
基于空间相关的ADS-B欺骗干扰检测方法
2018-12-11 07:25吴仁彪
中国民航大学学报 2018年5期
吴仁彪,陈 蕾,卢 丹
(中国民航大学天津市智能信号与图像处理重点实验室,天津 300300)
ADS-B技术是一种新的监视技术,通过结合全球卫星定位系统实现精确定位,相比于传统监视技术具有成本低、更新速率快等优点,但其广播特性和信道不加密的特点,使系统的安全性面临极大风险,非常容易受到欺骗干扰的影响,目前已有很多实验成功对ADS-B系统实施了欺骗[1-2]。为有效实施干扰,攻击者通常利用一个可产生正确格式和正确调制的ADS-B发射机产生虚假消息,或产生对应于空中不存在的虚假飞机目标的一系列ADS-B消息,欺骗监视系统,或针对空中真实存在的某目标,发射与其对应的虚假消息,使监视系统难以区分真实航迹和虚假航迹,甚至可以更为智能地对真实ADS-B消息进行“删除”,使得监视系统只显示虚假航迹,非常难以察觉,严重威胁空中交通安全。
针对ADS-B的欺骗式干扰问题,国外已开展了很多研究。现有的对抗欺骗式干扰的方法基本可分为3类:①基于密码学的方法[3-7],此类方法需改变现有的ADS-B协议,与现有的ADS-B系统不兼容,通常难于实施;②基于多基站或辅助源的方法,文献[8-10]提出多点定位方法对飞机位置进行验证,文献[11]提出利用接收信号强度(RSS,received signal strength)对航迹进行验证的方法,使用120条消息时可达到较好的效果;文献[12]提出利用时间差来验证航迹真实性的方法,文献[13-14]提出利用多普勒效应来验证消息真实性的方法,但这些方法都需要多个地面站之间同步,复杂度很高;文献[15]提出利用雷达作为辅助源的干扰检测方法,需要辅助源的协助,且需要多个数据源之间的数据融合,也较为复杂;③基于阵列天线验证DOA的方法[16-18],这些方法无需改变现有的ADS-B协议,也不需要其他数据源,不存在时间同步、数据融合等问题,优点较为明显,但需要空间搜索测向,计算复杂度高,且对阵列误差敏感;文献[19-20]虽然提出了一种不需要空间搜索测向的方法,但该方法需要已知阵列流形信息,仍然对阵列误差比较敏感,需要阵列校准。
在此提出一种基于空间相关的欺骗式干扰检测方法,其主要思想是验证飞机相对接收机方向的变化趋势与报文报告的来向变化趋势是否相符;另外,为避免空间中同时存在对应于某真实目标的真实ADSB消息和虚假消息的误检测,还提出了一种信源一致性检测的方法。此方法也属于利用阵列天线的方法,但其无需估计信号来向,且无需已知阵列流形信息,对阵列的幅相误差较为稳健。
1 信号模型及问题陈述
1.1 信号模型
ADS-B所使用的数据链中,以1090ES数据链应用最为广泛,1090ES以1 090 MHz作为载频,采用幅移键控调制,广播包括空中位置消息、地面位置消息、空中速度消息、飞机身份与类型消息等多种类别的消息,每种消息分别由不同帧发送,每帧时长120 μs,其中包含8 μs的报头和112 μs的数据域,数据域采用脉冲位置调制,数据速率1 MHz,图1为1090ES的ADS-B帧格式,在112 bit的数据域内,地址域包含了24 bit的由国际民航组织(ICAO,international civil aviation organization)规定的全球唯一的发射机地址,不同帧的消息字段分别包含了如位置信息、高度信息、速度信息等内容[21]。
ADS-B各帧采用随机的方式接入1 090 MHz链路,同类消息广播时间间隔在一定范围内随机触发,减少了各帧之间的相互交叠,假设ADS-B信号之间不交叠,则阵列天线接收到的任意一帧信号可表示为

其中:a(θi,φi)表示方位角为θi、俯仰角为φi时对应的阵列导向矢量;si(t)为第i帧ADS-B消息的复包络,其可能来自真实目标,也可能来自欺骗干扰源;ei(t)为第i帧消息对应的阵列天线的加性复高斯白噪声,其均值为0,方差为σ2。
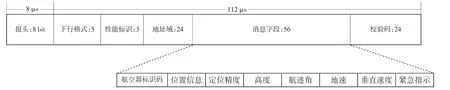
图1 1090 ES的ADS-B帧格式Fig.1 ADS-B frame format of 1090ES
1.2 问题陈述
如前文所述,攻击者可以对空间中真实存在的特定飞机目标进行干扰,如生成与其相同ICAO地址的消息,使监视系统无法分辨真实信息和虚假信息,甚至广播虚假消息的同时“擦除”真实消息,使得监视系统无意识地受到干扰;也可通过发送某空中不存在的ICAO地址的ADS-B消息,造成空中存在飞机的假象,扰乱空中交通秩序。考虑两种对监视系统威胁较大且较易实施的欺骗干扰方式为:
1)欺骗源生成一个或多个虚假目标,每个虚假目标均具备各种类别的ADS-B消息,且各种信息能够组成相应的虚假航迹;
2)欺骗源针对真实存在的目标,对其消息进行修改转发,或直接生成该目标的虚假消息,干扰接收机或监视系统。
2 欺骗干扰检测方法
2.1 基本检测过程
欺骗干扰检测方法的主要思想是通过验证报文中位置信息对应的飞机相对接收机方向的变化与阵列天线计算得出的飞机相对接收机方向变化是否相符来检测虚假目标,为便于说明,假设飞机的运动轨迹如图2所示,检测步骤如下。
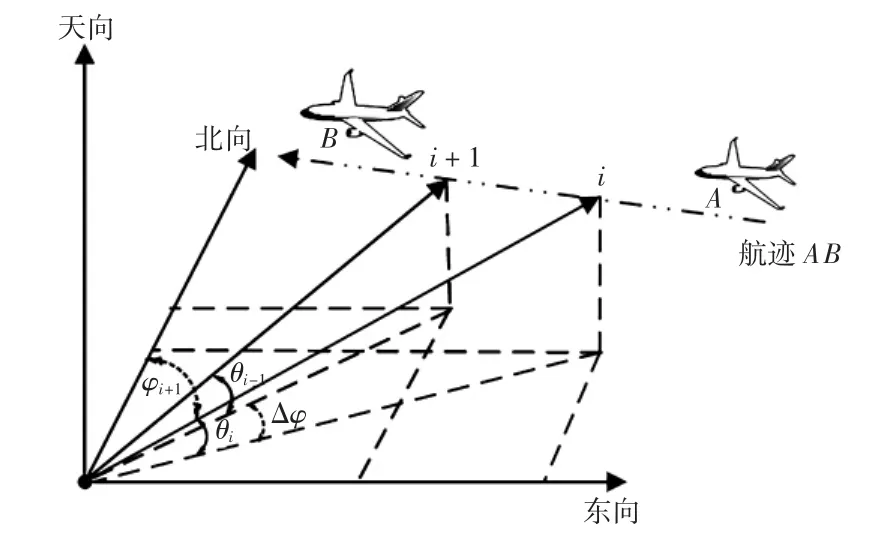
图2 飞机运动状态示意图Fig.2 Aircraft motion state
对ADS-B广播的空中位置消息解码可得到一组经度、纬度、高度信息,将其转换到地心地固坐标系可得其相应的坐标为 C(xc,yc,zc),地面接收机的位置坐标也已知为R(xr,yr,zr),那么可计算出一组在地心地固坐标空间中的方向向量组

如图2所示,假设在航迹AB中,第i个位置处所对应的俯仰角和方位角分别记为θi和φi,第i+1个位置处所对应的俯仰角和方位角分别记为θi+1和φi+1,其中,θi+1=θi+Δθ,φi+1=φi+Δφ。那么记两方向向量分别为

求其夹角余弦有

则可由Yi表征两位置对应的角度变化,进一步可得到一组表征角度变化的量

另一方面,对于阵列天线接收到的第i帧消息xi(t),计算其协方差矩阵Rxxi,并对其进行特征值分解可得

其中

λ21≥λ22≈…≈λ2M≈σ2,M 为阵列天线的阵元数,取特征矩阵Ui中最大特征值对应的特征向量记为ui,如1.1节所述,不考虑信号帧之间的交叠,认为每一帧信号仅仅包含同一个信号源发送的一帧ADS-B消息,则此时有

其中,c为复常数。于是可进一步得到一组特征向量组

假设阵列使用M元均匀线阵,其阵元间距为d,此时,计算在第i个位置时的特征向量和第i+1个位置时的特征向量的夹角余弦并取模的平方,由式(6)可得
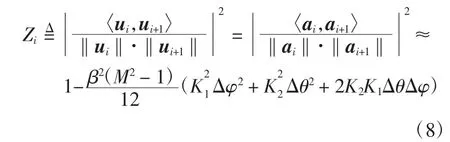
其中
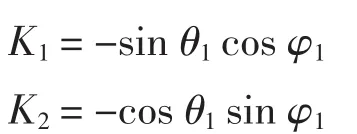
因而可由Zi表征两位置对应的角度变化,同样可进一步得到一组角度变化量

为便于说明,将上式中由报文计算的结果中的角度分别记为Δθrpt、Δφrpt;由阵列信号计算的结果中的角度分别记为 Δθest和 Δφest。
当Δφ>Δθ时,有

当Δφ<Δθ时,有

当Δφ=Δθ时,有
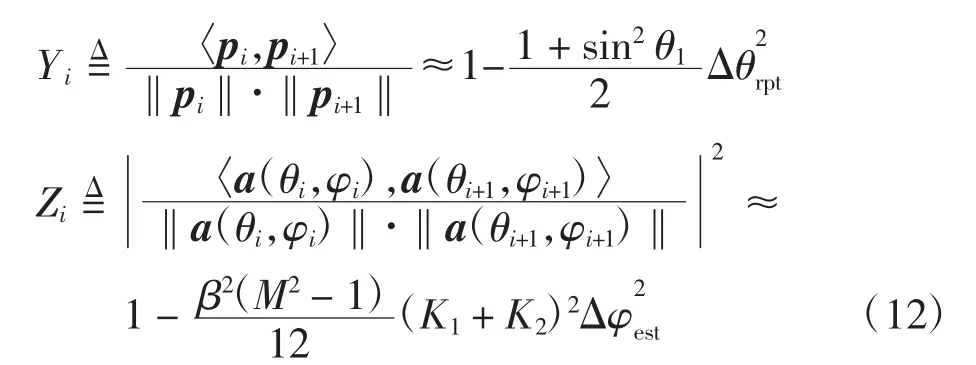
综合式(10)~式(12)可发现,Y和 Z都是表征对于同一个角度的变化,对于真实目标,有Δθest=Δθrpt和Δφest=Δφrpt,而对于欺骗目标,则不存在此关系,所以可进一步求相关系数为

其中,μY=E(Y),μZ=E(Z),分别表示Y 和 Z 的均值;DY=E(YHY)-E2(Y),DZ=E(ZHZ)-E2(Z),分别表示Y和Z的标准差。

设定检测门限为ε,若则判定为真实目标,否则判定为虚假目标。
2.2 信源一致性检测
如1.2节中2)所述,当地面站接收到对应于空中真实存在的同一目标的一组消息中,既包含真实目标发送的真实ADS-B消息,同时又包含欺骗源发送的虚假消息,根据上一节所述的检测方法进行检测时,由于虚假消息的存在,可能会导致误检测。为提高检测方法的可靠性,还提出了一种信源一致性检测的方法,利用阵列天线得到的特征向量组,判断对应于同一飞机目标的一组消息的波达方向是否具有连续性,具体的检测方法如下。
对于一组消息X={x1,…,xn},根据上述相关步骤,可得出一组特征向量组U={u1,…,un},其中每一个特征向量都包含了与此信号相应的波达方向信息,考虑到波达方向的变化具有连续性,那么特征向量组中相邻向量的相关性较强,当真实信号中存在虚假消息时,由于欺骗源与真实目标的位置存在较大差异,将会导致其相关性急剧下降,因此计算

可得到一组余弦相关序列为

设定门限ξ,若

则表明第i+1条消息xi+1与其前一条消息xi来自同一信源,反之则认为其与前一条消息来自不同信源。若判定X={x1,…,xn}中所有消息均来自同一信源,则通过信源一致性检测。否则,可根据具体的判断情况重新对X进行分组,并进行2.1节所述的检测过程,判断出真实的消息组和虚假消息,进而得到真实航迹。
如图3所示,所提欺骗干扰检测的总体流程如下:
1)利用接收机对接收信号进行解码,选出其中的空中位置消息,并按ICAO地址将空中位置消息进行分组,将报文中的三维位置进行坐标转换,进一步得到方向向量组;
2)对ADS-B消息组,根据接收到的阵列信号计算协方差矩阵并进行特征值分解,进而得出特征向量组;
3)计算特征向量组对应的余弦相关序列G,进行信源一致性检测,若通过检测,则进入下一步骤,否则进入步骤6);
4)对来自同一信源的空中位置消息组,分别计算步骤1)和步骤2)中所得方向向量组及特征向量组对应的两组表征飞机相对于接收机方向角变化的序列Y和Z;
5)计算步骤4)中得到的两序列的皮尔逊相关系数,通过与门限对比,判定真实目标和虚假目标;
6)对步骤3)中来自不同信源的空中位置消息组重新进行分组,并重复步骤2)到步骤5)。

图3 算法流程图Fig.3 Algorithm flow chart
3 仿真实验
为了充分验证算法的有效性和稳定性,设置了不同的场景进行仿真。首先,对欺骗源注入虚假目标的欺骗干扰进行仿真。
假设接收机位置为经度117.362 1°、纬度39.108 8°,高度30 ft(1 ft=0.304 8 m,下同),利用以接收机为中心、半径20 km范围内的1 000条航迹生成的高保真仿真数据进行实验,其中包括真实航迹和虚假航迹各500条,消息信噪比设定为20 dB。欺骗源位于地面,考虑到地面上建筑物的遮挡效应,设定欺骗源位于接收机附近5 km范围内随机分布。图4为每条航迹选取50条空中位置消息进行实验时的经验累积分布函数,可看出真实航迹的最小相关系数ρRmin=0.79,而虚假航迹的最大相关系数 ρSmax=0.39,即当 ε∈(0.39,0.79)时,则可明确区分真实目标和虚假目标。
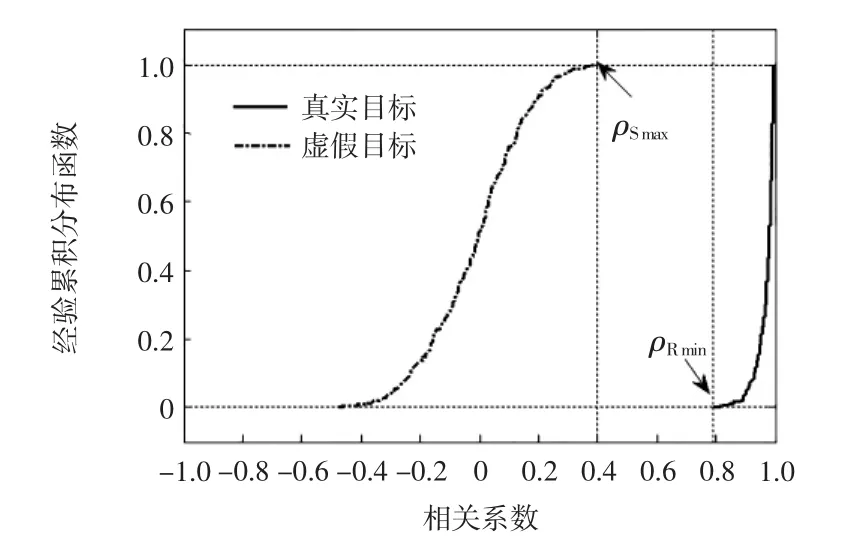
图4 50帧消息的仿真结果Fig.4 Simulation result of 50 frame messages
接收机位置不变,利用以接收机为中心、半径为30 km范围内的1 000条航迹生成的高保真仿真数据进行实验,真实航迹和虚假航迹各500条,消息信噪比设为20 dB,所有航迹均对应于巡航高度,速度为800 km/h,欺骗源位于地面接收机附近5 km范围内随机分布。设定判决门限为0.5,随信号条数不同漏检概率和误检概率的变化曲线如图5所示。结果显示,当信号条数为25条时,漏检概率和误检概率均低于0.5%。文献[11]也需利用多条信号来检测欺骗式干扰,但其所提方法需要至少50条空中位置消息才能达到误检概率0.5%左右(漏检概率文中没有给出)。文献[12]提出的方法同样也需利用多条信号来检测干扰,但所提方法需发射机发送位置消息时同时发送时间信息,并且需要3个甚至3个以上接收机,其检测结果为25条空中位置消息时可达到1.4%的误检概率和1.2%的漏检概率。
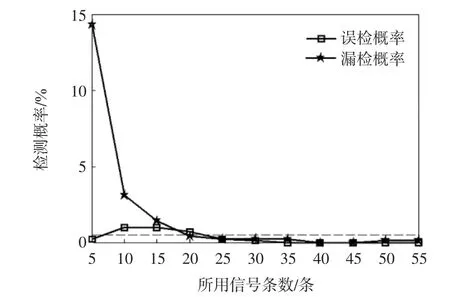
图5 不同信号条数对应的检测结果Fig.5 Detection result of different numbers of messages
在实际应用中,由于各通道可能包含很多有源器件,随着周围环境的变化以及使用时限的增加,会导致各通道的放大器对接收信号的增益和相位改变不一致,引起幅度误差和相位误差,不同于阵元位置误差和阵元间互耦效应引入的非时变误差,阵列的幅相误差属于时变误差,通常难以校正,导致使用阵列天线来检测欺骗干扰的方法难以实际应用。为验证研究方法对阵列幅相误差的稳健性,设定幅度误差和相位误差均由服从均值为0、方差为0.2的高斯函数随机产生,加幅相误差后的检测结果如图6所示,对比图5可发现,幅相误差对检测结果基本无影响。
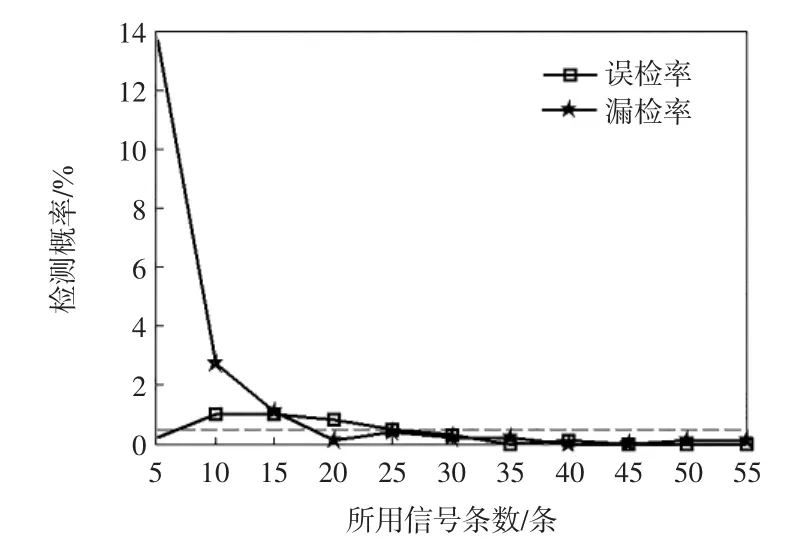
图6 存在幅相误差时的检测结果Fig.6 Detection result with amplitude and phase errors
对2.1节所述欺骗源对真实目标注入欺骗干扰消息的情形进行了仿真,假设接收机位置为经度117.362 1°、纬度39.108 8°、高度30 ft;欺骗源位置为经度117.0°、纬度 39.0°、高度 10 ft;真实航迹为从位置(117.27°,39.08°,34 000)到位置(117.43°,39.07°,34 000),欺骗源从此段航迹的第15条位置消息(相应的三维位置坐标为(117.34°,39.075°,34 000)) 开始实施欺骗干扰,并破坏掉此目标发出的真实ADS-B信号(具体的操作方式见文献[1]),欺骗航迹与接收航迹的经纬度位置如图7所示。检测结果如图8所示,设定检测门限ξ=0.9,可见在第15条信号处特征向量的余弦相关值发生突变,余弦相关值Z15<0.9,即前15条消息来自同一目标,第16条到第30条来自另一目标。
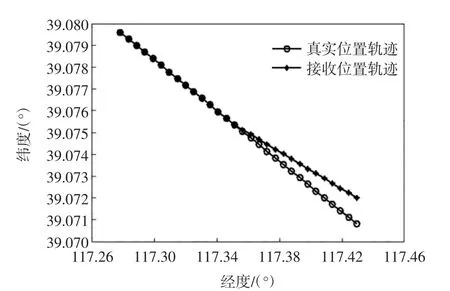
图7 真实航迹与虚假航迹示意图Fig.7 Illustration of real and cheat tracks
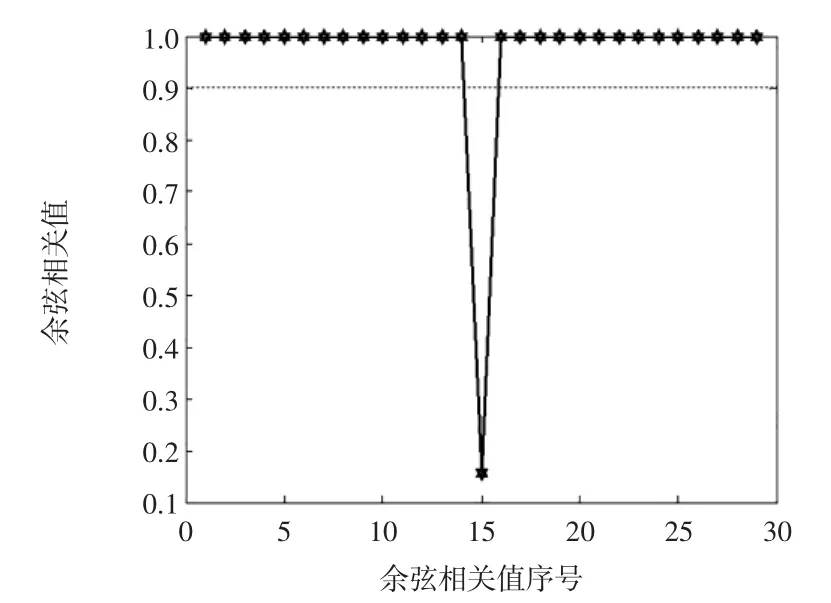
图8 对真实目标注入欺骗干扰消息的检测结果Fig.8 Detection result of real target with injected spoofing messages
4 结语
针对ADS-B系统的欺骗式干扰问题,提出了一种基于空间相关的干扰检测方法,对于某目标报告的一组航迹,根据其报文内容可计算一组变量表征目标相对于接收机方向的变化趋势,另一方面,根据阵列天线接收的信号也可计算一组同样表征此方向变化趋势的变量,最后通过计算两组变量的相关系数判断真实目标和欺骗干扰。此外,还提出了一种信源一致性检测的方法用于降低误检测概率。虽然所提方法基于利用阵列天线的接收机,但无需使用阵列流形信息,也无需求取信号的波达方向,对阵列天线中难于校准的幅相误差有良好的稳健性,实用性较强。通过大量的仿真实验验证了算法的有效性,在信号数量足够多时,算法提供了良好的检测结果。
猜你喜欢
九江职业技术学院学报(2022年1期)2022-12-02
无线电工程(2022年4期)2022-04-21
保定学院学报(2022年2期)2022-04-07
科学与生活(2021年17期)2021-11-10
雷达科学与技术(2020年1期)2020-03-28
青年歌声(2019年12期)2019-12-17
火力与指挥控制(2019年1期)2019-06-15
数学大世界(2019年7期)2019-05-28
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16
