
基于L-R算法的运动模糊图像复原
2018-12-19 03:30:46于可欣张天周王新蕊吴宇航
新一代信息技术 2018年1期
于可欣,张天周,王新蕊,吴宇航
(1. 华北理工大学 数学建模创新实验室,河北 唐山 063210;2. 华北理工大学理学院,河北 唐山 063210;3. 华北理工大学机械工程学院,河北 唐山 063210;4. 华北理工大学冶金与能源学院,河北 唐山 063210;5. 河北省数据科学与应用重点实验室,河北 唐山 063210;6. 唐山市数据科学重点实验室,河北 唐山 063210)
0 引言
在生活中我们经常遇到用相机拍摄图片时,由于物体与相机的相对运动而导致图像模糊的现象,陈云龙等[1]通过非线性迭代降质图像复原的算法,建立了模糊图像复原模型,获得较好的复原效果;汪雪林等[2]提出一种基于小波域局部高斯模型的线性图像复原算法,该算法能够较好的再现边缘信息,但信噪比较差;Yuka Nagashima等[3]提出了一种基于Bayesian的点扩散函数PSF原始图像的估计方法,通过从模糊图像的对数振幅谱估计PSF的频带极限来确定PSF的初始值,通过仿真模拟验证了方法的有效性。
1 图像预处理
1.1 图像降质
图像复原技术能够减轻图像因某种原因造成的图像退化问题,从而使图像最大程度的还原真实场景。复原的方法主要有两类:未知模糊图像的先验知识和已知模糊图像的先验条件,处理未知先验知识的图像可对其退化过程建立模型,根据噪声以及退化函数选取合适的算法,尽量使模糊图像做到清晰化,速度较慢;已知模糊图像的先验条件[4]可以直接建立数学模型对退化图像进行拟合,还原效果更好。
未知先验知识情况下的图像复原可以看成预测估计的过程,由已给出的退化图像g(x,y)估计出系统参数H,近而近似地恢复出f(x,y),运动模糊图像的退化模型可以描述为一个退化函数加一个加性噪声项n(x,y),因此图像退化过程的数学表达式可以写为:

上述为原始清晰图像在被退化函数作用后继续叠加噪声的过程,其退化模型图如下:
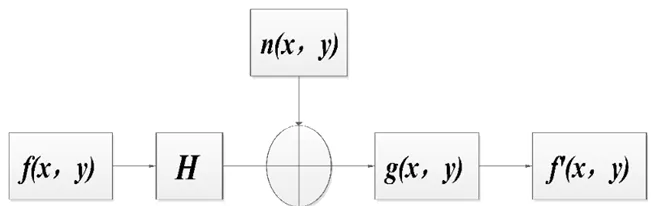
图1 退化模型Fig.1 Degradation model
其中g(x,y)为退化图像,f(x,y)为原始图像,n(x,y)为加性噪声,f′(x,y)为复原后图像,H为h(x,y)的频域变换,即点扩散函数PSF。
1.2 去噪模型
在处理运动模糊图像的复原问题时,由于图像的采集、传输和输出等过程会给图像混入噪声的干扰,并且混入噪声的种类也是不确定的,这种情况增加了噪声处理的复杂度[5]。若对混有噪声的图像不经去噪处理而直接进行复原,效果往往很不理想。假设加入的噪声仅为加性噪声,不考虑乘性噪声,因此,在复原模糊图像前进行去噪处理是图像复原重要的一步,本文对椒盐噪声和高斯噪声进行去除,设置不同参数的去噪后图像与清晰图像进行误差分析,得出最优去噪图像。
本文将清晰无噪声图片,自行加上椒盐噪声和高斯噪声[6],并对其分别进行去噪处理。
1.2.1 椒盐噪声
椒盐噪声被视为图像中黑白相间的亮暗点,中值滤波是去除椒盐噪声的一种有效的方法,其原理是将数字图像中某点的领域中各点的灰度值中值来代替该点的灰度值,邻域一般选为二维窗口,常见的有3*3、5*5、7*7窗口等,我们将无噪声清晰图像进行加噪处理,再利用中值滤波对图像进行去噪,最终对比出所建模型的去噪效果。

图2 原始图像Fig.2 Original image
图3 加椒盐噪声后图像Fig.3 Image with saltand pepper noise

图4 加高斯噪声后图像Fig.4 Image with gauss noise
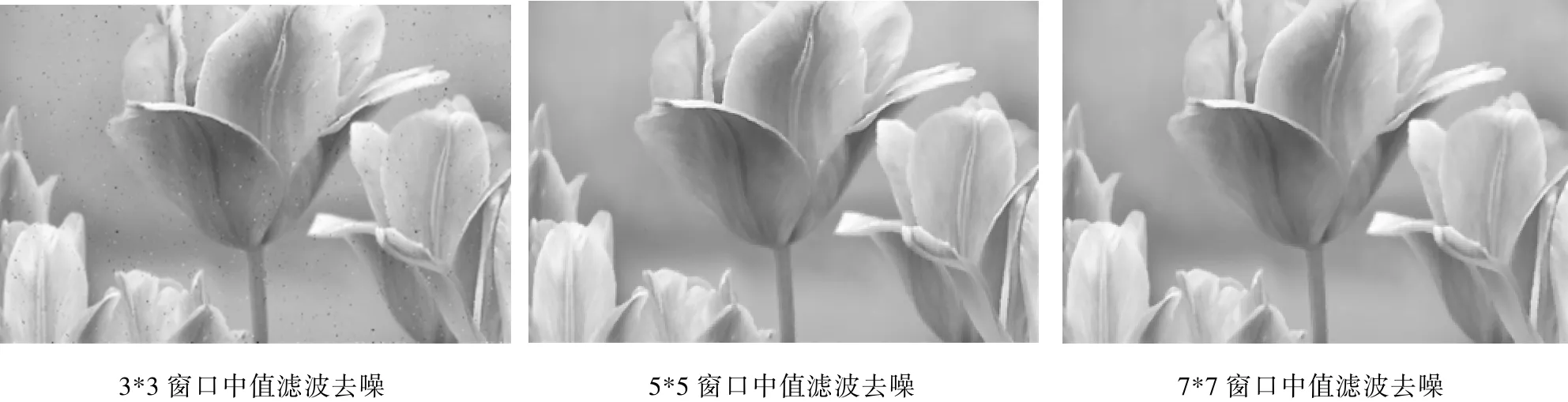
图5 中值滤波去噪还原图Fig.5 Median filter de-noising restoration diagram
普通中值滤波虽然能够降低图像的椒盐噪声,但会造成图像的细节上的模糊,为了减弱中值滤波对图像的影响,我们采用自适应特性的中值滤波[7],去除椒盐噪声效果显著。
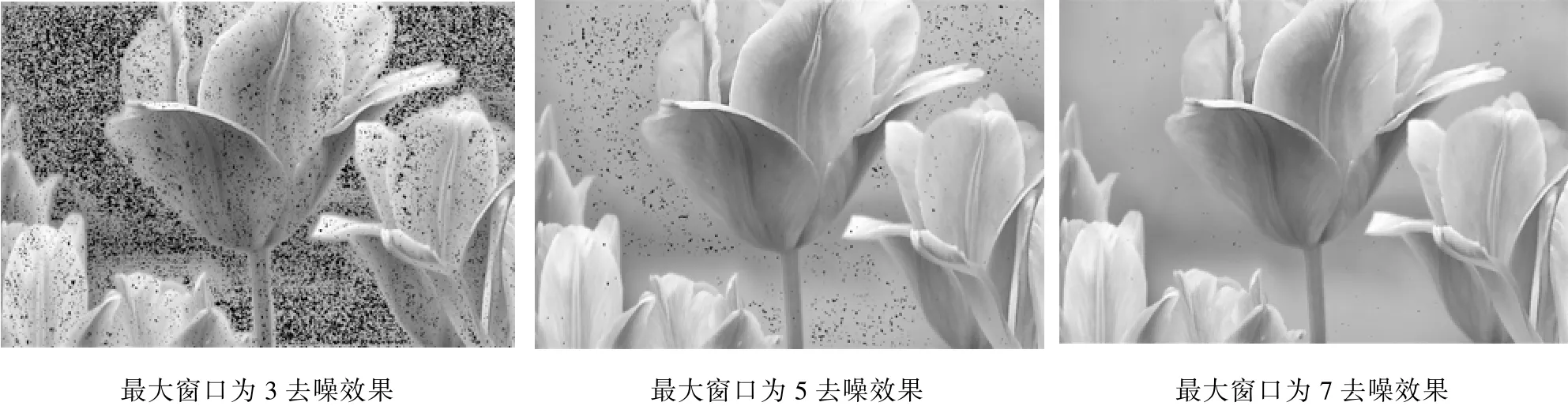
图6 不同去噪方法效果比较Fig.6 Comparison of different denoising methods
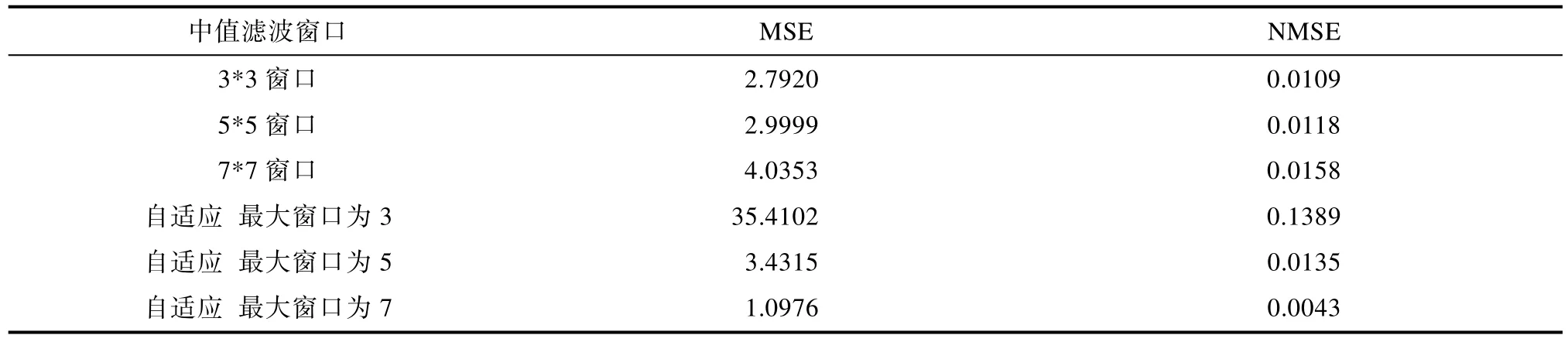
表1 误差比较Tab.1 Error comparison
建立误差检验[8],将去噪后图像与原图进行MSE和NMSE进行比较,发现当自适应中值滤波阈值选择7时去噪效果最好。
1.2.2 高斯噪声
高斯噪声是指概率密度符合正态分布的一类噪声,本文使用邻域平均法来消除高斯噪声,邻域平均法是用某点的邻域内各像素点灰度值的加权来替代该点的灰度值,来抑制高斯噪声的影响。
邻域平均法:

阈值邻域平均法:

S为点(x,y)的一个邻域(不包括该点在内),M为该邻域内包含的像素的总数。
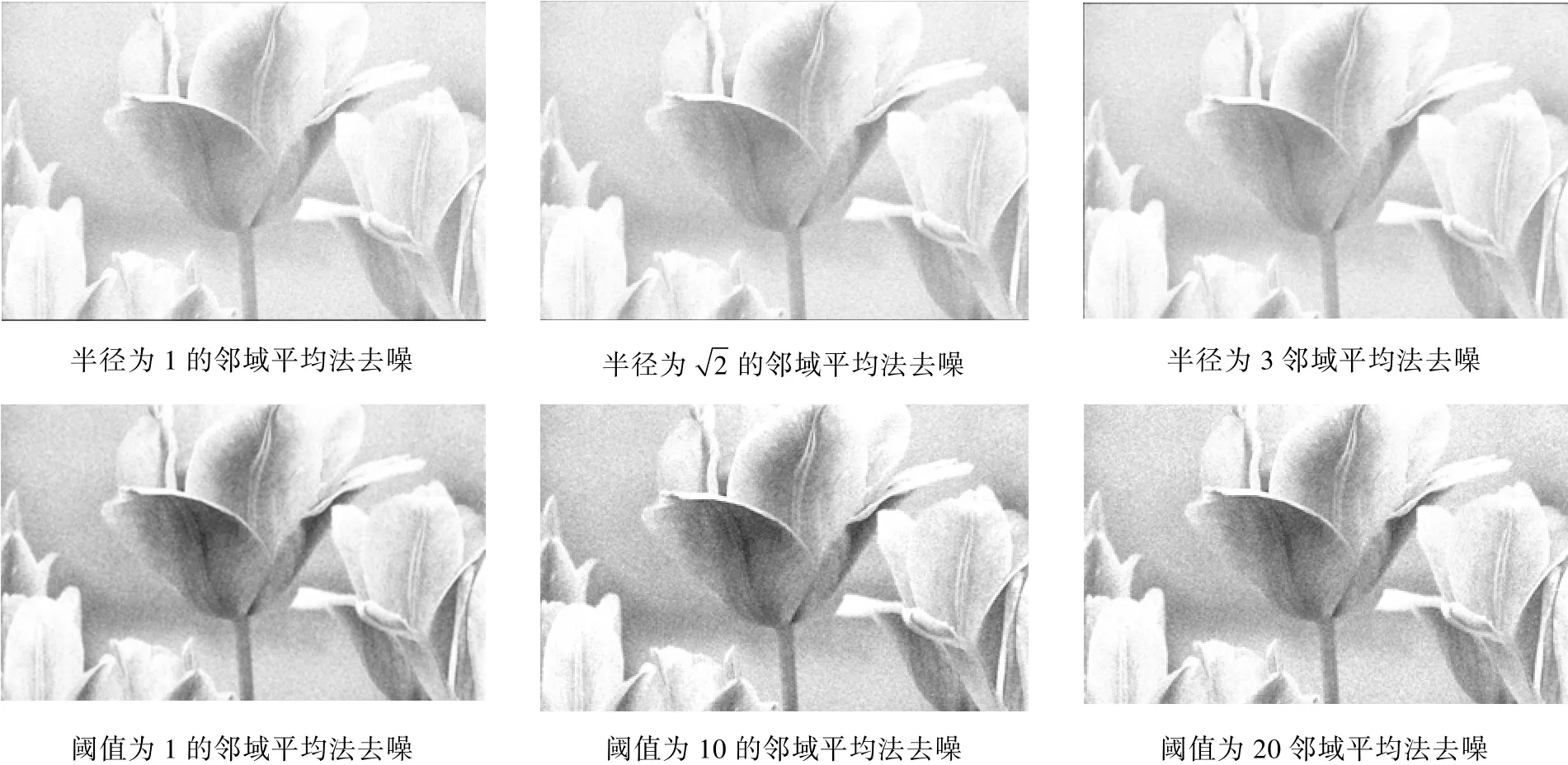
图7 不同去噪方法效果比较Fig.7 Comparison of different denoising methods
从结果上看,邻域平均法能够在一定程度上过滤高斯噪声,但是也会使图像的细节部分发生模糊,邻域的半径越大,包含的像素越多,对高斯噪声的去除效果越好,但同时使图像细节更加模糊[9],因此我们采用含阈值的邻域平均法,求解出窗口内除待测点以外的所有像素点的灰度平均值,若待处理像素点灰度值与这个平均值之差的绝对值大于阈值,则用这个平均值来替代该像素点的灰度值[10],否则,该点的灰度值保持不变。
阈值的选取影响最后图片的处理结果,阈值过大会降低去噪效果,阈值过小会降低去模糊效果,通过对比当阈值为3时,图像处理效果最好。
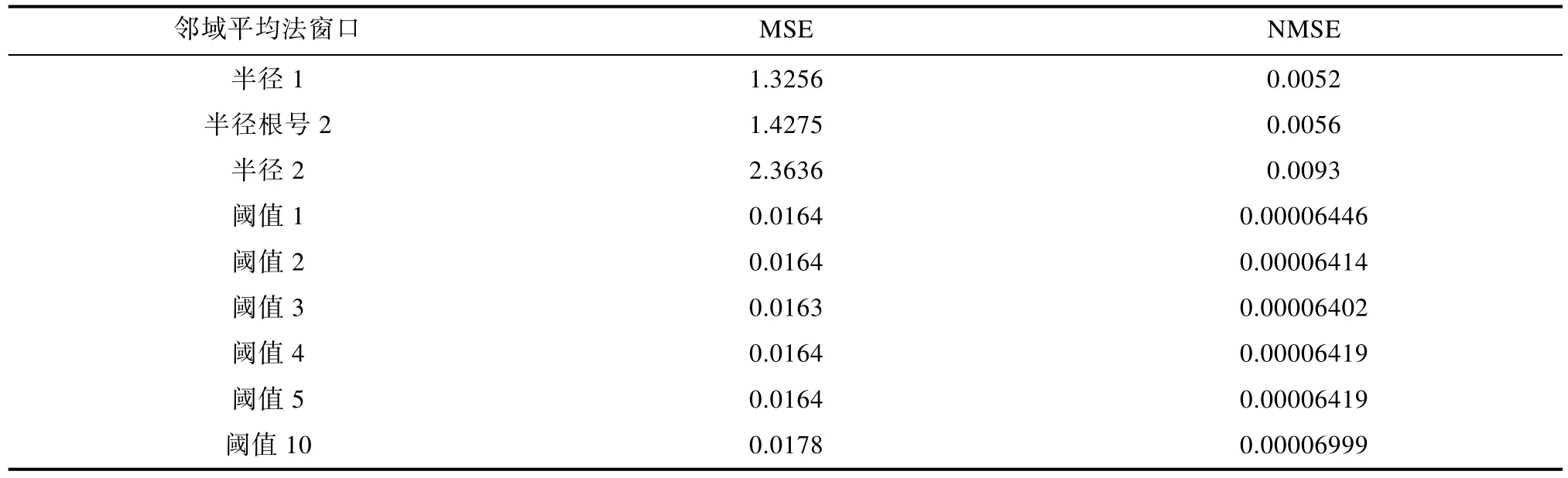
表2 误差比较Tab.2 Error comparison
2 求解图像模糊角度和长度
2.1 运动模糊角度θ 的确定
模糊图像的还原首先需要确定运动模糊角度和长度,运动模糊角度的确定能够将非水平的运动转化为水平方向的匀速直线运动[11],从而降低求解运动模糊长度和图像复原难度。对于匀速直线运动模糊而言,PSF具有零点,导致模糊图像的频谱也出现零点,在相应的频率处,频谱上会出现一系列平行的暗纹,若运动模糊角度为θ,θ则模糊图像频谱图上显示θ+90,方向会出现平行暗纹。因此,我们只需要鉴别出频谱图上暗纹的方向,即可得到模糊运动角度值,下面通过 Sobel边缘检测和 Hough变换来对模糊运动角度进行求解。如图为要求解的运动模糊图像。
基于以上算法利用matlab得到模糊图像边缘检测图和模糊角度频谱图[12],如图9、10所示。

图8 运动模糊图像Fig.8 Motion blurred image

图9 模糊图像边缘检测Fig.9 Edge detection of blurred images

图10 模糊角度Fig.10 Fuzzy angle
2.2 确定运动模糊长度L
对于一幅运动模糊图像,其频谱图上出现的一系列暗线的个数原为图像模糊运动的长度,因此可以通过统计频谱图上暗条纹个数来获得模糊长度L的值。在前面已经估计出了模糊运动角度值,将图像向相反的方向旋转相同角度即将运动模糊转化为水平方向[13]。设PSF的长度为d,在曝光 时间无限长的情况下点扩散函数PSF是对h(x)的截取,如 图11所示。

图11 h(x)截取原理图Fig.11 h(x) interception schematic diagram
其中:

对上式进行水平方向的微分,得到:

对微分后图像作水平方向的自相关运算[14],则求出的曲线正中间峰值左右两边第一个极小值间水平距离的一半即为模糊运动长度。最后利用Matlab求解得到运动模糊角度为140.75°,模糊长度为75。
3 图像复原
根据对比几种算法发现Lucy-Richardson滤波算法还原效果最好,对于没有噪声干扰的理想模糊图像,迭代次数越高图像还原越清晰,迭代次数的增加,解的似然性也会提高,但是会增加计算量。
根据上述所解得模糊图像的长度和角度,建立PSF函数,并利用LR算法进行还原处理,由于迭代次数不同对图像复原影响较大,因此我们利用误差分析评价图像还原的质量。比较不同迭代次数下的MSE和NMSE,发现当迭代次数为80时,其MSE值最小,图像复原效果最好,见表3。

表3 不同迭代次数的误差比较Tab.3 Error comparison of different iterations
根据误差分析表我们利用Matlab得到迭代次数80时的复原图像。如下图所示:

图12 复原图像Fig.12 Restored image
4 结语
在考虑了噪声的影响下,对运动模糊图像的建立退化模型,针对不同的噪声采取不同的处理函数,最终复原效果十分显著。考虑根据文中所建立的模型对运动全面分析,扩展到任何形式的动态模糊图像复原,让方法更具普遍性。
猜你喜欢
吉林大学学报(理学版)(2020年3期)2020-05-29 06:32:16
石家庄铁路职业技术学院学报(2019年3期)2019-10-30 03:26:32
自动化学报(2018年7期)2018-08-20 02:59:04
周口师范学院学报(2016年5期)2016-10-17 06:36:47
航天返回与遥感(2014年4期)2014-07-31 17:47:47
饮食科学(2014年5期)2014-06-18 09:42:17
长江大学学报(自科版)(2014年7期)2014-03-20 13:21:02
电视技术(2014年19期)2014-03-11 15:37:54
华东理工大学学报(自然科学版)(2014年2期)2014-02-27 13:48:48
电子设计工程(2014年18期)2014-02-27 12:00:32
