型,实现对平台模型进行自适应估计和预测。
③水动力参数估计
平台本身水动力参数通常难以准确获取,并且代价高。这就需要通过建立数值水槽实现水动力参数的离线粗估计,然后依据迭代演化学习方法对平台的水动力参数进行在线学习修正。
(3)类人海洋运载平台控制
海洋运载平台控制的最终目的是使海洋运载平台具备“经验丰富驾驶员”的驾驶控制能力,然后根据自身状态和任务需求,精确、高效地完成各项预定任务。驾控人员能根据局部环境感知信息,在多种航速下能做出各种体现驾驶技术的操作。为此基于机器学习理论,建立任务和环境信息的特征表征模型,研究学习人的驾驶技能方法,建立人类驾驶经验和特征模型之间的对应关系,使海洋运载平台具有类人驾驶能力。类人海洋运载平台控制研究框图如图4。
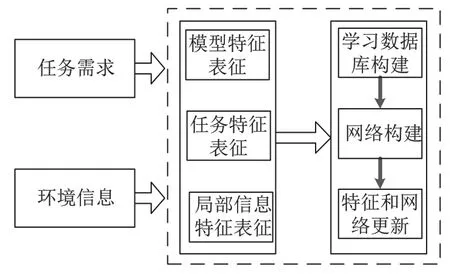
图4 类人海洋运载平台控制
①信息特征提取及表征
驾控人员基于当前环境理解,作出各种熟练操作。这种理解包括船体模型和性能理解、当前局部任务理解和当前环境感知理解。为实现海洋运载平台的类人驾驶能力应开展船体模型特征提取和表征、任务特征提取和表征,以及多维度、多尺度情景认知特征提取研究。这些工作为操控驾驶学习提供统一的特征表达。
②类人驾驶能力学习
通过获取任务信息、传感器信息和驾驶员操控信息,并利用前面获取的特征统一表征形式,需要开展驾驶能力学习数据库构建、价值网络和策略网络构建、学习网络和特征表征迭代演化研究。
(4)控制任务分解和综合
目前很多控制方法在完成某一简单控制任务时性能不错,而当控制任务复杂度增加时,其无法满足控制性能要求。为此海洋运载平台控制器应借鉴人类通过分工完成复杂系统任务的思想,来实现复杂任务的控制。为此,需针对控制任务自主分解、控制任务同控制模块关联、控制任务标准模块库构建开展研究。控制任务分解和综合研究框图如图5。为此应建立任务复杂度和分解层次的评价函数,基于优化理论,实现复杂任务自主分解;构建任务综合和模块匹配评价函数,基于优化理论,实现复杂任务的综合求解。
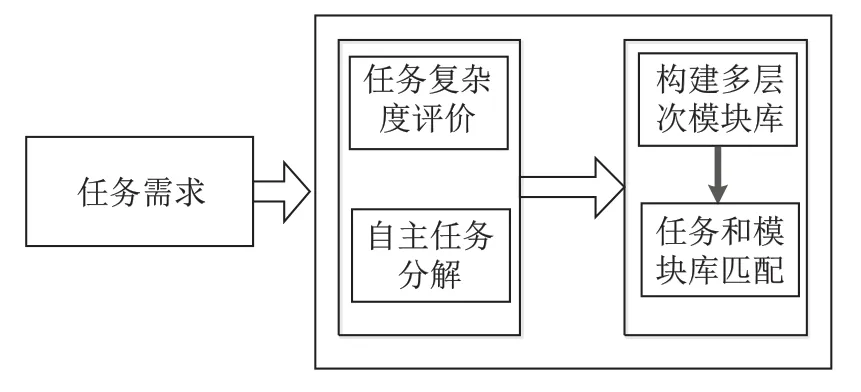
图5 控制任务分解和综合
①控制任务自主分解
复杂控制任务很多时候无法通过单一方法和单一层次解决。海洋运载平台在实际作业过程中会面临很多复杂的任务,特别是复杂环境下多任务、多平台协同作业。为此应基于人类解决复杂任务过程中分工的思想,面向任务需求开展任务复杂度评价研究,通过监督学习方法实现自主和半自主任务的层次化分解,为后续控制器的设计和重复利用建立基础框架。
②控制任务综合
任务分解后,通常需要为各子任务设计控制器。然而这没有利用已有的控制资源,导致效率低下。为解决此问题首先需要建立控制任务多层次标准模块库,这样子任务可以根据分解情况选择相应的子模块库,同时子模块库的选择也可变成自主行为。这就需要研究子控制任务同子模块之间的关联方法。基于控制任务分解结构、构建的标准子模块库、子控制任务和子模块的关联度,实现控制任务综合。
(5)机群和人的交互协同控制
面对浩瀚且恶劣的海洋和复杂的作业任务,单海洋运载平台能力和智慧显得格外低。为此,可通过海洋运载平台同其他运载平台和人群之间的相互协同,发挥各自优势,使运载平台同时体现高效性和智能性。从控制层面需要开展海洋运载平台之间协同控制,以及操控人员同海洋运载平台之间的协同控制。机群和人的交互协同控制研究框图如图6所示。通过将异构系统进化和混合增强智能进行结合,实现机群和人的交互协同控制。

图6 机群和人的交互协同控制
①海洋运载平台之间协同控制
水面运载平台之间协同能提升平台之间的鲁棒性、适应性等能力。为此,应针对实际特定任务需求,比如海洋测绘和海域巡逻等,研究实体环境下编队、回归、分散等基本动作的协同控制,基于异构平台合作协同进化理论,通过控制任务分解和合成实现其他更复杂任务的协同控制。
②操控人员同海洋运载平台之间的协同控制
由于海洋运载平台的智能性无法同人类相比,海洋运载平台在协同过程中仍需要操控人员参与,形成多海洋运载平台之间协同方式是未来协同控制系统的一个主要研究方向。为此,需从控制层面,针对操控人员同海洋运载平台之间的协同控制,基于混合增强人工智能,开展控制任务分解协同、控制任务综合协同、驾驶控制协同。
4 海洋运载平台控制发展路线图
海洋运载平台控制发展路线图如图7。2016年国家发展和改革委员会、科学技术部、工业和信息化部、中共中央网络安全和信息化委员会办公室制定的《“互联网+”人工智能三年行动实施方案》和《机器人产业发展规划(2016—2020)》为代表的一系列相关政策规划成为推动我国海洋运载平台控制的重要助力。到2030年和2040年,我国将分别在海洋运载平台的干扰估计与预测、模型估计与预测和类人控制、控制任务分解与综合及其机群与人之间协同控制方面取得基础理论的重大突破,初步建立海洋运载平台控制体系,部分技术与应用达到世界领先水平,在无人海洋运载等领域得到初步应用。之后,通过几个发展阶段,逐渐提高海洋运载平台控制的水平并扩展应用范围。2050年,我国海洋运载平台相关理论、技术与应用将达到世界领先水平,形成较为成熟的理论与技术体系,在类人控制学习和自主任务分解及综合等领域取得重大突破。在海洋运载平台领域能够实现智能自主控制,形成涵盖核心技术、关键系统、支撑平台的完整产业链,推动我国高端海洋装备相关理论和产业发展。
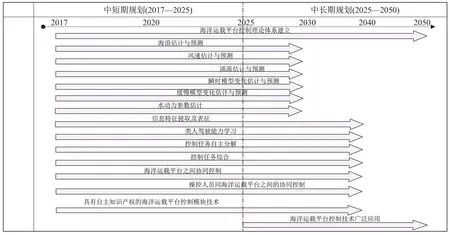
图7 海洋运载平台控制发展路线图
5 结论
世界是海洋的世界,谁能在海洋运载平台领域取得技术突破,必将占得海洋开采的先机。海洋运载平台控制技术作为整个系统的核心,在平台作业过程中起着举足轻重的作用。本文着眼于新形势下海洋发展契机,结合我国促进海洋运载平台发展的相关战略政策与海洋运载平台控制技术发展趋势,从海洋运载平台控制技术的重要性与可能性、平台应具备的功能和控制技术应着重发展的研究方向等几个角度对平台控制技术进行了深入分析,并制定了海洋运载平台控制发展路线图。
(2018年9月17日收稿)■
猜你喜欢
黄河之声(2022年10期)2022-09-27
中学生数理化(高中版.高二数学)(2022年4期)2022-05-25
中学生数理化(高中版.高二数学)(2022年4期)2022-05-25
中学生数理化·高二版(2022年4期)2022-05-09
新班主任(2022年4期)2022-04-27
科学大众(2020年23期)2021-01-18
汽车观察(2019年2期)2019-03-15
琴童(2017年7期)2017-07-31
小学科学(2017年5期)2017-05-26
中国卫生(2016年5期)2016-11-12
