消费级无人机采煤沉陷地地形数据采集飞行方案优选
2018-12-20 08:40闫皓月赵艳玲田帅帅张建勇邹玉珠陈佳乐
中国矿业 2018年12期
闫皓月,赵艳玲,田帅帅,张建勇,邹玉珠,陈佳乐
(中国矿业大学(北京)土地复垦与生态重建研究所,北京 100083)
采煤导致的大量采煤沉陷地,严重破坏了矿区的耕地资源与生态环境。在平原区采煤沉陷地有两个特征,一是采煤沉陷地呈现出盆地状,地形通常呈连续变化,二是在高潜水位矿区,采煤沉陷地内易积水并生长大量植被。进行土地复垦是缓解矿区人地矛盾和恢复生态环境的有效办法,而获取采煤沉陷地的高精度地形数据是土地复垦的前期基础工作,是计算复垦区域的挖填方量以及配套设施规划设计的依据[1]。利用全站仪、GPS等仪器进行的传统测量方法,耗时耗力,常规的遥感、航空摄影测量严重受气候、场地条件制约,获取影像分辨率较低,且绝大多数的监测是用于分析平面变化[2],也不能满足快速获取高精度地形图的需求。近年来,无人机遥感能够快速获取国土、资源、环境等空间遥感信息,在各个行业的发展日益成熟[3-4]。尤其在高精度地形图获取方面优势明显。消费级无人机平台根据其小体积、便携带、低成本、高时效与高分辨率等优势[5],为快速获取影像数据提供了保障[6],正逐步成为小范围、困难地区快速测量的主要途径。
本文以山东省邱集煤矿某采煤沉陷地为研究对象,采用大疆M100四旋翼消费级无人机,在同一航高120 m下,设计了2种像控点的布设方案和6种像片重叠度,以此12种飞行方案来探究消费级无人机获取采煤沉陷地地形数据的精度问题,为利用该型号无人机进行采煤沉陷地地形数据采集提供了方案借鉴。
1 研究区概况
研究区位于山东省德州市齐河县马集乡的邱集煤矿,地理坐标为东经116°23′45″~116°31′07″,北纬36°26′07″~36°30′57″。邱集煤矿因采煤原因造成地表下沉形成了采煤沉陷地,本研究选取其中一处,面积为0.37 km2。经现场踏勘,该实验测区主要是沉陷地和农田,周围没有机场、高楼、高压线等影响无人机起降的区域,在测区内选择起降场地较容易,展开飞行任务是可行的。
2 研究方法
2.1 无人机平台与载荷
无人机平台主要包括机体系统、机载系统、发射与回收系统、测控系统、飞控系统、数据链路系统、电源系统等。最常见的无人机飞行平台包括固定翼无人机平台、旋翼无人机平台等[7],一般应用于航测的无人机主要是基于固定翼和多旋翼两种。无人机上挂载的相机可以大致分为量测型相机和非量测型相机两种。
研究选用四旋翼无人机DJI Matrice 100平台,搭载非量测型相机Zenmuse X3数码相机。平台与载荷的主要参数见表1。
2.2 控制点布设
地面控制点是基准数据源[8],为了控制及检验飞行数据精度,共布设14个地面控制点,其分布见图1。按照区域网布点方案进行[9-10],利用矿区已知的高精度控制点,采用附合导线的方式,选择索佳SET550X型全站仪进行布控。在后续数据处理中,将其区分为像控点和检查点使用。
2.3 飞行方案设计
为验证不同飞行方案对数据质量的影响,结合《低空数字航空摄影规范》(CH/Z3005—2010)的相关规定,采取120 m飞行高度,共制定了12套飞行方案,为2种地面像控点布设方案和6种像片重叠度方案交叉形成。
其中,地面像控点布设方案为:方案一选择1号点、3号点、7号点、9号点和13号点5个控制点为像控点,其余为检查点;方案二选择1号点、2号点、3号点、5号点、7号点、9号点、12号点、13号点和14号点9个点为像控点,其余为检查点。
像片重叠度设计按照《低空数字航空摄影规范》(CH/Z3005—2010)的要求[11],本着高效飞行,规划合理重叠区间的目的,将像片进行重叠度设计,见表2。

图1 外业布设点位图
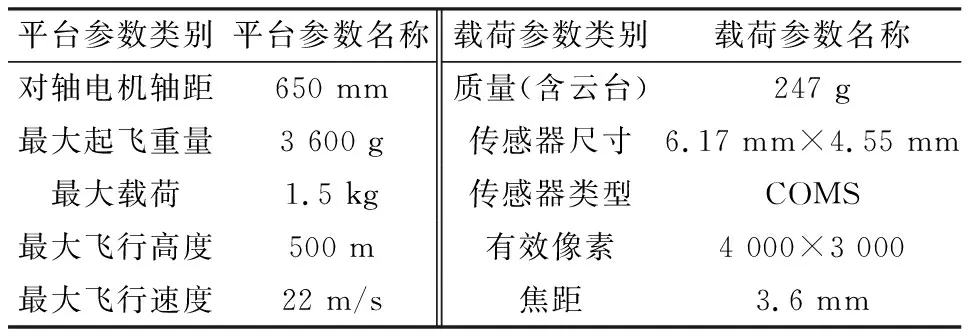
表1 无人机平台和任务载荷的主要参数
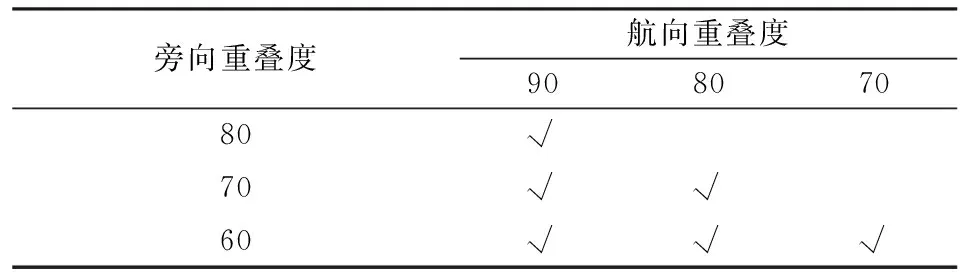
表2 航拍像片重叠度表
即航向、旁向重叠度的组合分别为7060、8060、8070、9060、9070、9080,共计6种。
2.4 数据采集与处理
由于沉陷地内植被生长与积水对航拍数据存在较大影响,故本研究选在沉陷地内植被稀疏水位较低的时间段内进行。具体选在2017年3月30日到4月5日之间进行了航测数据的野外采集。内业数据处理软件选择Pix4Dmapper,该软件操作简单,算法优质,可自动实现相机畸变改正得到高精度三维重建模型。
3 结果分析
3.1 飞行质量评价
经检验,本研究航摄影像数据色调均匀、饱和度好,无云雾遮挡。重叠度以9080为例,最大航向重叠度为95.80%,最小航向重叠度为86.27%,最大旁向重叠度83.89%,最小旁向重叠度为74.39%。最大航带弯曲度为0.297%。相邻像片的最大航高差为 1.31 m,航带最大最小航高差为2.34 m。航向倾角最大值为3.74°,旁向倾角最大值为1.68°,像片旋角最大值为14.5°,各项指标均符合规范要求。
3.2 平面精度分析
已有相关研究表明,无人机地形图测绘的平面精度较高,因此,本实验仅用有限个检查点对12组方案的平面精度进行验证。以检查点的点位中误差作为12组方案下成图平面精度的评估依据[12],计算结果见表3。由表3可知,12种飞行方案获取的航摄影像数据平面精度均满足《数字摄影测量 空中三角测量规范》(GB/T 23236—2009)中规定的比例尺1∶500的精度要求(表4)[13]。
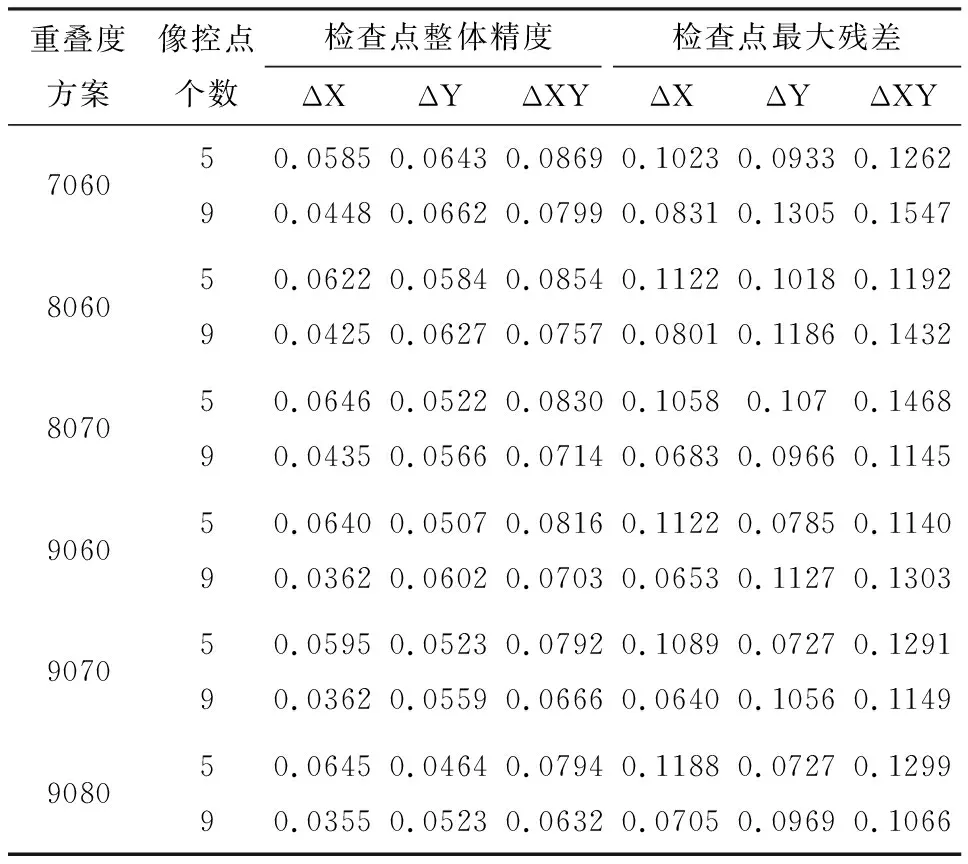
表3 航测影像平面精度检查表

表4 GB/T 23236—2009中各比例尺成图精度的要求
从表3可以看出,在研究区范围内,增加像控点的个数能有效提高航摄影像的平面精度,5个像控点和9个像控点时像片的平面精度分别为0.0792~0.0869 m和0.0666~0.0799 m,9个像控点的最低精度与5个像控点的最高精度无差异。增大重叠度,平面精度也在提高,但随着重叠度的不断加大,精度趋于稳定,并不是重叠度越高平面精度就一定越好。
综上可知,消费级无人机采用9个像控点时采集的影像平面精度均较高。
3.3 高程精度分析
无人机航拍数据的高程精度往往较差,尤其是体现在水域和植被较多的区域[14],所以本实验选在3月底进行数据采集,此时沉陷区域裸地较多,植被低矮稀疏,可将生成的DSM近似认为是DEM进行分析。为保证精度分析结果的可靠性,本实验以全站仪实测928个碎部点进行统计和分析,碎部点分布见图2。
经统计,12组飞行方案的高程中误差计算结果见表5。

图2 碎部点布设示意图
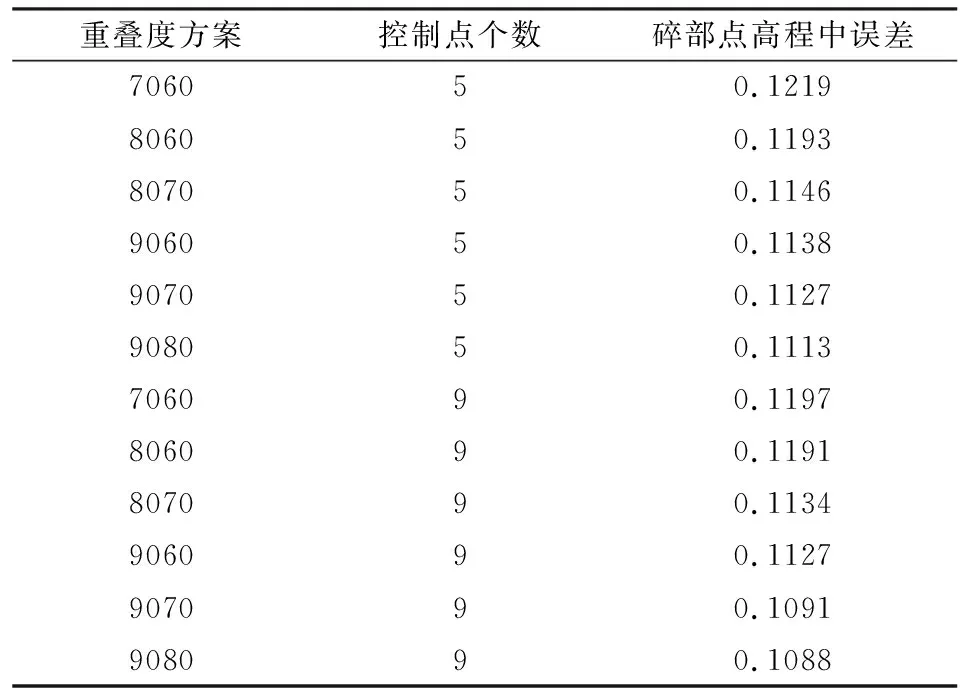
表5 航测影像高程精度检查表
由表4可知,本次飞行试验获取的影像数据高程精度均满足比例尺1∶1 000的精度要求。
选取研究区内具有代表性的部分沉陷区,利用碎部点数据插值生成实测DEM,再与航测数据进行差值计算即可更直观地对高程精度进行评价,以9个像控点、重叠度9070的航测数据为例,差值结果展示如图3所示。

图3 航测DEM与实测DEM差值结果图(注:图中高程精度较差部分为水域)
综合分析可知,布设9个像控点、重叠度为9070或9080时,高程精度最高,重叠度为8070或9060时,高程精度较好。
3.4 时间成本分析
为了寻求高效高质量的飞行方案,对12个方案花费的理论时间成本进行了简单分析。
像控点布设成本:采用索佳全站仪野外布设像控点时包括测量、转站以及制作控制点位标记等工作,布设5个像控点时消耗的理论时间为2 h,布设9个像控点时消耗的理论时间为4 h。
不同飞行方案的影像张数、外业架次、飞行时间、内业处理时间等信息见表6。
由表6可知,随着像片重叠度逐渐增大,像片数量增加,相应飞行时间、内业处理的时间也会增多,最快与最慢的方案相比,可节省5.55 h。总体来说,各个方案消耗的时间差距并没有非常明显,但当飞行面积增加时,需要根据表6的数据进行适当推算,再结合各个重叠度方案的成像精度,综合考虑哪一种才是最佳。就本实验来说,9个像控点、重叠度为8070的方案具有较高性价比。该方案的正射影像图(DOM)和数字表面模型(DSM)见图4。通过生成的DSM即可得到相应比例尺的地形图。

表6 不同像片重叠度航拍花费时间比较表
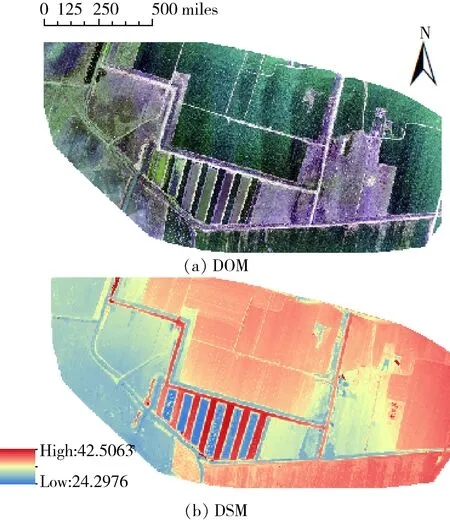
图4 9控重叠度8070数字正射影像图(DOM)、数字表面模型图(DSM)
4 结 论
1) 增加控制点的个数和像片重叠度可以有效提高消费级无人机航测影像的精度,但当重叠度增大到一定程度时,精度提高的幅度趋于稳定。
2) 12种飞行方案获得地形图的平面精度均满足1∶500的精度要求,高程精度均满足1∶1 000的精度要求,其中布设9个像控点、重叠度为9070或9080时高程精度最高。
3) 通过时间成本分析,增加控制点个数会使布控时间增加1倍左右,增大重叠度会增加无人机的拍摄时间、内业处理时间,当测区面积较小时,布设9个像控点、将重叠度设置为9070时采集到的地形数据精度较佳。当测区面积较大时,布设9个控制点,将重叠度设置为8070性价比较优。
猜你喜欢
计算机系统应用(2022年4期)2022-05-10
天津医科大学学报(2021年4期)2021-08-21
全球定位系统(2021年1期)2021-03-26
北京航空航天大学学报(2017年4期)2017-11-23
北方文学(2017年20期)2017-08-01
北方文学·中旬(2017年7期)2017-07-27
科学与财富(2017年19期)2017-07-19
计算机应用(2017年1期)2017-04-17
中国工程咨询(2017年12期)2017-01-31
癌症进展(2015年3期)2015-12-18