
四桥臂逆变器解耦与控制研究
2018-12-18 03:04:30,,,
电气开关 2018年3期
,,,
(东北电力大学自动化工程学院,吉林 吉林 132012)
1 引言
由于采用电网连接对偏远村庄或岛屿进行供电需要较高的成本,因此近年来分布式发电系统受到广泛应用。在独立的分布式发电系统中,逆变器可以看做是系统中的一个不间断电源为负载供电[1-3]。通常情况下,用电设备多为三相对称的电动机负载,但在实际的用电过程中,会出现三相或其中一相负载不平衡的现象。当三相负载不平衡运行时,中性点的电位将产生偏移,当偏移严重时会导致单相电压过高,并且会产生零序电流,中性线电流产生的电压会危及人身安全,同时电流不平衡会造成单相设备不能正常用电或过电压导致用电设备损坏。为克服负载出现的不平衡问题,目前多采用三相四线式输出的逆变器,其中三相四桥臂逆变器由于具有保证电压输出质量,克服负载电流不平衡造成的输出电压不对称和畸变问题等突出优点,因此得到广泛的应用[4]。
针对三相四桥臂逆变器的控制策略,目前常见的控制方法主要有空间矢量控制、滞环电流控制、开关点预置控制、中性点控制及正负零序控制等[5-7]。根据控制原理总结,可分为将四桥臂逆变器作为整体进行控制以及第四桥臂独立于前三桥臂进行单独控制[8]。由于整体控制与传统三桥臂逆变器控制相比具有很大不同,不仅无法通用,而且控制过程非常复杂,多见于控制理论的仿真研究中,难以得以实际应用。因此,在实际工况的电力系统控制中,多采用第四桥臂独立控制的逆变器控制法,通过解耦分析得到第四桥臂与前三桥臂之间的关系,进而选择相应的控制方法。文献[9]采用了针对abc三相的各参数量求平均值的解耦方法,进而支撑文献中提出的新型拓扑结构能够达到削弱三相输出中第四桥臂开关动作产生的谐波影响。然而这种解耦方法只针对逆变器的前三相进行分析,没有明确第四桥臂的解耦运算,并且引入开关周期平均算子,计算量过大。文献[10]提出了基于空间矢量坐标下,整个系统在dq0坐标系下的控制模型,将矢量控制的思想与解耦控制研究进行了结合,提升了逆变系统的动态响应性能和带任意负载的能力,同时为四桥臂逆变器的后续研究提供了新的思想和空间。但是在解耦计算中,文献采用的是传统的3阶转换矩阵,不能完全解决由第四桥臂产生的额外自由度的问题。
本文采用了4×4的解耦变换矩阵,通过建立三相四桥臂逆变器的数学模型,得出各桥臂间的数量关系,同时将第四桥臂从与前三桥臂的耦合中分离出来,可以使四桥臂逆变器的调制空间与相应的自由度输出电压空间之间进行直接转换。通过分析,采用电压电流双闭环控制,通过Matlab仿真软件在不同负载情况下进行仿真,并且搭建了离网型磁悬浮微风发电控制系统实验平台,验证三相四桥臂逆变器可以提高分布式发电系统带不平衡负载的能力,实现稳定可靠的控制。
2 四桥臂逆变器数学模型及解耦
图1是应用在分布式发电系统的三相四桥臂逆变器的电路拓扑结构图,其连接的负载是任意的,即可以是不平衡的或非线性的。
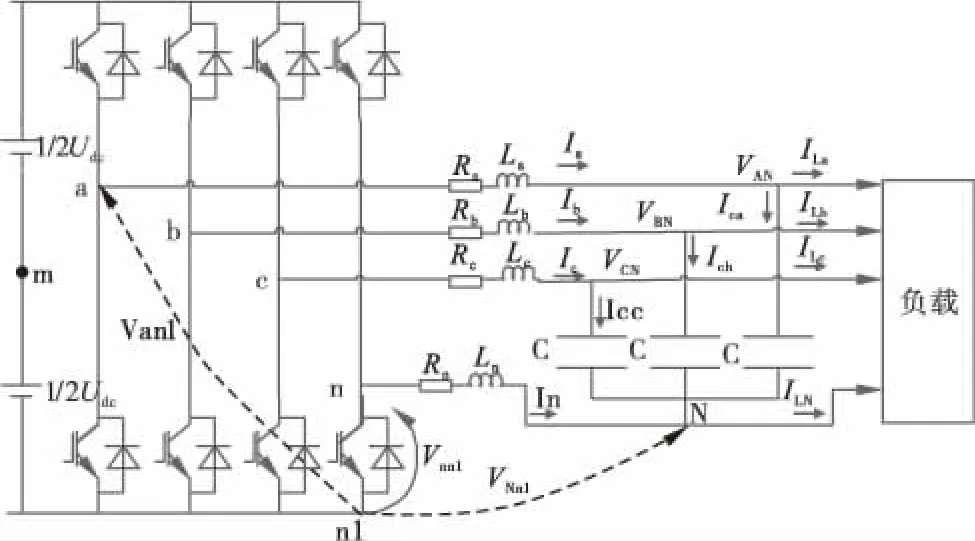
图1 四桥臂逆变器控制结构
对于图1中的结构,通过基尔霍夫定律,可将三相电压方程表示为:
(1)
同理,第四桥臂的电压方程可表示为:
(2)
从图1中还可以得出下列等式:
(3)
Vjn=Vjm-Vnm
(4)
(5)
(6)
其中i=(a,b,c,n),di为调制指数,且取值范围在(-1,1)之间,m为直流母线的中点。
等式(7)和(8)在输出对称电压及不平衡负载的情况下是有效的。
VAN+VBN+VCN=0
(7)
in=-(ia+ib+ic)
(8)
令Li=Ln=L,Ri=Rn=R,联立公式(1)和(8)可以得出在abc坐标下前三桥臂电流和中性电流的表达式,如等式(9)所示:
(9)
通过以上分析,得出四桥臂逆变器在abc坐标系下的电流模型,通过4×4的变换矩阵的作用转换到dq0坐标平面,结果为等式(10):
(10)
转换矩阵Tr的表达式为:
(11)
通过等式(10)得出的三相四桥臂逆变器电流在dq0坐标下的模型,可以看出正负序分量之间的电流存在耦合,且正负序分量间的系数互为相反数,而零序分量与前两阶不存在耦合关系。通过相同的方法可以得出三相电压源的输出电压VAN、VBN、VCN在dq0坐标下的表达公式:
(12)
通过等式(12)可以看出,三相电压源的输出电压在d轴和q轴之间仍然存在耦合关系,而零序分量与d轴和q轴之间不存在耦合,通过d-q轴与0轴之间进行解耦,从而降低了系统的阶数。通过变换矩阵作用可以将第四桥臂从与前三桥臂的耦合中分离出来,进而可以对其进行独立控制,并且能够避免由于自由度增加对三相四桥臂逆变器整体控制造成的三相电压控制复杂等问题。
3 四桥臂逆变器控制方法研究
通过数学建模及推导,实现了零序分量与正、负序分量之间的解耦。在实际控制时负载出现不平衡的情况下,逆变器为达到保证输出电压质量的控制目的,达到稳态后输出电压之中应只包含正序分量。电流中的负序及零序分量经逆变器处理后通过滤波电感传递给负载,从而使通过电容的电流中只存在正序分量。通过逆变器在dq0坐标系下的数学模型方程能够看出,逆变器的正负序分量的数学模型差别仅在的系数上,即正负序分量间可相互转换,也可看做等效。因此,对逆变器的控制重点在于补偿由零序电流引起的压降。
通过三相四桥臂逆变器的拓扑图,设定给定三相桥臂的端电压为:
(13)
当M1(t)=M2(t)=M3(t)时,可以得到ua+ub+uc=0。而对于式(13)中的给定输入,如果能够存在ua、ub、uc、uN使逆变器输出的三相电压对称,而且能够满足三相桥臂端电压的和为零,则通过对第四桥臂电压uN的控制,即可对负载不平衡产生的影响进行完全补偿。
为实现第四桥臂电压能够完全补偿由零序电流引起的压降,因此在稳态的情况下,第四桥臂的电压不仅要补偿零线电感的压降,同时也要对三相线电感的零序电流压降进行补偿[11],即:
(14)
由于in=-(ia+ib+ic),根据对称分量法可知三相零序电流相等,将式(14)代入电压及电流的dq0坐标公式中,通过计算零序分式,可得出第四桥臂电压能够完全补偿由零序电流引起的压降。由于负载不对称,导致相电压在动态输出过程中也会产生零序分量,因此第四桥臂的控制中还应加入对于输出电压中零序分量的控制。针对第四桥臂的控制过程,需要实时引入微分计算,然而在实际工况中,微分计算会放大开关动作引起的扰动,调节过程中易造成系统不稳定,输出电参数质量较差。针对稳态值,微分和积分在相位上近似相差,因此积分在相位上可以等效成负微分,从而可由积分项代替调节参数中的微分项[12]。基于对第四桥臂的解耦计算,以及对各调节参数进行分析,针对第四桥臂的控制策略,为保证系统的动态特性稳定,采用电压外环、电流内环的双闭环控制方法[13],应用在仿真及实验研究之中,从而达到对第四桥臂的独立控制,验证解耦结果的正确性,进而能够进一步论证四桥臂逆变器应用的可行性以及提高系统带不平衡负载能力。
4 仿真及实验研究
4.1 仿真研究
为验证三相四桥臂逆变器能够应用在分布式发电系统中,且能够提高系统的带不平衡负载能力,采用MATLAB软件对逆变系统进行仿真验证。
在不考虑开关死区、电路分布阻抗等因素情况下,首先针对传统三桥臂逆变器进行实验研究,参数选择:直流输入电压为34V,高频三角波频率为16kHz,输出电压频率为50Hz,滤波电容为100pF,滤波电感为6.6mH,调制波为式(13)及(16),d=0.98,k=2。在此基础上,搭建了三桥臂逆变器Simulink框图,得出了负载不平衡情况下逆变系统输出的电压及电流仿真波形对比图,如图2所示。
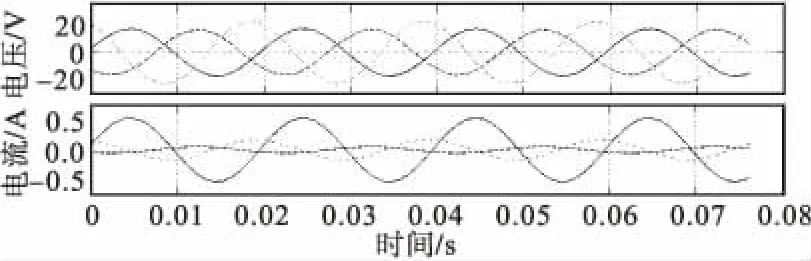
图2 不平衡负载下三桥臂逆变器输出
根据图2能够看出,当控制系统的给定负载不平衡时,输出的三相电压不对称,这会对用电设备产生影响致使其不能正常工作甚至损坏。
针对三桥臂逆变器不能提高系统带不平衡负载的问题,在此基础上,搭建三相四桥臂逆变系统Simulink框图,并在不同负载条件下,进行实验验证。图3为空载情况下,逆变器输出的三相电压及负载电流波形;图4为对称负载情况下逆变器输出的三相电压及负载电流波形,各相负载均为62Ω电阻;图5、6为不对称负载情况下逆变器输出的三相电压及负载电流波形,为验证在任意不对称负载下,逆变器仍能输出稳定的三相电压,图5中A、B相负载为62Ω电阻,C相负载为62Ω电阻串联40mH电感,图6中三相负载分别为100Ω、90Ω、62Ω电阻。
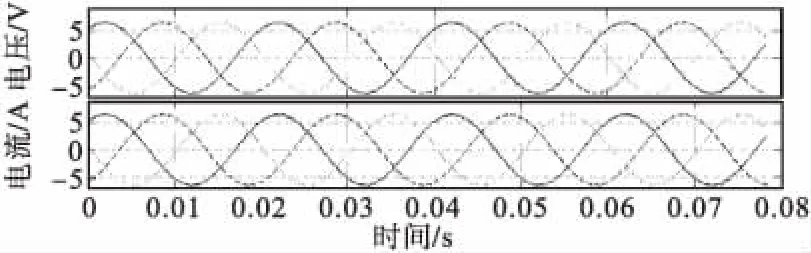
图3 空载情况下输出电压及电流波形

图4 对称负载情况下输出电压及电流波形

图5 不对称感性负载情况下输出电压及电流波形

图6 不对称阻性负载下输出电压及电流波形
通过仿真图形看出,在空载及平衡负载的情况时,三相四桥臂逆变器的仿真模型输出为稳定的三相交流电。而三相负载不平衡时,三相线上电流大小不一,造成零点对地存在电压,负荷端零线对逆变器输出中性点存在电压,从而出现零序电流,即零线回路存在电流,且不平衡越大,对应三相电流不平衡越明显。而输出三相电压仍然保持平衡,说明中性电流对不平衡进行了补偿,第四桥臂电压对零序电流产生的压降进行了完全补偿。由仿真图形的对比能够得出,在负载不平衡时,三相四桥臂逆变系统可以克服不平衡负载产生的影响,输出对称的三相电压,验证了四桥臂逆变器能够提高系统带不平衡负载的能力。
4.2 实验研究
为了验证三相四桥臂逆变器在分布式发电系统中应用的可行性,搭建离网型磁悬浮微风发电控制系统实验台。磁悬浮风力发电机选用深圳泰玛风光能源科技有限公司的CXF-300W,额定功率为300W,额定输出电压为24V,输出频率为50Hz。实验通过磁悬浮微风发电机提供电压,通过整流后,将直流母线电压输入三相四桥臂逆变电路。逆变电路微处理器选用TMS320F28035型DSP,实验参数与仿真参数相同,图7为实验平台图片。

图7 离网型磁悬浮微风发电系统
四桥臂逆变系统输出的三相交流电直接接入高速采集仪,进行数据采集,风机输出的三相交流电的频率随着风速的改变而改变,当风机工作在额定转速时,输出的三相交流电的频率接近50Hz。通过横河高速数据采集仪得出逆变器输出电压波形,如图8所示。
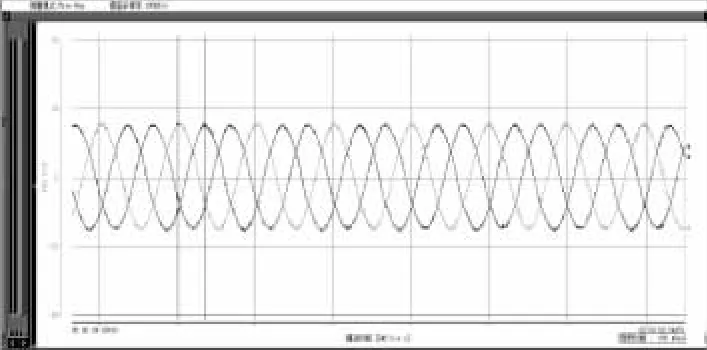
图8 输出电压波形图
图9是在使用微分计算进行控制时,基于不平衡负载情况下输出的电压波形图,通过对比能够看出,在实际控制中,微分计算会放大开关动作引起的扰动,并且对反馈量的任何滤波处理,微分计算都将会对该物理量的相位产生影响,从而造成控制达不到预期的效果。因此,不宜选择微分控制。

图9 微分条件下输出电压波形
整流后的直流电直接加到IGBT的漏极和源极上,经过IGBT输出的三相SPWM波形,输入到正弦滤波器当中滤波,风机输出电压处理后的波形如图10所示,图中相对时间(两纵坐标标尺之间的时间差)为0.01982s,这同时也是实验中一个正弦波周期的时间,0.01982s近似等于0.02s,计算可得输出正弦波的频率为50Hz。
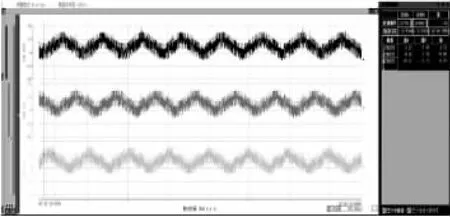
图10 输出电压处理后的波形图
通过硬件系统实验,验证了四桥臂逆变器可以应用在分布式发电系统中,且通过第四桥臂的补偿作用,离网型磁悬浮微风发电控制系统在负载不平衡的情况下,依然能够输出对称的三相电压,进一步证明了四桥臂逆变器能够提高分布式发电系统的带不平衡负载能力且能够提高分布式发电系统的输出电能质量。
5 结论
采用新型解耦变换矩阵实现四桥臂逆变器的数学模型解耦,得出了桥臂间的参数关系,并且实现了四桥臂逆变器的调制空间与相应的自由度输出电压空间的直接转换。结合第四桥臂独立控制的双闭环控制方法,通过仿真结果验证了三相四桥臂逆变系统可以克服不平衡负载产生的影响,输出对称的三相电压。通过离网型磁悬浮微风发电控制系统实验平台,验证了四桥臂逆变器在分布式发电控制系统中应用可行,同时可以提高分布式发电系统的带不平衡负载能力。
猜你喜欢
电工技术学报(2023年16期)2023-08-30 02:44:26
工友(2023年7期)2023-07-21 06:02:38
中国实用神经疾病杂志(2018年9期)2018-05-25 01:01:08
设备管理与维修(2016年7期)2016-04-23 06:51:36
通信电源技术(2016年5期)2016-03-22 01:10:13
电气传动(2015年4期)2015-07-11 06:10:56
中国医药导报(2015年20期)2015-01-11 03:01:27
电测与仪表(2014年19期)2014-04-04 12:06:16
河南科技(2014年18期)2014-02-27 14:14:58
电力工程技术(2013年6期)2013-03-11 16:51:10
