基于自适应观测器的风机传动系统故障估计
2018-12-14 12:56:18宋昌举文传博
自动化与仪表 2018年11期
宋昌举,文传博
(上海电机学院 电气学院,上海 201306)
风能,作为一种清洁、可再生能源,已成为人们解决能源缺乏问题不可或缺的力量[1]。风力发电是有效利用风能最主要的形式,但由于风电设备安装环境一般在高山和海边比较恶劣的环境下,而且风力发电系统运行复杂,当系统出现参数不确定时,对系统的控制将更加复杂[2]。因此对风机可能产生的故障进行快速有效的估计,确保风力发电系统能安全可靠的运行具有重要意义。
在风电机组的众多故障中,传动系统的故障发生率最高[3],风电机组传动系统故障主要有传感器故障、齿轮箱故障及轴承故障等,传感器是传动系统中最基本的元件,也是最容易发生故障的[4]。如果故障传感器的输出信号被用于系统控制器的输入,将会对闭环反馈控制产生影响,对风力发电系统输出异常的控制量,导致系统性能降低[5]。因此对系统中传感器单元进行实时故障检测显得尤为重要。
当前的几类故障检测方法有基于解析模型[6-7],有基于信号处理方法[8],以及基于知识的方法[9]。其中,基于模型的方法中,观测器法又是应用最为广泛的,可以对产生的各类故障进行准确估计[10]。近年来,基于观测器的故障诊断方法有了很多的关注,文献[11]提出了一种基于未知输入状态观测器的设计方法,却在实际的应用方面有一定的局限性;文献[12]是将文献[11]设计观测器的方法应用到了风机执行器的故障诊断中,但是其输出只能为确定的情况;文献[13-14]采用的是基于滑模观测器对传感器的故障检测,仅仅是对状态方程为线性且没有未知参数的情况下的观测器设计;文献[15]是一种将自适应算法与滑模观测器相结合,研究了执行器和传感器故障重构的问题,但是不能保证观测器稳定性。本文针对系统状态方程含有未知参数且输出方程也可以带有未知参数的系统,提出了一种将自适应算法与状态观测器相结合的故障估计方法,与有关文献相比,摒弃了传统通过将输出方程含有的未知参数转换在状态方程中的设计方法,设计了一类根据残差信号分析的故障估计的自适应率算法,并对观测器的稳定性进行了证明,最后应用在了风机传动系统的速度传感器的故障检测上,实现了所设计的观测器可以对系统故障的有效估计。
1 风机传动系统建模
风力发电机组非线性传动系统的动力学建模分为刚性轴和柔性轴模型,考虑到本文所设计的观测器需求选择建立适应性较强的刚性轴模型进行研究,根据文献[2]得到刚性轴模型的传递函数如下:

系统在实际运行中可能会受到噪声的干扰,可将上式转化为状态空间模型:

在实际运行中,将叶轮的气动转矩作为系统的输入转矩,由贝兹理论可得:

式中:ρ为空气密度;Cr为转矩系数;R为叶轮半径;V为实际风速。
2 问题描述

式中:x(t)∈Rn、 y(t)∈Rm分别表征系统的输入和输出;θ(t)∈RP表示系统的未知参数; fs(t)为转速传感器故障信号。
同时对上述系统做如下假设:
假设1对任意的输入φ均为x的Lipschitz函数,即存在 γ1>0 使得:

假设2存在γ3>0使未知参数θ满足如下有界的条件:

假设3存在常数α,γ,ε和任意正定对称矩阵P,满足如下不等式:

假设4存在某个矩阵函数 g(x,t),使得相对于式(6)方程的解P满足以下等式:
对模型(1),考虑到系统在实际运行中受到噪声的干扰和在建模时需要考虑的误差,将h(t)表示为 φ(x,t)θ,其中 φ(x,t)为非线性函数,θ为未知参数。
假设风电机组传动系统的转速传感器发生故障,系统的数学模型可描述为

3 观测器设计
基于上文的假设,可对模型(2)设计如下自适应观测器:


定理当系统式(2)在满足假设条件的情况下,存在常数β,选择如下增益矩阵L:

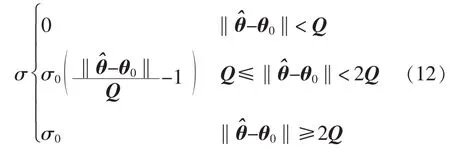
并采用如下的参数调整律:

其中:Q>0
则自适应观测器(8)可以使状态估计误差是一致有界的。
求V的一阶导数如下:
根据Cauchy-schwarz不等式,对任意正定矩阵P,有:
然后将式(10)中增益矩阵 L带入式(13)中,再由式(14)和(15)便可以得到如下结果:
然后假设‖θ-θ0‖≤Q,可得:


因此,M≤0,证毕;立,系统的动态误差趋近于零,因此式(8)所设计的观测器可以确保观测器的动态误差是渐进稳定的,证明完毕。
4 实例仿真
根据文献[8]提供一台300 kW风力发电机的运行参数,该发电机组采用定桨距的控制方式,桨距角为0°,额定风速为12 m/s,风机的仿真参数如表1所示。
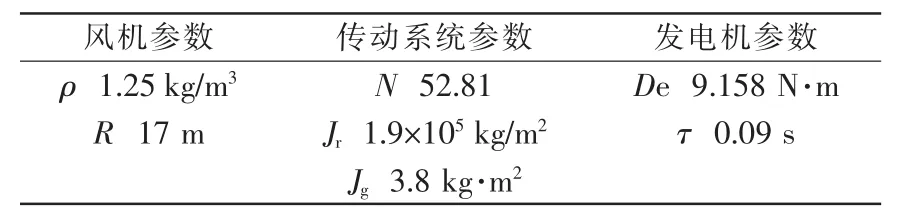
表1 300 kW风力发电机仿真参数Tab.1 300 kW wind turbine simulation parameters
将表中数据带入式(1)中,可得系数矩阵分别为
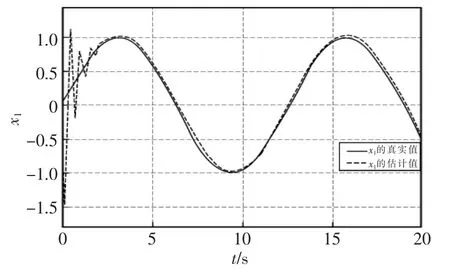
图1 x1的真实值和估计值Fig.1 True and estimated values of x1
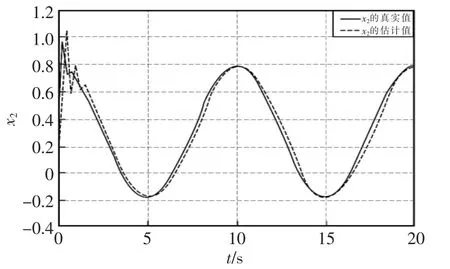
图2 x2的真实值和估计值Fig.2 True and estimated values of x2
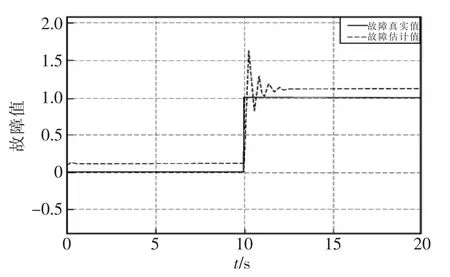
图3 传感器的故障估计Fig.3 Fault estimation of sensor
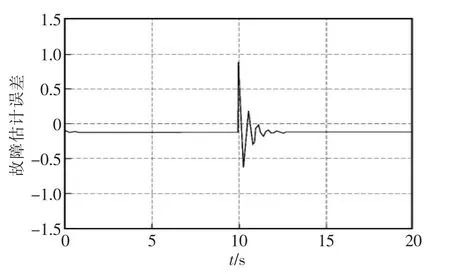
图4 传感器故障估计误差曲线Fig.4 Sensor fault estimation error curve
在图1和图2中,虚线为所设计观测器对系统的状态向量进行估计,可以看出在相应合适的观测器增益矩阵和自适应参数调节律的情况下,本文设计的观测器能对系统的状态进行有效的在线估计。
由图3可以看出,所设计的自适应观测器,在系统发生故障时,能大致估计出故障的状态,虽然观测误差初时较大,但是很快故障估计值将逼近故障真实值;由图4可知,虽然在故障发生瞬间,估计误差波动较大,但在随后便稳定在零域附近。说明针对风力发电机转速传感器突发故障,故障估计的数值基本上可以实时跟踪真实的故障状态,自适应观测器不仅对故障向量可以准确的估计,还可以观测其故障值大小。因此,通过上述仿真结果验证了本文所提的故障估计方法的有效性。
5 结语
针对风电机组传动系统的速度传感器发生故障,提出了一种基于自适应观测器的故障估计方法。首先建立了传动系统的状态空间模型,然后根据模型设计了观测器,通过设置合适的增益矩阵和自适应参数调节律,使系统能在线的进行调节,利用了Lyapunov方法证明了系统在稳定的条件下,可实现对系统故障的准确估计。接着根据残差信号设计故障估计自适应率的算法,当系统传感器发生故障时,对所发生故障向量的进行了快速估计,最后对传动系统进行仿真,仿真结果表明了本文所提方法的可行性和有效性。
猜你喜欢
中学生数理化·八年级物理人教版(2023年6期)2023-05-25 11:59:36
疯狂英语·读写版(2023年12期)2023-02-20 18:41:06
中国造纸(2022年8期)2022-11-24 09:43:38
一重技术(2021年5期)2022-01-18 05:42:12
电子制作(2018年10期)2018-08-04 03:24:26
山东工业技术(2016年15期)2016-12-01 05:31:27
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电测与仪表(2015年19期)2015-04-09 11:32:56
电测与仪表(2014年11期)2014-04-04 09:21:36