
农业科技展览馆智能服务机器人的方案设计
2018-12-11 07:06付根平张世昂朱立学
现代农业装备 2018年5期
付根平,张世昂※,朱立学
(1.仲恺农业工程学院自动化学院,广州 510225;2.仲恺农业工程学院机电工程学院,广州 510225)
0 引言
随着智能机器人、人工智能、互联网+、物联网、云计算、智能移动终端等技术的发展和进步,使得智能服务机器人正逐渐成为机器人行业高度关注的新兴热门产业[1],越来越多的智能服务机器人应用在政务、税务、银行、医院、展馆、图书馆大厅等场所[2],替代传统人工做导游、解说员等工作,为人们提供业务办理、信息咨询、迎宾接待、政策宣传等服务[3]。
与传统人工在科技展览厅做导游接待或解说员相比,智能服务机器人不仅可以替代人工完成部分简单、重复的工作,还可以克服人工效率低、需要请假休假、培训上岗成本高、情绪不稳定、讲解形式单一、互动性差等缺点[4],并且不会疲累,能够保持积极的工作状态,机器人通过语音与观众互动、充当导游、聚拢人气,可以配合视频和图片推送协助进行内容讲解,以图、声、文并茂的方式,让娱乐互动与信息展示一步到位,给参观者耳目一新的感觉[5]。此外,智能服务机器人集各种高新技术于一身,且其外观具有强烈的科技感,更容易引起观众的兴趣和吸引观众的注意力。因此,设计一种应用于农业科技展览馆的智能服务机器人,具有重要的应用价值和广阔的市场前景。
本文设计一种适用于农业科技展览馆的智能服务机器人,将互联网+、大数据、云技术、人工智能、智能移动终端等先进技术融入到机器人设计中,使其具有自主导航、语音交互、触摸屏交互、人脸识别、移动终端控制、云端数据管理、礼仪迎宾、自主充电、安全保护等功能,为农业科技展览馆的现代化和智慧农业的实现提供强有力的技术支撑和应用平台,提高农业科技展览馆的影响力、吸引力和服务品质。
1 智能服务机器人的功能需求分析
基于互联网+、智能移动终端、人工智能,以及云计算、云共享、云存储等先进技术思维对智能服务机器人进行设计,使其成为众多先进技术的载体,为农业科技展览馆服务。智能服务机器人在农业科技展览馆的使用需求,应该具备以下主要功能:
1.1 自主导航
智能服务机器人需要在农业科技展览厅内按照设定路线或者自主任意移动,要求机器人在自主导航遇到障碍物时,能够识别障碍物并规划避让路径,实现自主避让、柔性运动。因此,机器人需要通过相应的传感器感知和识别展览馆环境,并进行建模、构建环境地图。同时要求机器人在移动中速度平稳,且具有一定的转向能力。
1.2 语音交互
智能服务机器人在展览馆内接待参观者,语音交互是最重要的方式,因此,要求机器人具备语音识别、人机对话的语音交互功能,要求机器人能够说普通话、英语、粤语等多种语言。此外,还要求机器人能够声源定位,根据说话的声音实时调整位姿,能够面向客户进行语音交流。智能服务机器人通过人机语音交互形式进行礼仪接待、展厅参观引导和展览内容讲解。
1.3 触摸屏交互
为使用户与智能服务机器人实现更好的人机互动,机器人需配备分辨率高、响应速度快、尺寸大的触摸显示屏,用户可以根据屏幕显示内容或触摸显示屏与机器人互动,实现机器人参数设置、农情信息查询、宣传图片、视频或音频播放等功能。
1.4 人脸识别
智能服务机器人应具有人脸识别功能。先通过摄像头对客户脸部信息进行采集,再通过相关的人脸检测、人脸识别算法识别客户的身份信息,从而对部分重要客户进行身份认证,实现对客户信息的精确管理。
1.5 移动终端控制
通过在智能手机、平板电脑等移动终端安装相应的APP软件,实现远程监控和管理智能服务机器人,例如设置机器人的移动速度、调整语音音量,开启激光导航模式,播放宣传片等。也可以在手机等移动终端远程监控机器人的工作状态和科技展厅的环境。
1.6 云端数据管理
由于智能服务机器人在科技展览馆迎宾接待、人机对话中需要与观众交流信息,回答问题,介绍农情等内容,故要求智能服务机器人自身必须具备相关的知识和数据信息储备,为此,需在机器人端建立一个离线数据库,存储相关数据信息。基于互联网+、云计算、云平台、云存储等先进技术,能够通过在云端平台对智能服务机器人的各种数据信息进行上传、储存、编辑、更新等远程管理功能,并且能够在云端远程管理机器人。
1.7 礼仪迎宾
礼仪迎宾是智能服务机器人的重要功能之一,要求机器人能够接待到展厅参观的客户。机器人能够做展厅导游,通过自主导航引导客人按照预定路线参观科技展厅,并做相应的内容讲解和问题解答。
1.8 自主充电
由于机器人需要长时间连续工作,且其内部电路板、控制器和元器件较多,耗电量大,因此,不仅要求机器人的电池容量大、续航时间长,更要求机器人能够自主检测电池电量并自动找充电桩充电,而且要求充电时间短,以保证机器人正常的工作时间。
1.9 安全保护
由于科技展览馆环境复杂,障碍物和参观者较多,因此机器人必须具有防碰撞功能,保护机器人和参观者的安全。此外,机器人长时间连续工作,且自身空间相对密闭,散热较差,加之其内部电路板、控制器等元器件较多,线路复杂,发热量大,容易导致短路和温度过高,故要求机器人具有短路保护、过热保护功能;而且机器人移动中驱动轮可能被卡死导致电动机被烧坏,因此,需具备电动机堵转保护功能。
2 智能服务机器人各功能模块方案设计
为了让智能服务机器人能够实现预期的各项功能,下面将分别介绍各主要功能模块的设计方案。
2.1 自主导航模块
自主定位导航是机器人实现智能化的前提之一,是赋予机器人感知能力和行动能力的关键。智能服务机器人要在农业科技展览馆内实现自由移动,或者按照预设路线行走,需要通过自主定位导航模块,对周围环境进行识别、判断和地图构建,实现避障和路径规划[6]。目前,服务机器人常用的定位导航技术有磁条定位导航、视觉定位导航、超声波定位导航、红外线定位导航、GPS定位导航和激光定位导航等。
磁条定位导航依靠粘贴在地面上的磁条和RDID标签进行定位与导航[7]。实际使用中,磁条定位导航最为准确、可靠,但要在地面上铺设磁条轨道,施工费用高,且磁条导轨更改线路比较麻烦。况且,有些场地不适宜铺设磁条轨道。
视觉定位导航应用领域广泛,但图像处理量巨大,一般计算机无法完成运算,实时性较差,而且受光线影响大,无法在黑暗环境中工作[8]。
超声波定位导航成本低廉,可以识别玻璃、黑体等红外传感器识别不了的障碍物,但容易受周围环境以及障碍物表面粗糙等因素的影响。此外,采集速度慢,导航精度差。
红外线定位导航能实现远距离测量,在无反光板和反射率低的情况下能测量较远的距离,有同步输入端,可多个传感器同步测量,测量范围广,响应时间短[9];缺点是检测的最小距离太大,受环境的干扰较大,对于近似黑体、透明的物体无法检测距离;有其它遮挡物时无法正常工作,需要多个位置安装接收天线,铺设导轨,造价较高。
GPS定位导航在移动导航中,接收机定位精度受卫星信号状况和道路环境的影响,同时还受到时钟误差、传播误差、接收机噪声等诸多因素的影响,因此,仅利用GPS导航定位精度较低、可靠性不高,所以在机器人的GPS定位导航中通常还辅以磁罗盘、光码盘等数据。另外,GPS不适用于室内机器人的导航,以及对位置精度要求较高的机器人。
激光定位导航的原理和超声波、红外线类似,先由激光器发射出激光信号,根据光电探测器接收到物体反射信号的时间差来计算距离(如图1所示),然后依据发射激光的角度来确定物体和激光发射器的角度,从而得出物体与发射器的相对位置(如图2所示)。该方法性能稳定、可靠、精度高,连续使用寿命长,后期改造成本低;缺点是激光雷达成本较高。激光雷达凭借良好的指向性和高度聚焦性,使得激光雷达和SLAM技术相结合的激光SLAM成为当前智能服务机器人主流的定位导航方式,协助服务机器人实现自主定位导航与路径规划、环境扫描、识别与三维重建等。

图1 激光测距原理示意图
综上所述,本智能服务机器人拟采用激光雷达为主实现自主定位、环境识别和地图构建,辅以摄像头、超声波传感器、红外传感器、避碰传感器等多种传感器,通过融合多种传感器信息,全方位对展厅环境进行检测、识别,实现自主定位、避障和路径规划,以此保证智能服务机器人和参观者的安全。

图2 激光测得障碍物的相对位置
此外,为了使智能服务机器人运动平稳且不容易摔倒,同时具有一定的转向能力,机器人的运动系统拟采用2个驱动轮和4个万向轮组成的轮式移动机构,它不仅能使机器人实现直线运动,而且能通过差分控制两驱动轮的转速实现一定角度的转向功能。而4个万向轮既保证了机器人的稳定性,又使得机器人可以实现转向功能。
2.2 语音交互模块
智能服务机器人的语音交互模块需要实现人机对话、接收语音控制指令、自主讲解等形式,其中人机对话和回答客户提问的语音识别流程基本相同,如图3所示。机器人先通过麦克风采集客户说话的语音信息,将其预处理后通过无线网络上传至科大讯飞语音识别云端平台识别出语音中的字,然后将识别出的字组合后结合相应的语义数据库和相关算法理解语义,机器人根据识别的语义优先从自身数据库中搜寻答案;如果在自身数据库中搜寻不到合适的答案,则转向云端平台和网络继续搜索,如果还搜索不到合适答案,则给出“不知道”的回答。最后机器人把问题答案通过喇叭播报出来,从而实现了人机对话或者回答客户提问的功能。
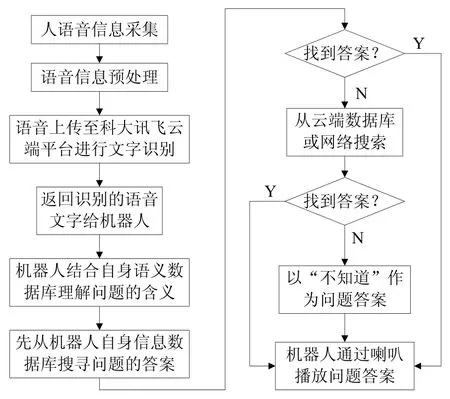
图3 服务机器人人机对话语音识别的流程框图
而机器人自主讲解功能则少了识别和理解语义的环节,根据工作场景自主从数据库或者云端平台找到相应需要讲解的内容,通过喇叭播报出来即可。
因此,语音交互功能要求机器人必须具备麦克风和喇叭,而软件上要有相应的语音识别模块,同时机器人一直要保持连网状态,以便利用科大讯飞云端的语音识别平台识别语音文字和上网搜寻相关的内容。
2.3 触摸屏模块

图4 手动点击触摸显示屏
为了更好地实现用户与服务机器人的人机交互,要求在机器人身上配备一个分辨率高、响应速度快、尺寸大的触摸显示屏,可以选用1 080 P高清电容式触摸显示屏。一方面,通过点击触摸屏设置和查看机器人的相关参数、工作状态,查询农情、浏览机器人自身资源等,如图4所示;另一方面,机器人也可以在触摸屏上显示与人对话的内容,播放视频、音频或图片内容。
2.4 人脸识别模块
服务机器人在礼仪迎宾中需要自主识别一些重要客户的身份,然后提供相应的接待服务。而人脸识别是当前应用广泛、准确度高、技术成熟的身份识别方式。该服务机器人可以采用如图5所示的人脸识别流程框图,通过在机器人头部加装摄像头,当机器人通过人体识别传感器检测到有人接近时,通过控制头部关节自由度调整头部位姿朝向客户,然后由摄像头对客户脸部信息进行拍照采集,再通过相关的人脸检测、人脸识别算法,结合预先录入到自身图像数据库中的客户脸部信息,通过比对识别出客户的身份信息,从而对客户进行身份认证,实现对客户信息的精确管理。
为了能够清晰地采集顾客的脸部信息,保证图像质量,摄像头要选择人脸识别专用高清镜头,可以考虑选择1 080 P机器视觉专用高清镜头。

图5 人脸识别的流程框图
2.5 移动终端控制模块
借助于各类应用APP的智能手机、平板电脑等移动终端已逐渐成为人们日常生活中的重要工具。作为一种便携性强的交互载体,智能移动终端将在服务机器人中发挥重要的作用,它在服务机器人控制、实时监控等方面均有广泛应用。用户通过智能手机、平板电脑可以对服务机器人直接遥控操作、参数设置和指令控制。
基于物联网、互联网+、云平台和手机移动终端等技术,通过在手机端安装专为该智能服务机器人研发的APP软件,以此实现在手机移动端远程监控和管理机器人,如图6所示。比如,可以在手机APP上远程设置机器人的移动速度和转向角度、调整喇叭音量等参数,也可开启激光导航模式,调整机器人的工作方式,也可以播放宣传片等。此外,还可以在手机端通过控制安装在机器人头上的摄像头和麦克风,实时采集展厅现场的图像和语音信息,远程监控机器人的工作状态和科技展厅的环境。

图6 手机移动终端远程监控智能服务机器人
2.6 云端数据管理模块
图7 云端管理智能服务机器人的数据
计算机与网络技术的深层次进化出现了以云计算、云存储等为代表的云系列技术。针对不同服务需求,云技术可以为智能服务机器人提供共性技术的解决方案与平台[10]。由于需要在智能服务机器人端建立一个离线数据库,其内容主要包括农业科技展览馆简介、农情概述、特色种植产业介绍、特色农产品宣传和推广等,而数据形式为文字、图表、视频和音频等。一般可以通过移动硬盘或U盘拷贝等传统方式管理机器人上的数据,显然这种方式操作复杂、效率较低。
为了更方便、快捷地对智能服务机器人端的数据进行管理,可以利用当前非常热门的互联网+、云计算、云平台等先进技术,在云端数据管理平台上登录机器人的账户,如图7所示,对该服务机器人的各种数据、图片、视频和音频等信息进行远程上传、编辑、更新、删除等操作,也可以设置机器人的相关参数,管理机器人,使得机器人按照期望的状态运行。同时也可以在云端远程查看机器人的工作状态,远程监控机器人,防止其出现异常状况。
2.7 礼仪迎宾模块
对于礼仪迎宾功能,智能服务机器人先通过人体检测传感器判断是否有人接近,再通过人脸识别功能自主识别出客户的身份,然后接待该客户到展厅参观并提供相应的导游服务。因此,需要先在机器人身上安装红外人体检测传感器,一般安装在身体前面,且左右边各一个,可以检测从左右两边经过的行人。机器人能够通过自主导航做展厅导游,引导客人按照预定路线参观科技展厅,并做相应的内容讲解和问题解答。
2.8 电池模块
由于智能服务机器人需要长时间连续工作,而且机器人内部电路板、控制器和元器件较多,耗电量大,因此,为了提高电池的续航能力,要求机器人的电池容量大,同时为了减轻机器人的重量,故可以选择容量大、质量轻的锂电池组。另一方面,要求机器人能够自主快速地充电,故选择先进的充电技术,提高充电电流,缩短充电时间。当机器人检测到电量过低时,可自主寻找充电桩充电,待充电结束后继续投入使用。此外,该机器人充电电量和充电时间可以调节,可根据实际需求,灵活安排机器人的充电时间。
2.9 安全保护模块
为了使智能服务机器人具有较好的防碰撞保护功能,一是通过超声波传感器和红外传感器等检测障碍物,判断机器人周围是否存在障碍物,若存在则给出相应控制信号调整机器人的位姿和朝向,改变移动路径以避开障碍物;二是通过在机器人身上安装多个触碰开关,当超声波和红外传感器因距离太近或者盲区无法检测时,可由触碰开关检测机器人是否接触到障碍物,若接触到障碍物则给出相应的控制信号,让机器人调整位姿转向。因此,防碰撞功能由超声波、红外传感器和触碰开关联合实现。
针对机器人的短路保护和过热保护功能,在电路中加装自恢复保险丝,在相应的大功率电机驱动管上加装散热片。同时,可以在机器人空间充裕的地方加装一个散热风扇,将体内热量排出。
此外,在硬件设计电动机过流检测电路和自恢复熔断保险丝,同时结合软件程序控制切断电动机驱动电源,以此保护电动机因堵转而过流时不会被烧坏。
3 总结
根据智能服务机器人应用于农业科技展览馆的使用需求,分析了机器人应该具备的功能,并给出了各功能模块的设计方案。按照该设计方案制作智能服务机器人样机,即能实现期望的各项功能,满足在农业科技展览馆的工作要求。
猜你喜欢
党员干部之友(2022年9期)2022-09-17
江苏商论(2022年5期)2022-05-10
成都信息工程大学学报(2021年6期)2021-02-12
阅读(快乐英语高年级)(2019年5期)2019-09-10
电子制作(2019年14期)2019-08-20
电子制作(2019年9期)2019-05-30
小说界(2018年5期)2018-11-26
全球定位系统(2015年4期)2015-02-28
全球定位系统(2015年4期)2015-02-28
全球定位系统(2015年4期)2015-02-28
