
基于粒子群优化的自抗扰算法在嵌入式平台上的应用
2018-12-10 09:14王杰华
山东电力技术 2018年11期
王杰华 ,孙 明,姜 炜
(1.湛江中粤能源有限公司,广东 湛江 524099;2.河北省发电过程仿真与控制工程技术研究中心(华北电力大学),河北 保定 071003)
0 引言
20世纪90年代,韩京清教授吸收PID控制策略优点,结合现代控制理论成果,提出了自抗扰控制技术(Auto Disturbance Rejection Controller,ADRC)[1]。其核心思想是将控制系统中存在的模型误差、扰动及各种不确定性因素作为一个扩张状态,通过扩张观测器进行估计。
自抗扰控制器结构确定后,其控制品质受控制器参数影响。由于自抗扰控制器参数较多,给整定工作带来了困难。粒子群优化算法(PSO)是一种模拟自然界生物捕食过程的智能优化算法,采用了简单的速度—位移模式,其实现过程相对简单,计算速度快,给自抗扰控制器的参数整定工作提供了思路。
采用粒子群算法对自抗扰控制器参数进行离线优化,并结合嵌入式控制平台[2]实时性强、稳定可靠的特点,将自抗扰控制器应用于嵌入式平台上。
1 自抗扰控制器
1.1 扩张状态观测器
扩张状态观测器[3](Extended State Observer,ESO)是自抗扰控制器最重要的组成部分。n阶非线性系统一般可表示为

式中:w(t)为外部扰动、不确定性因素;b为被控对象参数;u为系统输入;f为系统高阶部分、扰动及不确定性因素的综合作用。
对式(1)所示系统,建立一般形式的扩张状态观测器为

式中:gi(e1)(i=1,2,…,n+1)为关于 e1的非线性函数;e1为观测误差。如果取 gi(e1)=e1,则该观测扩张器成为线性状态观测器。在本文中,仅对线性扩张状态观测器进行研究。
1.2 线性自抗扰控制器
图1为二阶线性自抗扰控制器[4]结构,r为系统设定输入;Gproc为被控对象;y为被控量;ESO为系统扩张状态观测器;u为控制量;控制器参数为kp、kd、b0。
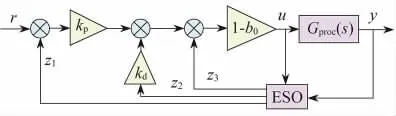
图1 二阶线性自抗扰控制器
工业现场的绝大多数系统可近似为二阶系统,采用式(3)进行描述

式中:b为被控对象参数;g为系统高阶部分、不确定性因素、扰动综合。
定义 f=g+(b-b0)u为对象 Gproc的扩张状态,可得

由图1所示控制器结构可得控制量为

联立式(4)、(5),得

通过式(7)中描述的扩张状态观测器来进行估计

当参数β1、β2、β3选取合适时,扩张状态观测器的观测变量z1、z2、z3可以实现对 y、、 f的准确跟踪,此时,式(6)进一步简化为

式(8)为一个近似的积分串联对象,对该类型对象,采用比例微分控制器进行控制,控制律如式(9)所示。

1.3 参数整定
由式(7)可得扩张状态观测器的特征方程为

将观测器极点配置到负半轴同一位置,即令(s+ω0)3=0,可得

式中:ω0为观测器带宽。
由式(8)、(9)可得系统闭环传递函数特征方程为

将极点配置到负半轴同一位置,即令(s+ωc)2=0,可得

式中:ωc为控制器带宽。
此时,控制器参数被简化为b0、ω0、ωc。
2 粒子群优化算法
2.1 适应度函数
给出一种典型的综合型函数

式中:t为时间;e(t)为t时刻系统期望输出与实际值偏差;u(t)为 t时刻控制量;ts为仿真时间;w1、w2为误差指标与能量指标权值。
2.2 实现方法
假设在一个N维的目标搜索空间中,有m个粒子,其中第i个粒子的位置为 Xi=(xi1,xi2,…,xiN),i=1,2,…,m;速度为 Vi=(vi1,vi2,…,viN)。 计算目标函数Q(Xi)可比较Xi的优劣。设粒子i走过若干步以后,个体最优位置记为 Xbesti=(xi1,xi2,…,xiN),适应度值记为 Qbesti,粒子群经历的最优位置记为 Xbestg=(xg1,xg2,…,xgN),其对应的适应值即全局最优解记为Qbestg,则每个粒子根据式(15)来更新自己的速度[5]。

式中:t为当前时刻;t+Δt为粒子前进一步后的时刻;i=1,2,…,m;j=1,2,…,N;c1为认知因子;c2为社会因子;r1,r2为 0~1 之间的随机数;c1,c2分别代表向个体最优值与全局最优值前进的速度权值。
粒子有了飞行速度后,即可更新自己的位置,即

3 嵌入式平台
3.1 硬件平台
该平台处理器采用摩托罗拉公司基于PowerPC体系结构的MPC8560芯片,该芯片具有内存大、运算速度快、安全可靠、低功耗的特点。

图2 嵌入式平台现场搭建
系统整体架构如图2所示。为了保障系统整体运行的安全可靠,嵌入式平台、以太网交换机、电源等设备均采用双备份,一套系统运行时,另一套处于监控跟踪状态,一旦主平台发生故障,可即时无扰切换至备用平台运行。
嵌入式平台通过交换机与上位机软件进行通信,互为冗余的两个嵌入式平台通过RS485串口实现主从站状态监测判断,通过网络通信接口实现运算数据实时备份。嵌入式平台通过RS485总线与现场设备连接,通过MODBUS通信协议进行数据交互。
3.2 软件运行环境
由 WindRiver 公司开发的 VxWorks[6]嵌入式操作系统以其良好的运算实时性、可靠性、可拓展性在工业、军工等领域得到了广泛应用。自抗扰控制算法将依托VxWorks操作系统进行实现。
上位机软件提供了逻辑组态搭建、实时趋势、监控界面设计等功能,依托友好的界面和操作方式实现复杂运算逻辑的搭建及运行过程的监视、指令下发。
系统逻辑组态的运算则依托嵌入式平台完成,由上位机软件对搭建的逻辑组态进行排序后生成下装文件通过网络通信传输至嵌入式平台,嵌入式平台解析后即可根据下装文件中给定的模块类型、运算次序、运算周期等进行实时计算。
3.3 算法实现
每个嵌入式平台中可以运算多个自抗扰控制算法,每个控制算法都涉及一套模块参数,嵌入式平台会根据下装文件中自抗扰控制器数量动态开辟内存空间,当按照运算次序进行模块轮询时,将需要计算的自抗扰控制器参数整体传送至自抗扰控制算法中即可。
自抗扰控制器计算过程中按照偏差计算、扩张器状态更新、控制量计算、控制量限幅限速输出4个步骤进行。
4 仿真研究
某600 MW超临界直流锅炉过热器通过对喷水扰动下气温动态特性进行机理分析[7],得到50%负荷下惰性区对象传递函数为

4.1 控制器参数优化
通过试凑法确定参数的大致取值,并确立表1所示参数优化区间,输出速率为0.05,输出幅值限制为[-2,2],依托 Matlab平台,采用粒子群优化算法按照表2参数进行寻优,得到表3所示结果。
优化前后被调量、控制量曲线对比如图3、图4所示。

表1 控制器初始参数及优化区间

表2 粒子群优化算法参数设置

表3 优化后参数值

图3 优化前后被调量曲线对比
4.2 仿真控制
在上位机软件上搭建逻辑对自抗扰控制器进行仿真,如图5所示。得到图6所示控制曲线。从实验曲线可以看出,嵌入式平台上运行结果与仿真结果一致,粒子群优化算法优化得到的控制器参数大大提高了系统控制品质,给控制器参数的整定及优化提供了一条新思路。

图4 优化前后控制量曲线对比

图5 上位机软件搭建的仿真逻辑

图6 嵌入式平台仿真曲线
5 结语
介绍二阶线性自抗扰控制器设计及粒子群优化算法,并将粒子群优化算法应用于自抗扰控制器参数的整定优化上,配合上位机软件在嵌入式平台上对自抗扰控制算法进行了实现及仿真研究。实验表明,粒子群优化算法对于自抗扰控制器参数优化、控制品质提高具有显著效果,基于嵌入式平台的自抗扰控制器实现给自抗扰控制的工程应用提供了稳定可靠的平台。
猜你喜欢
中学生数理化(高中版.高考数学)(2022年1期)2022-04-26
家庭影院技术(2021年7期)2021-08-14
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
数学小灵通(1-2年级)(2020年6期)2020-06-24
电子制作(2019年7期)2019-04-25
铁道通信信号(2018年2期)2018-04-18
北京航空航天大学学报(2017年6期)2017-11-23
中学生数理化·八年级数学人教版(2017年2期)2017-03-25
铁道科学与工程学报(2015年5期)2015-12-24
