基于变论域模糊PID控制和KNX技术的LED照明系统
2018-12-18 01:10吴起行
浙江科技学院学报 2018年6期
吴起行,王 凯
(1.浙江机电职业技术学院 电气电子技术系,杭州 310053;2.浙江中控自动化仪表有限公司,杭州 310053)
节能环保和智能控制是城市智慧照明的发展趋势,近年来此领域研究取得了极大进展。张立萍等[1]将蚁群控制策略应用于大规模LED灯通信组网的研究,既提高了城市照明的节能效率,又降低了大型系统的管控成本,形成良好的社会效应。林海军等[2]提出一种基于约束条件的神经网络方法用于LED灯的光照强度控制,其模型误差小,泛化能力强,但需要收集大量数据对模型进行反复训练,不够便捷。模糊自适应PID控制因具有较高控制精度,且不需要训练过程,因而逐渐被广泛应用,如陈佳洲等[3]基于该策略研发了LED舞台灯自适应调节系统,调光响应快,稳定性高。但模糊控制的本质是一种非线性控制,无法彻底消除稳态误差,且控制时只对PID参数进行间歇性调整,因此还会出现控制死区。为解决这一难题,李洪兴[4]提出了变论域自适应模糊控制理论,根据误差大小调变论域范围,确保在误差零点附近的规则足够多,从而消除控制死区。该理论被提出后,先后被应用于电机控制[5-6]、光伏发电系统MPPT控制[7]、机器人控制[8-9]等精密控制领域,在控制复杂程度没有显著增加的前提下,大大提高了系统控制精度。
KNX总线协议先后被美国、中国等批准为国家标准[10],夏长凤[11]应用KNX技术设计一套智能家居控制系统,对灯光、窗帘、安防等进行综合组网,信号传输较无线通信技术更加稳定,控制便捷。卜军[12]基于KNX现场总线成功研发图书馆照明智能控制系统,验证了KNX技术在楼宇集中监控、照明节能控制上的显著优势。本研究结合变论域模糊PID控制策略和KNX技术的优点,设计一种变论域模糊PID调光控制器用于恒照度控制,以KNX技术实现照度数据采集和系统通信控制。
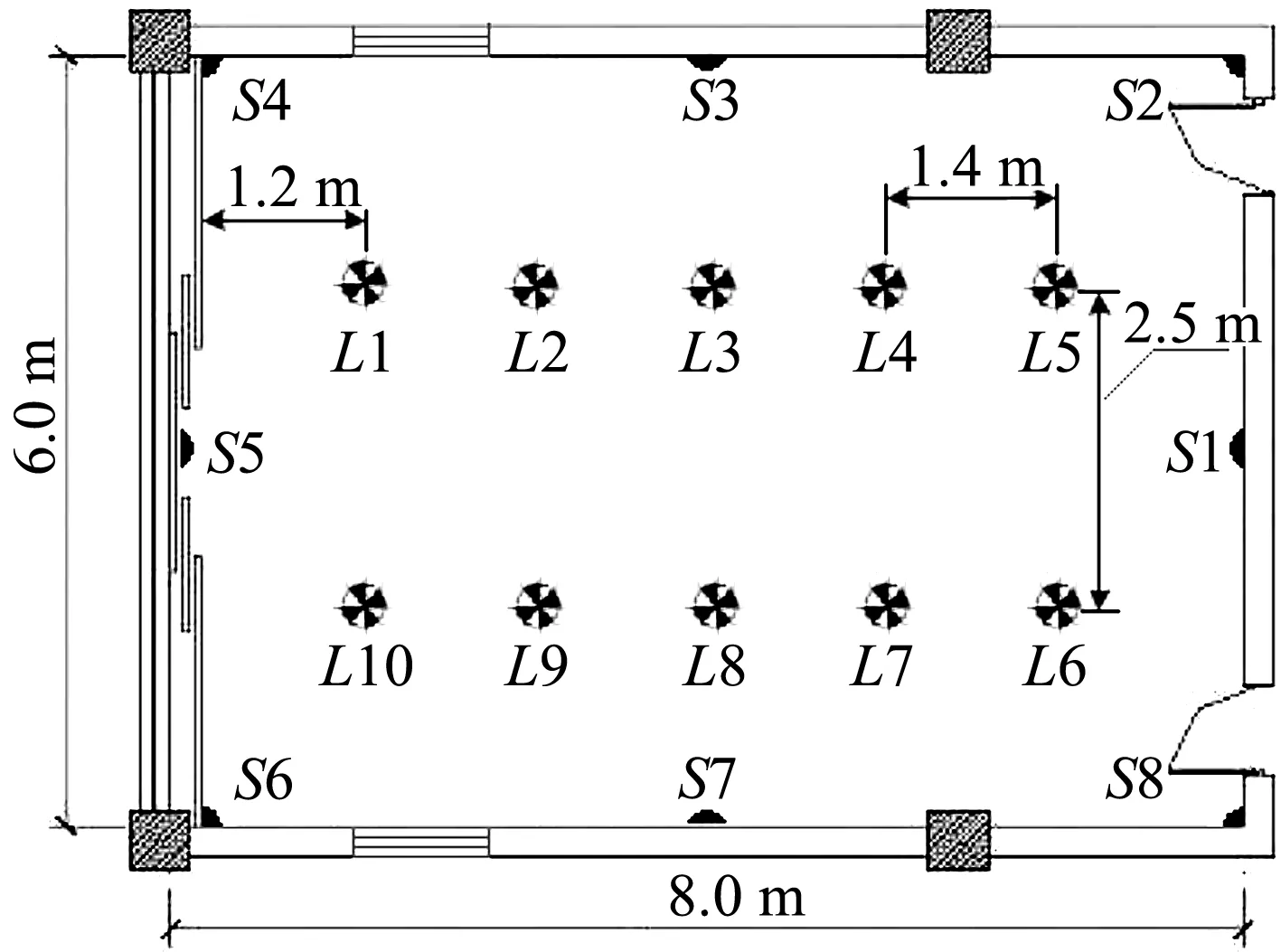
图1 系统平面布局Fig.1 System layout plan
1 系统布局设计
系统应用于面积6 m×8 m,层高3.8 m的会议室,10路LED灯(L1,L2,…,L10)如图1所示,照明监控系统预置照度设定值300 lx。照度传感器在会议室四壁的中线及四角处离地0.75 m位置各装1只(S1,S2,…,S8),并将室内照度数据通过KNX总线发送到主控器。
2 LED驱动器硬件设计
LED驱动器硬件结构整体设计如图2所示,LED驱动器设计指标见表1。
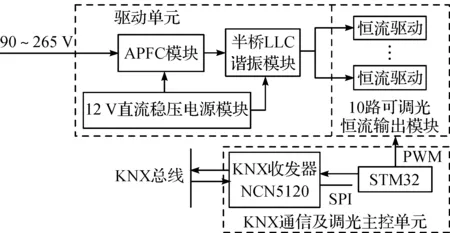
图2 LED驱动单元结构Fig.2 Structure of LED drive unit
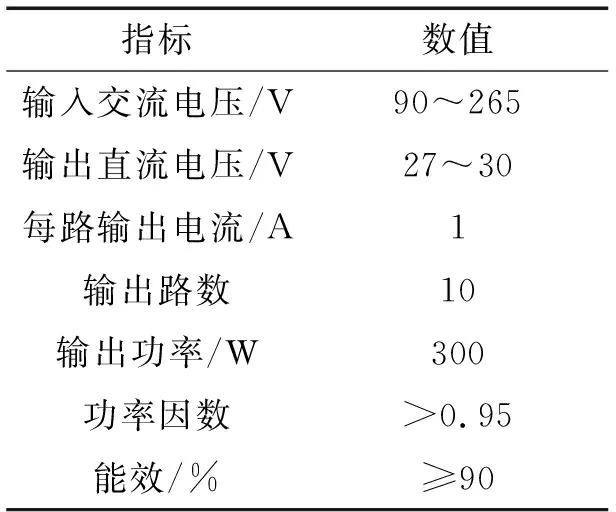
指标数值输入交流电压/V90~265输出直流电压/V27~30每路输出电流/A1输出路数10输出功率/W300功率因数>0.95能效/%≥90
2.1 AC/DC变换单元
AC/DC变换单元由boost型APFC模组、半桥LLC谐振模组及10路可调光恒流输出模组构成。
2.1.1 boost型APFC模组
提高设备功率因数有助于减小输电线能量损耗,改善设备的电流品质。APFC技术谐波抑制效果好,可为设备提供宽输入电压范围及宽工作频带。现设计工作在CCM模式的boost型APFC模组如图3所示,控制芯片PFS7628H是PI公司最新款boost型APFC电路单芯片解决方案,供电电压为直流12 V,最大持续输出功率350 W,功率因数大于0.95,额定输入电压下10 %至100 %负载间能效均超95%[13]。

图3 boost型APFC模组Fig.3 boost type APFC module
2.1.2 半桥LLC谐振模组
半桥LLC谐振模组如图4所示,以软开关方式降压至直流40 V给恒流模组。半桥LLC谐振模组的控制芯片选用PI公司的LCS705HG,内置LLC控制器及2个功率MOSFET及驱动,由12 V直流稳压电源供电,最大输出功率350 W[14]。半桥LLC谐振模组的原副边电路间通过光耦LTV817A作反馈。
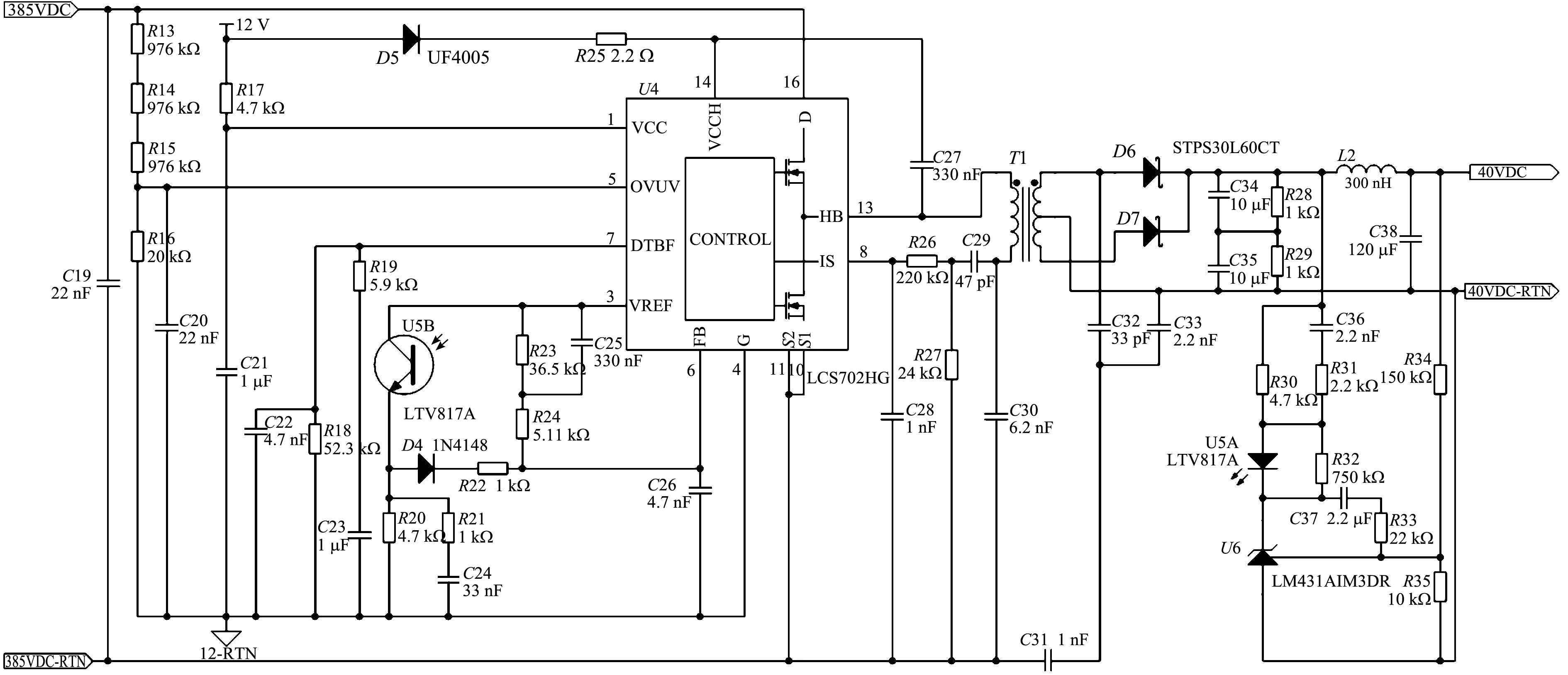
图4 半桥LLC谐振模组Fig.4 Half bridge LLC resonant module

采用FHA模型[15]设计LLC谐振槽参数。
1)前级APFC模组输入到半桥LLC谐振模组的电压Ui_LLC最小值取300 V,最大值取420 V,半桥LLC谐振模组输出电压Uo_LLC取40 V,输出功率300 W,能效为0.96。
3)谐振频率fr取250 kHz,LCS705HG引脚DT/BF外分压器电阻设计为6.8 kΩ和62 kΩ(即脉冲模式阈值设为2),此时该引脚灌电流约为325 μA,查询LCS705HG数据表得:此时芯片理想最大工作频率被设为800 kHz,半桥死区时间TD=270 000/800=338 ns,半桥MOSFET寄生电容Coss取150 pF。
4)使用第一种求法,当输入电压最小,输出满载时,求得最大品质因数Qmax1(Mmax和Mmin为直流电压增益上下限值):
得到两种求法中的较小值,乘以0.95作为品质因数Q估算值。
将以上参数带入FHA模型得到的结果见表2。
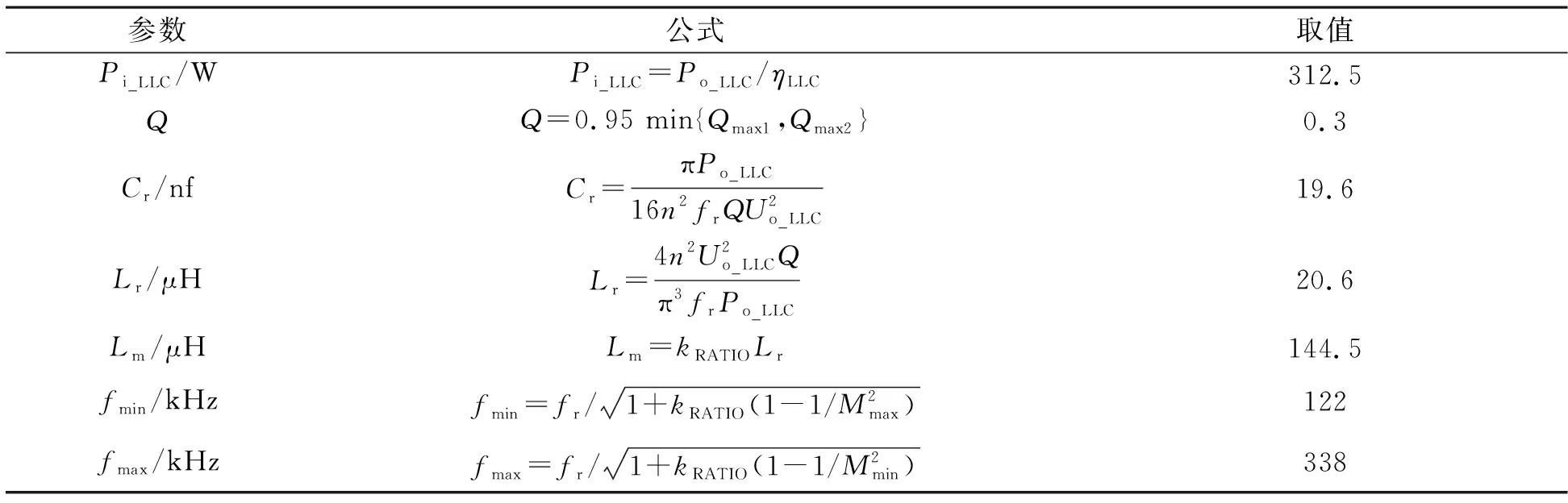
表2 半桥LLC谐振模组设计参数Table 2 Parameters of half bridge LLC resonant module
2.1.3 12 V直流稳压电源模组
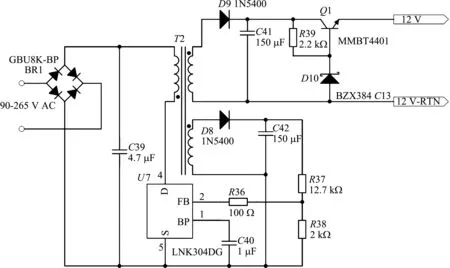
图5 12 V直流稳压电源模组Fig.5 12 V DC regulated power supply module
基于离线式开关芯片LNK302DG的12 V直流稳压电源电路如图5所示,变压器匝比5∶1∶1,芯片反馈引脚FB从2号副绕组采样,隔离主电路与12 V稳压电源。
2.1.4 PWM调光的恒流输出模组
PWM调光的恒流输出模组如图6所示,共10路,各路都选用TI公司的Buck型芯片TPS92515HV驱动LED,其输入直流电压范围5.5~65 V,最大输出平均电流2 A,满足设计要求[16]。模组采用PWM调光方式,调光精度高、范围宽,无LED色偏。PWM信号由STM32经高速光耦6N137隔离,提供给TPS92515HV,进行模糊调光控制。TPS92515HV的VCC引脚可输出稳定的直流5 V,为6N137供电。
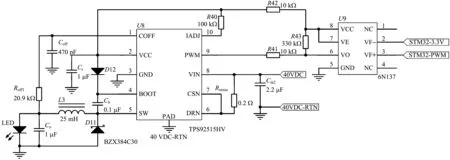
图6 可调光恒流输出模组Fig.6 Adjustable optical constant current output module
2.2 KNX通信单元
KNX通信介质使用双绞线TP1,总线收发器选用NCN5120芯片,通信控制器选用STM32F103C8T6。NCN5120芯片是OS公司的KNX收发器芯片,由KNX总线供电,内置DC/DC转换器提供3.3 V固定输出电压[17]。STM32F103C8T6(以下简称STM32)是一款基于ARM Cortex-M3内核的32位MCU,其供电电压2~3.6 V[18]。如图7所示,NCN5120与STM32间以SPI方式通信,NCN5120作为SPI主机,STM32作为SPI从机。NCN5120为STM32提供3.3 V供电电压及16 MHz同步时钟信号。
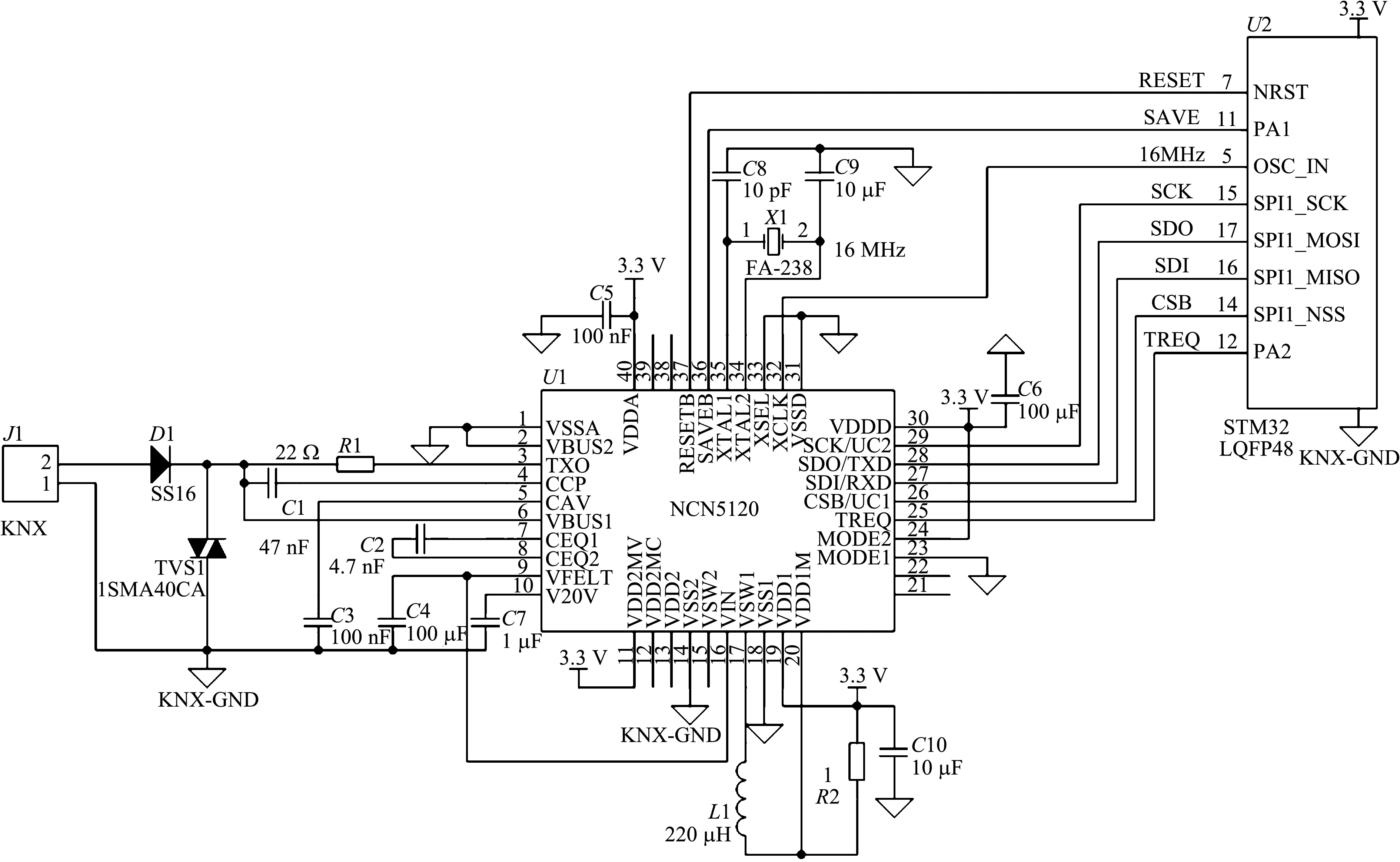
图7 KNX通信单元电路图Fig.7 KNX communication unit circuit diagram
3 带KNX通信的照度传感器设计
带KNX通信的照度传感器如图8所示,由KNX收发器NCN5120、通信控制器STM8S105K4和照度传感器芯片BH1750FVI组成。STM8S105K4(以下简称STM8)属于8位MCU,其RAM为2 KB,flash存储器为16 KB,供电电压2.95~5.5 V[19]。NCN5120与STM8间以SPI通信。BH1750FVI内部集成16位ADC,直接将光照度转变为16位数字信号,由STM8用I2C通信来驱动,选择H-resolution Mode方式工作,分辨率为1 lx。传感器3.3 V电源由KNX总线通过NCN5120提供。
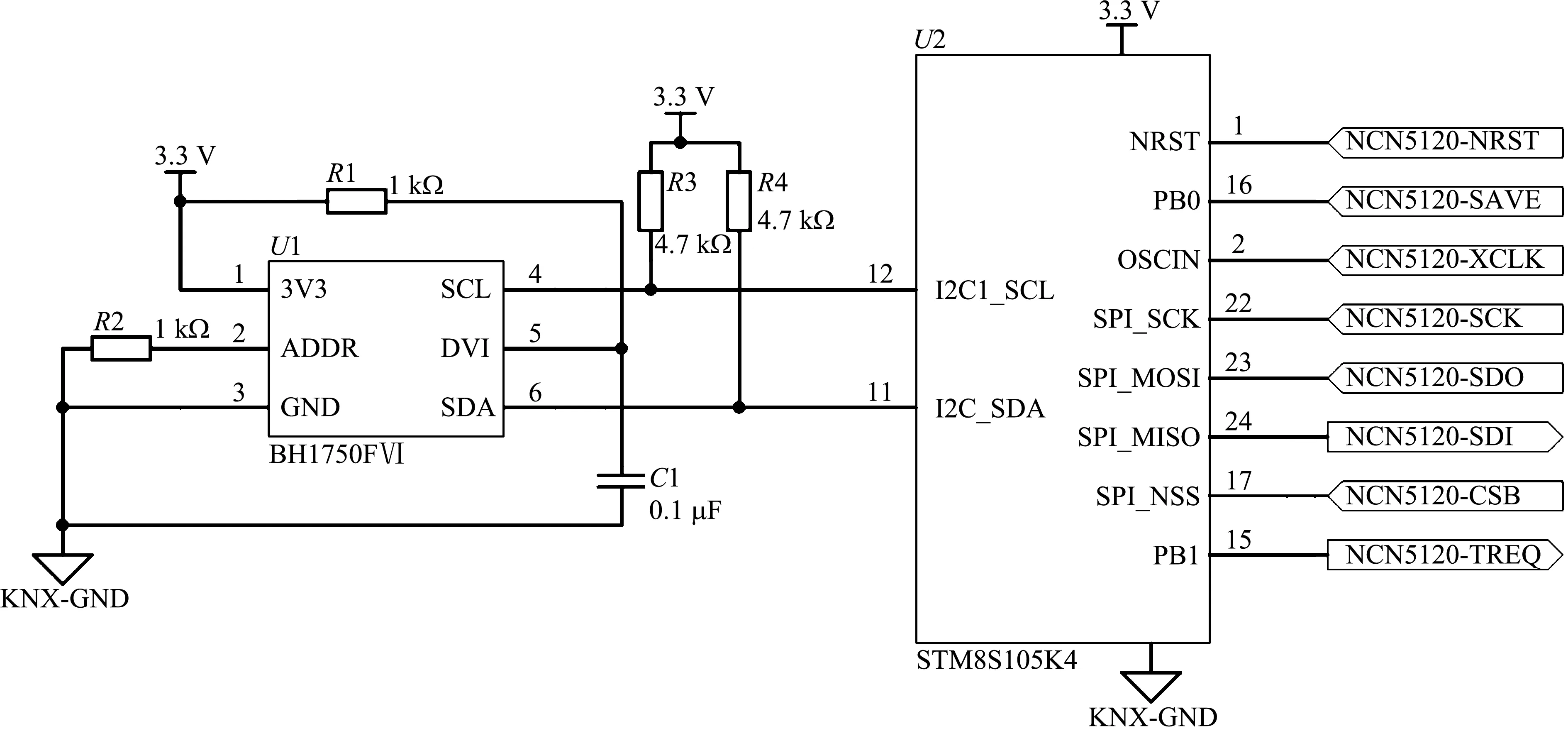
图8 带KNX通信的照度传感器Fig.8 Illuminance sensor with KNX communication
4 系统软件设计
系统的通信配置与照度监控由PC上位机使用ETS3软件完成,使用EITT3软件[20]完成在线调控。LED驱动器及照度传感器使用Keil C语言环境编程,实现KNX通信功能以及变论域PID恒照度控制功能。照度传感器每隔5 s自动给LED驱动器发送1次照度采样数据。
4.1 KNX协议栈设计
KNX协议栈程序的功能是实现与KNX总线间的通信(图9),分为物理层、数据链路层、网络层、传输层和应用层5个层级。其中,应用层通信对象包括10个开关通信对象,10个远程照度设置通信对象,8个照度数据采集通信对象。
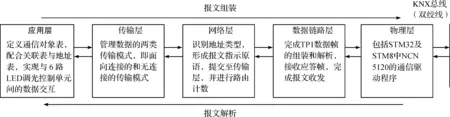
图9 KNX报文的解析与装配Fig.9 Analysis and assembly of KNX message
4.2 变论域PID恒照度调光控制器设计
经典PID控制理论在数字式控制系统中应用时,需进行离散化,设计为增量式PID控制,以节省计算资源,减小超调量,其中Δu(n)为当前控制器输出量,l(n)为当前误差,l(n-1)为上一次采样时误差,l(n-2)为上两次采样时误差。
Δu(n)=kp[l(n)-l(n-1)]+kil(n)+kd[l(n)-2l(n-1)+l(n-2)]
变论域PID控制策略如图10所示,以经典PID控制为基础,对比例、积分、微分3个控制参数(kp、ki、kd)进行自适应调整:
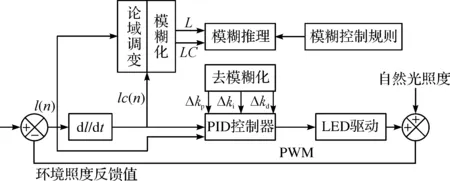
图10 变论域PID控制器Fig.10 Variable-universe fuzzy PID controllor
设计变论域PID控制的输入量为照度误差l及误差变化率lc,其模糊化后得到模糊变量L与LC,输出模糊变量U=ΔKp,i,d,去模糊化后得到精确输出量u包含kp、ki、kd的自适应调整值Δkp,Δki和Δkd,输入与输出量论域范围见表3,划为{NL,NM,NS,ZE,PS,PM,PL}7个子集,输入输出量的隶属函数都为等腰三角形函数。

表3 输入与输出量论域范围Table 3 Universe range of input and output
变论域PID控制原理如图11所示,输入与输出量基本论域及模糊化后的初始模糊论域范围见表3。可以随误差量变小实时收缩模糊论域范围,相对增加误差零点附近控制规则数目,以消除控制死区,增加控制精度。设计比例型伸缩因子α(l)如下,其中l为照度误差,E取300,τ取0.8。
α(l)=(l/E)τ。

图11 输入输出量隶属函数Fig.11 Membership function of the input and output
模糊控制规则,即如果l=Li且lc=LCj,则u=Uij,其中模糊量Li,LCj,Uij⊂{NL,NM,NS,ZE,PS,PM,PL},同一组(l,lc)可隶属于不同的(Li,LCj)组合,对应到不同的输出模糊量Uij。设定如下(表4~6):
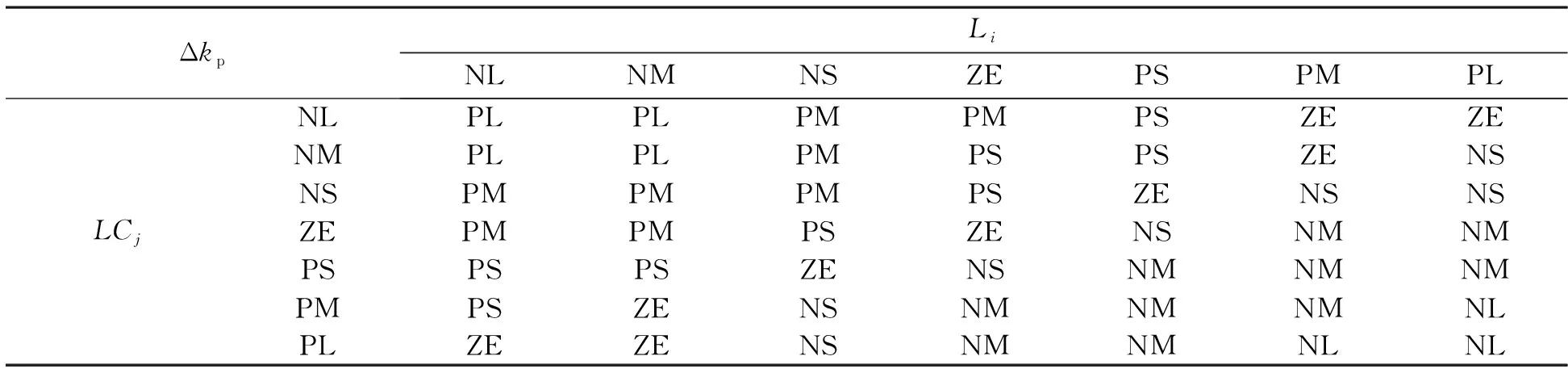
表4 Δkp模糊控制规则Table 4 Fuzzy control rules of Δkp
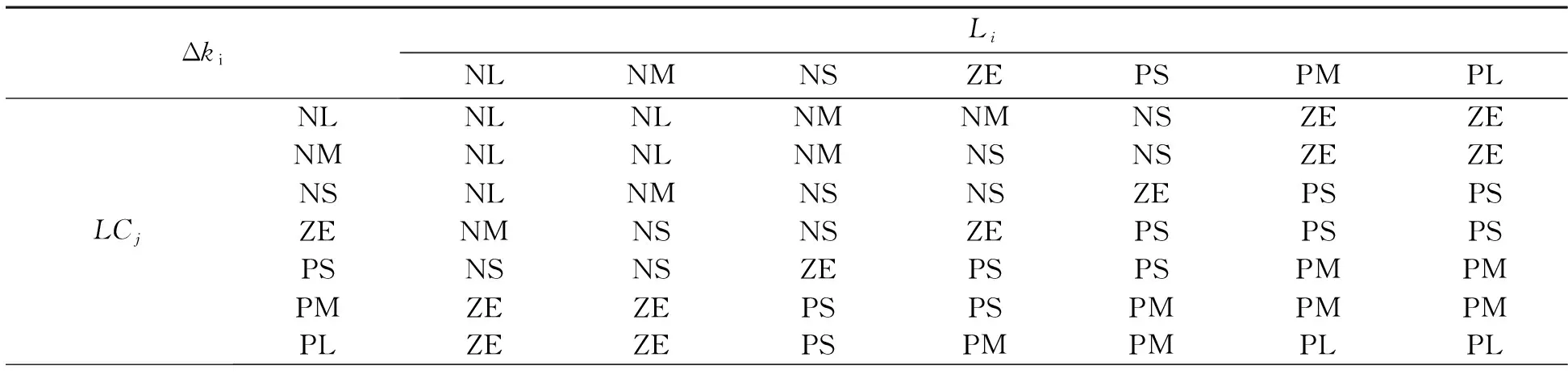
表5 Δki模糊控制规则Table 5 Fuzzy control rules of Δki
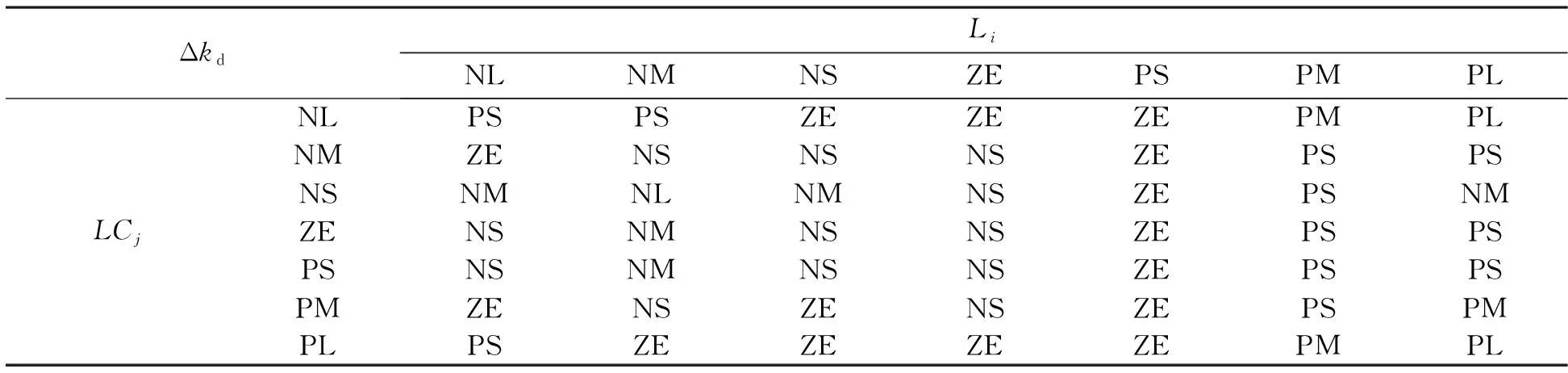
表6 Δkd模糊控制规则Table 6 Fuzzy control rules of Δkd
按照Mamdani法的Max-Min法则作模糊推理:
(1)
式(1)中:μLi为Li的隶属度函数;μLCj为LCj的隶属度函数;μUij为Uij的隶属度函数;μU为综合各个μUij后推理得到的输出量隶属度函数。
由重心法去模糊化得:
设计使用Matlab2016的模糊编辑器计算出l与lc在[-3,3]上Δkp、Δki和Δkd各自的清晰值曲面,然后离散化建立数据表存入STM32,输入不同组合的l与lc查表实现PID参数的自适应调整。
5 测试数据及分析
5.1 基于KNX通信的照明监控功能测试
KNX通信功能测试的线路结构如图12所示,KNX电源选用台湾明纬公司开发的KNX-20E-640。首先在PC上位机上使用ETS3软件设置各元件物理地址和各通信对象的关联组地址,然后在EITT3软件中测试各元件间照度数据采集报文及远程照度设置报文的收发,并在EST3中进行在线监控,各报文收发均正常,这说明系统的KNX通信及照明监控功能运行成功,并得到KNX通信单元性能测试数据(表7)。

图12 KNX通信功能测试的系统线路Fig.12 System diagram of KNX communication function test

性能指标数值传输速率/(bit·s-1)9 600单字符传输时间/ms1.35总线供电电压/V30KNX通信单元运行功耗/mW203
5.2 LED驱动器性能测试
使用10组30 Ω功率电阻替代LED灯,在不同输入电压Ui条件下,分半载和满载两种情况测试驱动器样机,得到能效与功率因数数据如图13所示。根据现行的GB/T 24825-2009《LED模块用直流或交流电子控制装置性能要求》[21]可知,该LED驱动器在半载时,功率因数仍能达到95%以上,满足国标要求,而能效仍能达到90%以上,能效等级为1级,达到最高等级。图14为输入220 V满载时,由示波器直接读取的半桥LLC谐振模组及恒流驱动模组输出电压波形图,横轴为时间轴,每格100 μs,纵轴为电压轴,每格20 V,下方曲线为LLC谐振模块输出给恒流模组的电压波形Uo_LLC,上方曲线为恒流模组输出给LED灯的电压波形Uo_LED。
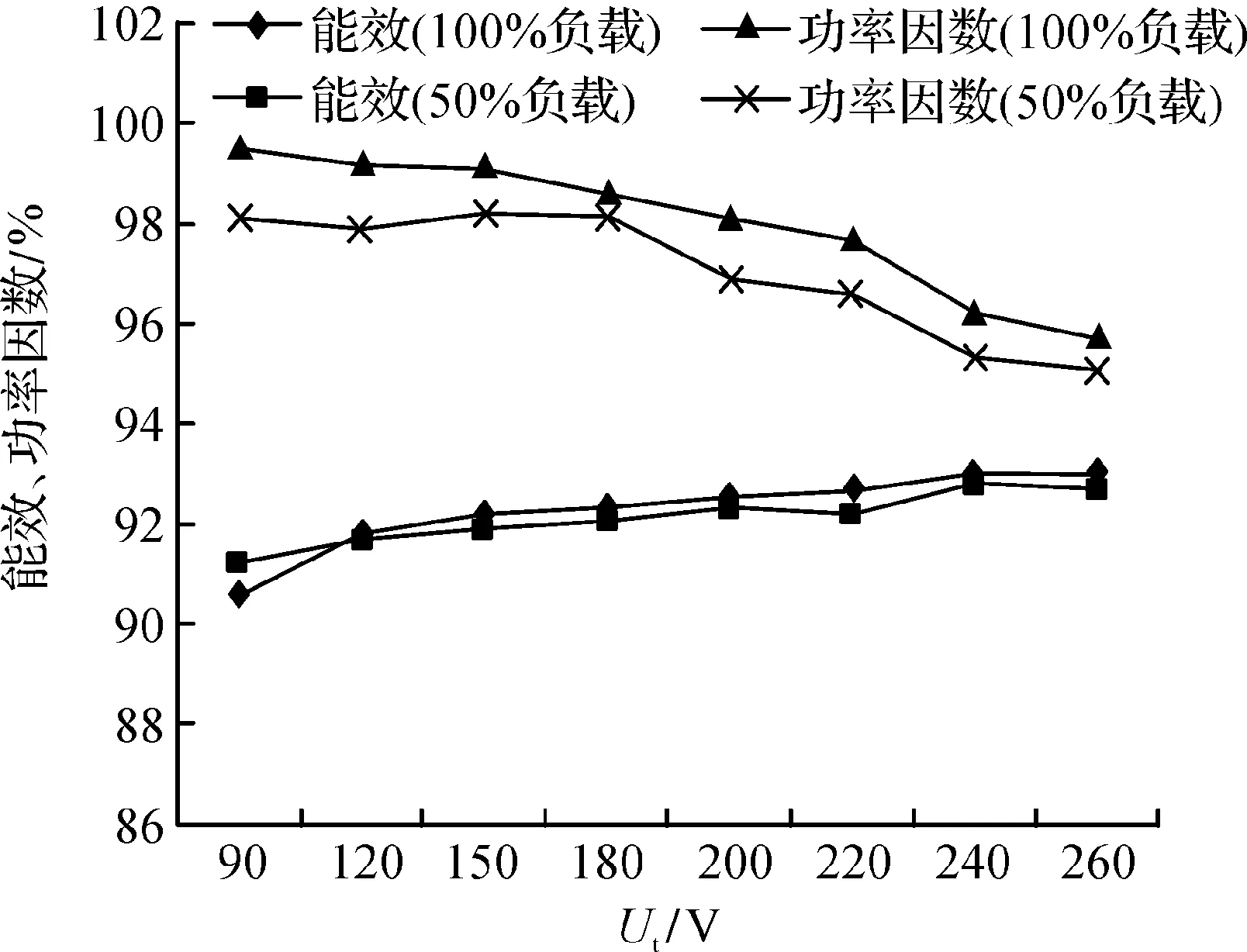
图13 两种负载时LED驱动器性能曲线Fig.13 LED Drive performance curves under two kinds of loads

图14 半桥LLC谐振模组及恒流驱动模组输出电压试验波形图Fig.14 Experimental waveforms of output voltage of half bridge LLC resonant module and constant current output module

5.3 变论域PID恒照度控制测试
在输入交流电压220 V下,分别采用变论域PID控制和论域固定的模糊PID控制进行10路LED灯恒照度控制测试,环境照度设置值为300 lx,得到不同自然光亮度下会议室内平均照度误差(表8)。由表8测试数据可知,在不同的自然光照度下,系统使会议室内平均照度稳定在预设范围内。当自然光照度接近300 lx时,变论域PID照度控制的误差比论域固定的模糊PID更小,性能更优。当自然光照度已超过预设照度,则都能自动关灯。
6 结 论
本设计在LED驱动器硬件上采用boost型APFC电路结合半桥LLC谐振电路与PWM调光的恒流输出电路,实现高能效和高功率因数,并通过KNX通信连接上位机、驱动器与照度传感器,采用数字式变论域PID技术进行照度控制,效果稳定精确,系统开放性良好,未来可通过KNX组网机器视觉等技术,进一步提升系统性能。
猜你喜欢
中国交通信息化(2022年8期)2022-10-28
电气技术(2022年6期)2022-06-27
计算机仿真(2022年2期)2022-03-15
哈尔滨工程大学学报(2021年7期)2021-07-13
成都信息工程大学学报(2021年6期)2021-02-12
中国交通信息化(2020年5期)2021-01-14
计算机与数字工程(2019年8期)2019-09-03
智富时代(2019年6期)2019-07-24
智富时代(2019年6期)2019-07-24
中国交通信息化(2019年4期)2019-07-13