六自由度工业机器人的模态仿真与实验
2018-12-18 01:15李世杰马建龙郑培飞
机械设计与制造 2018年12期
李世杰,李 飞,马建龙,郑培飞
(河北工业大学 机械工程学院,天津 300130)
1 引言
随着“中国制造2025”的提出与推进,工业机器人的普及率也越来越高。我国工业机器人,因起步较晚,其水平落后其它发达国家很多,究其原因,主要是在工艺设计及应用上的经验不足。目前,工业机器人普遍运用在高精密、高强度的产品制造行业,要保证机器人的可靠性和稳定性,机器人须具有很好的动态性能[1]。工业机器人动态特性的评估和测试,是一件复杂的工作。针对工业上使用广泛的六自由度关节工业机器人,利用ANSYS Workbench软件,对其在工况姿态下进行有限元建模与模态分析,获得其固有频率及阵型,同时利用模态分析实验,来确保该方法的可靠性,同时获得工业机器人相关阻尼参数。为改善工业机器人的机械性能及传统设计工艺打下基础[2]。
2 机器人的模态仿真
2.1 机器人有限元模型的建立
研究的对象选用ABBIRB6700-150(规格:称重能力150kg,工作范围3.20m)六自由度关节型机器人,其模型由Solidworks建模软件建立,模型及结构,如图1所示。图中标示了该机器人的基本外形、功能结构、关节的位置及数量。该机器人的主要结构组成包括基座、腰、大臂、肩、小臂和腕部等。
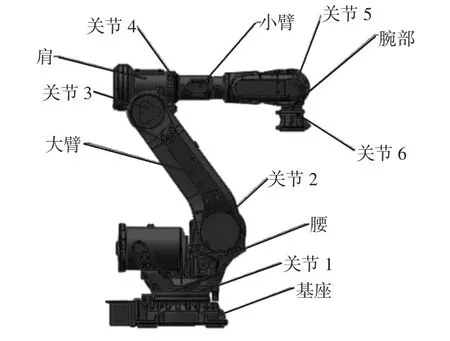
图1 机器人结构Fig.1 Structure of the Robot
在三维模型建立完成后,通过软件之间的数据交换接口将模型导入ANSYSWorkbench中。由于三维模型实体结构复杂,包含的零件、连接方式较多,为了降低软件对其分析的任务量,同时防止不规则的实体模型在网格划分时变得异常复杂,而引起仿真精度降低,其分析对象须进行适当的简化或结构等效化处理[3]。
模型的简化建立在保证结构质量以及质量分布基础上,具体的简化处理方式:(1)对模型结构性能影响不大的工艺孔、倒角及圆角等结构进行简化处理;(2)对电机、液压缸等器件结构进行实体等配重简化处理;(3)对减速机、键连接等传动机构进行froma newpart处理等[2-3]。将简化后的等效模型导入ANSYSWorkbench软件后,如图2所示。

图2 机器人等效简化模型Fig.2 Equivalent Simplified Model of the Robot
2.2 模态仿真前处理
模态分析的前处理工作包括模型部件的材料特性设定、模型的网格划分、定义接触面约束、测试环境设定(包含重力、外力的加载)以及分析要求的设定等。
机械臂各结构的材料设置为结构钢,密度为7850kg/m3,伯松比0.3,杨氏模量200GPa,关节的定义主要通过面约束来实现,考虑到机械人的结构特点和分析的可靠性,选用bonded约束定义机械人各关节的接触特性。在网格划分方面,采用四面体网格划分,并使用patch conforming算法[3]。最终网格划分节点为69101,单元数为38610,网格划分,如图3所示。
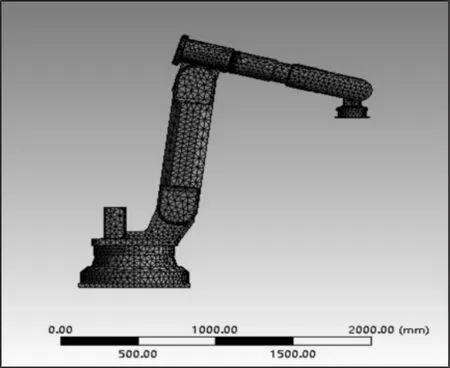
图3 机器人有限元模型Fig.3 Finite Element Model of the Robot
仿真采用结构静力学分析与模态分析串联的方法,利用结构静力学的边界条件作为模态分析的初始条件,以确保模态分析的结果,更富有实际性;添加接触面约束,同时将底座底面设为固定支撑(fixed support),对机械臂施加重力加载,同时在机器人六轴法兰处,施加500N竖直向下的载荷力,以模拟机器人安装工具及工作对象的实际工况[2-4]。加载模拟示意简图及结构静力学仿真,如图4所示。

图4 机器人静力加载与仿真Fig.4 Static Loading and Simulation of Robot
考虑到工业机器人为高自由度机构,其发生共振的频率主要处于低频范围,故仿真选取机器人的前5阶模态,频率范围选择对机器人性能影响较为明显的(10~200)Hz,能够满足对其振动特性的研究要求。工业机器人的前五阶固有频率以及振型,如表1所示。其对应的振型情况,如图5所示。

表1 工业机器人仿真前5阶固有频率Tab.1 First Five Natural Frequencies of Industrial Robot

图5 工业机器人前5阶固有频率振型图Fig.5 FIG Modes of First Five Natural Frequencies of Industrial Robot
由仿真数据结果可以得知,工业机器人的前5阶固有频率分布于(10~200)Hz之间,而最低频共振发生在5关节处,这与5关节刚度过小有关,易引起低频振动;其次是绕2关节及大臂的前后摆动,因功能需要,大臂结构设计相对较长,且多采用壳体设计,所受力矩较大,导致大臂刚度下降。此问题可通过减少大臂壳体工艺孔、增加内部肋板、增大壳体厚度来解决。其余振动变形皆发生在4关节及小臂部位,4关节因其力臂小,且需避免与6关节出现奇点问题,其变形很难得到有效的改善;小臂与大臂存在类似的问题,只因其承受应力较小,相对影响并不明显,但其问题依旧需要重视,可通过增厚薄壁或改进材料来提高小臂刚度,改善振动问题。总体上,此次仿真反应出了工业机器人在工艺设计上的典型问题。
3 机器人的模态分析实验
由于对机器人的关节和工艺结构的简化,为确保上述仿真的可靠性,且理论模型计算很难得到模态阻尼,所以工业机器人进行模态分析实验是必要的。
3.1 实验方案
机器人的模态分析实验在ABBIRB6700-150(规格:称重能力150kg,工作范围3.20m)上进行,在验证上述分析方法在结构复杂的工业机器人上可行性的同时,也为该方法的改进提供帮助。模态分析实验的激振、拾振以及信号处理方案,如图6所示。激振及拾振位置皆选在机器人6轴轴端X方向,以更有效测试工业机器人真正的工作模态性能参数[5-6]。

图6 模态分析实验原理图Fig.6 Schematic of the Experimental Modal Analysis
该测试中激振源采用冲击力锤(联能LC-01A型,最大冲击力2kN,灵敏度4PC/N,选择橡胶质锤帽,利于低频测量),由人工击打机器人6轴轴端,以激发信号,拾振加速度传感器选用三坐标加速度传感器(联能CA-YD-3116型,频率响应(1~4000)Hz,灵敏度20PC/g),将数据采集域设置为(1~1000)Hz,数据通过数据采集器进入CUTPRO分析系统[7]。实验部分设备及仪器,如图7所示。

图7 实验现场及设备情况Fig.7 Sites and Equipments of the Experiment
3.2 实验结果
实验完成后,将采集到的数据进行曲线拟合,以简化参数提取过程。数据得到频响函数的实部与虚部,如图8所示。在虚频图中,所有峰值均出同相位。利用CUTPRO系统完成模态参数的辩识,得到频率及阻尼参数,选取前五阶作为研究对象,得到工业机器人的相关模态参数结果,如表2所示。
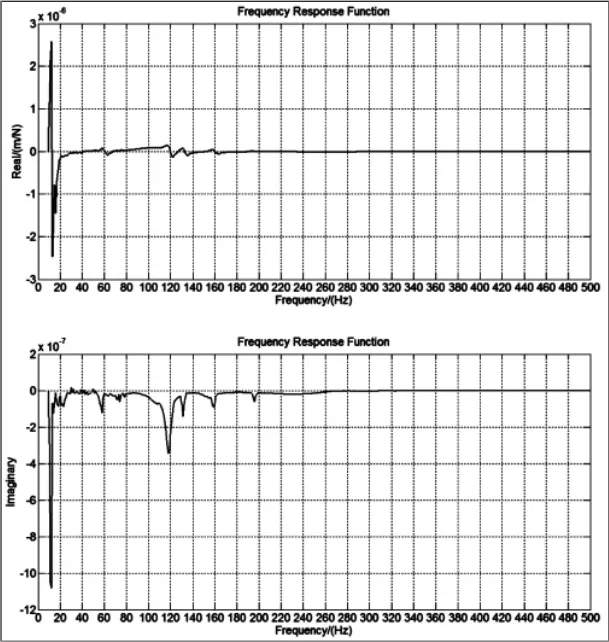
图8 频响函数的实部与虚部Fig.8 Real and Imaginary of Frequency Response Function

表2 工业机器人实验前5阶模态参数Tab.2 First Five Modal Parameters of Industrial Robot
4 结论
(1)利用ANSYSWorkbench仿真软件,对工业机器人进行模态分析,得出其在工况下的模态特性,并与模态实验结果相对比,除1阶的结果误差为18.93%之外其它结果误差皆控制在10%以内;误差偏大的原因包括模型误差、参数误差及实验测量误差等。由于没有相关案例的参考,该仿真方法在结构简化和仿真参数的选择上存在一些不足,工业机器人为高自由度机械机构,相应的结构简化,必将引起模态分析结果的较大变动;关于实验测量误差问题,该实验设备的选择选用精度相对较高的仪器,但测量环境并不能达到绝对理想,如传感器的安装、室温、测量时的人为操作不规范等。(2)基于ANSYSWorkbench仿真方法,能够反应工业机器人在发生共振时的振型、共振部位等问题,这也是模拟分析优于传统实验的因素之一。为确保该振情况的可靠性,下步工作将从工业机器人多点式模态实验所展开。(3)模态仿真及模态分析实验,共同反应出了工业机器人的固有频率偏低问题,其问题出现在关节处、大臂及小臂处,可以通过改善机器人整体结构,改良材料性能,提高刚度,来达到提高固有频率,缓解关节和肩臂的受力的效果。本次测得数据为其优化改良提供可靠参考。(4)本次工业机器人模态情况的测取,采用的是仿真分析为前提,实验分析为保证和补充的方式。仿真分析可以充分节省资源与时间,同时在机器人设计之初便可入手,改善传统设计工艺;因为机器人模态仿真的可参考案例较少,要确保仿真参数设定的可靠性,必须进行相对应的实验,以更好的指导有限元理论模型的修正,使理论模型更趋完善与合理。该方法将为传统工业机器人优化设计及性能改善的工艺改进提供便利,为模拟分析取代传统实验提供重要参考,同时在解决工业机器人模态特性测取困难的问题上打下基础。
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
昆明医科大学学报(2022年3期)2022-04-19
化工机械(2022年1期)2022-03-21
环境技术(2021年4期)2021-09-11
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
载人航天(2016年4期)2016-12-01
振动与冲击(2014年21期)2014-09-18
综合智慧能源(2014年1期)2014-09-10
中国神经再生研究(英文版)(2014年23期)2014-06-01
中国工程机械学报(2014年3期)2014-05-25