
以小型低成本无人机进行大型考古遗址航测的新探索
——以赤峰辽中京遗址为例
2018-12-10 09:20
自然与文化遗产研究 2018年11期
(北京大学考古文博学院,北京 100871)
1 背景介绍
1.1 辽中京遗址概况
辽中京遗址位于今内蒙古自治区宁城县大明镇境内,东距县城15 km。始建于辽圣宗统和二十五年(公元1007年),为辽代五京之一,是辽代中晚期的政治、经济、文化中心。城址所在地为老哈河上游北岸的冲积平原,北、南、西三面环山。北有七金山,《辽史.地理志三》记载“圣宗常过七金山土河之滨,南望云气有郛郭楼阁府库之状,因议建都”[1]。西有草帽山、大黑山,东南有红庙子东山。老哈河自西南向东北流经城外南部平原,北小河自西向东穿城北而过(图1)。金代以原辽中京大定府为北京,元在此先后设北京路、大宁路和武平路等行政机构。明代在此设立大宁都指挥司(后改北平行都司),并封宁王于此,永乐后此城废弃,逐渐辟为牧地,保持至今。
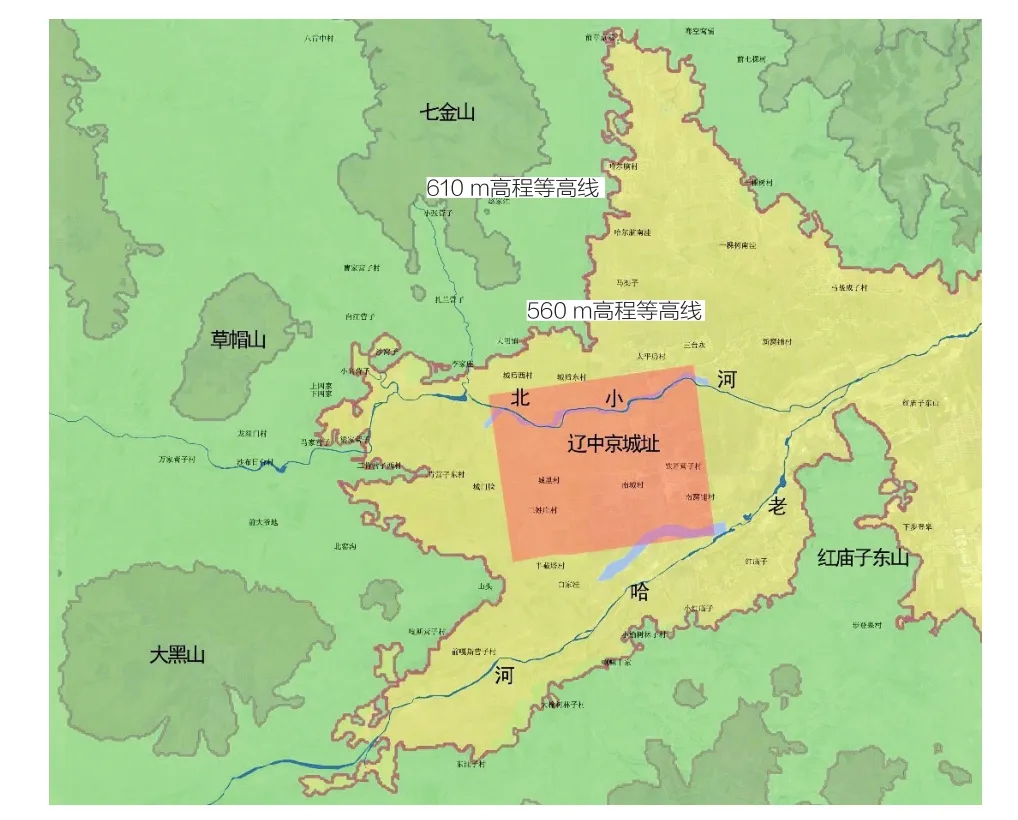
图1 辽中京周边自然环境图(来源:《辽中京遗址保护规划》,北京大学考古文博学院编制,项目负责人:徐怡涛)
辽代中京城共三重城垣:外城南北宽3 500 m,东西长4 200 m;内城在外城北部居中,东西长1 900 m,南北宽1 500 m;皇城在内城北部居中,约为边长1 000 m的正方形。金代对其延续使用,并于辽中京皇城内增筑一小型城堡,于外城南部增筑新城垣。元末因红巾军入侵以及地震破坏,原辽中京北部损毁严重。明代于外城西南修建宁王府,此时的城市规模已大大缩减。现遗址区内大部分为耕地,现存辽、金时期砖石塔3座及大部分城墙和若干夯土建筑遗址,地面随处可见古代砖瓦、瓷片等遗迹、遗物(图2)。
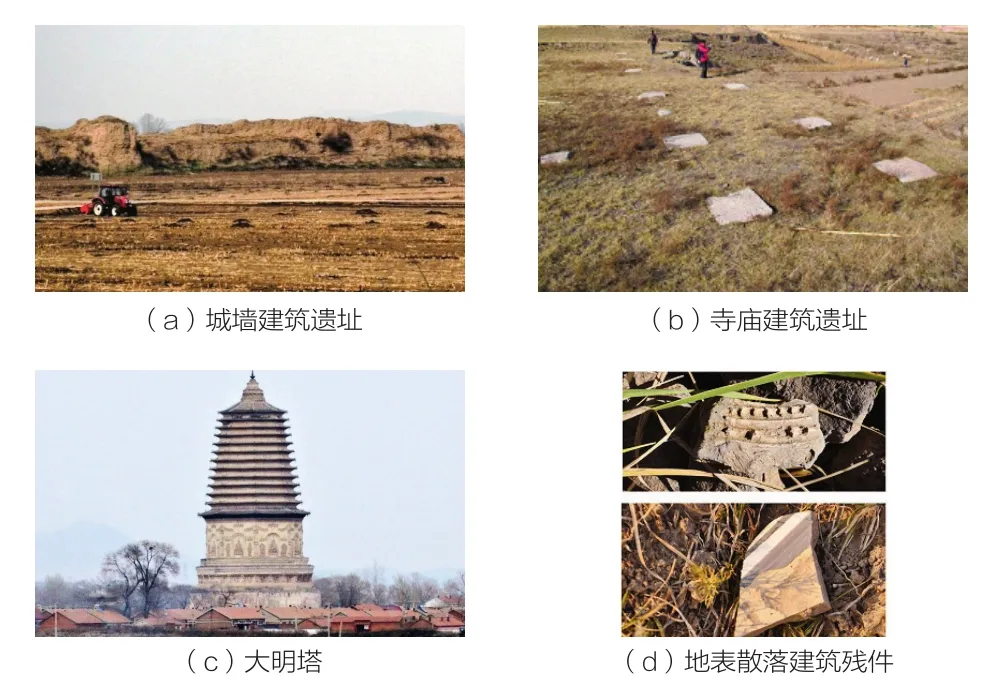
图2 辽中京遗迹、遗物图(来源:作者自摄)
辽中京居于辽代五京的地理中心,在辽王朝的政治、经济、文化等活动中起到了重要的衔接作用,其地面遗存和出土文物为研究辽代政治制度、手工业发展以及文化生活方面提供了重要史料。辽中京建于奚族旧地,其兴建带有控制奚族之目的,另外,辽中京作为“澶渊之盟”后新建的都城,是辽与北宋开展双边交流的重要场所,是研究北方少数民族之间,以及契丹与汉民族交流融合的重要见证。辽中京遗址之上还叠压有金、元、明初各代城址,文化堆积深厚,属古今重叠型城市,为研究辽代及以后北方都城制度、建筑技艺提供了典型案例。
20世纪初,法国、日本曾对辽中京进行了田野调查。1958年,内蒙古文物工作队对辽中京进行较为详细的田野调查,并发表调查简报。1959年4月至1960年11月,内蒙古自治区文化局、内蒙古文物工作队对辽中京进行发掘,重点研究了辽代的城市布局,断定了各文化层的可靠年代以及各时代地下遗迹及遗物的埋藏和分布规律。1961年,辽中京遗址被列为第一批全国重点文物保护单位。1988年,自治区考古研究所对大明塔塔基进行了考古发掘。2002年,自治区考古研究所对半截塔塔基和地宫进行了考古发掘。2012年,受宁城县委托,安徽省文保中心与北京大学考古文博学院共同编制辽中京遗址保护规划。
辽中京属乡村型大遗址,其遗址本体长期受自然与人为两方面因素的破坏,自然破坏因素主要包括风、水、重力、气温等物理要素和微生物、野生动植物等生物要素。导致辽中京遗址本体存在着坍塌变形、生物损害、风化侵蚀、流水冲蚀等病害。人为因素的破坏主要来自人类的生产生活活动、非法盗掘活动等。辽中京城圈范围内分布有5个行政村,城内用地除道路用地、村民住宅用地及相关设施用地外,均为农耕用地。人们于遗址之上的建设、取土、耕作、放牧等活动,以及消耗、排放造成的污染等,时刻威胁着遗址本体的安全;另外,由于辽中京遗址文化堆积深厚,且为开放式环境,盗掘现象屡禁不止,对地上遗存和地下文化堆积均造成破坏。为了对辽中京遗址进行更好的保护、研究、开发与利用,统筹遗址保护与遗址地土地利用、人口调控、生态环境及基础设施建设等区域经济社会的发展,编制遗址保护规划便成为解决上述问题的重要一环。
1.2 研究背景
大遗址保护规划的编制,需要凭借多学科知识的集成[2]。其中,GIS技术与地理学的成果,可以帮助我们分析遗产分布环境、制定针对性的保护措施,也可以辅助、促进考古工作。2007年颁布的《全国重点文物保护单位保护规划编制要求》第三条明确规定:“规划图纸应绘制在近期测绘的现状地形图上,规划图上应显示出现状和地形。”第二十七条也提出,符合国家勘察、测量规定的测绘图(包括各时期的航拍、地形地貌图等)是编制保护规划需搜集、研究的基础材料。因此,获得一张大范围、高精度、符合测绘标准的地形图,是编制保护规划的关键环节。在辽中京遗址保护规划的编制初期,由测绘部门提供的地形图仅有城圈范围内的部分,无法覆盖规划范围,需要予以更换。2017年3月,北京大学考古文博学院徐怡涛教授带领学生再次前往辽中京遗址,根据保护规划的实际需要,利用无人机、RTK等仪器对辽中京规划中建控地带范围内的地形图测绘②相关报道可见北京大学考古文博学院官网:http://archaeology.pku.edu.cn/consultation/news/2017/4/3/1491189432883.shtml。
传统的大地测量方法成本高,时效性和灵活性差。随着无人机航拍技术的进步与成熟,为解决上述问题提供了可能。无人机(unmanned aircraft)是通过搭载远程控制系统进行远程操控的不载人飞行器。无人机航拍,即将航空拍摄系统搭载于无人机平台上,接入远程操作系统,进行远程的航空摄像操作[3]。目前,无人机航测技术广泛应用于基础设施建设、自然灾害监测、矿产资源勘探等领域。近年来,无人机技术也引入了考古界,经过多年的发展与探索,利用无人机、RTK、全站仪等设备进行高空拍照、地形测绘的工作方法已比较成熟,为考古与文化遗产领域带来了极大便利,陕西、河南、浙江等地的大遗址保护中也已经有了成功实践。刘建国在《考古遗址的超低空拍摄与数据处理》[4]一文中对无人机操作、Photoscan建模等内容进行了系统总结。当前,将无人机技术应用于考古工作,逐渐成为学界新的热点。
2 辽中京遗址保护区划航测工作概况
本工作以辽中京遗址为测绘对象,旨在利用摄影测量的方法,获得辽中京遗址及周边地区的航拍图,用于后期的保护规划编制,以及其他研究、存档、监测等工作。此次航拍区域覆盖了辽中京遗址保护范围及其建设控制地带,其中,核心区的辽中京保护范围1 930 hm2,I类建设控制地带1 048 hm2,II类建设控制地带 5 016 hm2,航拍区域达80 km2。
此次工作队共由20人组成,包括指导教师1人、助教1人、研究生6人、本科生12人,学生分为3个工作小组;使用设备包括无人机4架、全站仪1套、RTK 1套、三维扫描1套、移动工作站1台,其他配套设备还有智能手机、平板电脑、单反相机等,另有汽车3辆。根据工作规划,将整个航拍区分为3部分,分别由3组成员负责航拍,历时7 d。
航拍工作共分为两部分:一是前期的现场作业;二是后期的室内制图。现场作业又包括航拍、拼合精度检验、补飞3项工作,航拍主要为利用无人机、RTK等设备获得该航拍区航片,以及部分地物坐标。拼合检验主要为现场利用Photoscan对航片进行快速拼接,检查航片缺漏,指导补飞。后期的室内制图,包括使用Photoscan、AutoCAD、Photoshop等软件对现场测绘所得照片与数据进行处理,获得高精度的航拍区正射影像,大范围的CAD测图等,工作流程图如图3所示。
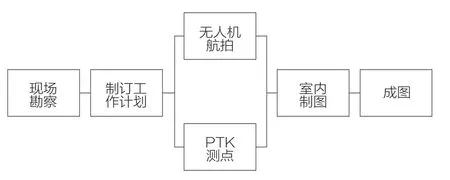
图3 工作流程图(来源:作者自绘)
3 制订现场工作计划
3.1 航拍规划
3.1.1 航拍器的选择
考古工作中常用的无人机一般分为专业级与消费级两种,本次实验使用的无人机均为深圳大疆公司研发的消费级小型低成本无人机,共4种型号,分别为精灵3、精灵4、精灵4pro、御pro(表1、图4)。
航拍器的选择是多因素综合考虑的结果。专业级无人机抗风性能好、续航时间长、拍摄功能强,但存在机身笨重、价格昂贵、摔机损失大、不便携带等问题,并且其使用受到法律限制较多,中间环节复杂。消费级无人机虽然续航时间很短,抗风性与镜头功能也逊于专业级无人机,但价格便宜、小巧便携、法律限制少、使用灵活,近年来逐渐普及,更适用于日常工作。无人机的拍摄功能是航空摄影测量的基础,大疆无人机自身搭载云台相机,拥有一般数码相机主要的拍照功能,为高精度摄影测量创造了条件。各型号的大疆无人机拍摄性能相近,便于统一的航拍规划。

表1 大疆无人机部分参数表

图4 大疆无人机精灵4pro组件图(来源:作者自绘)
总体而言,选择无人机需综合考虑航时、成像质量等因素,镜头精度低的无人机需降低飞行高度,以取得较好的测绘精度;同样航时下,镜头精度低的无人机航测效率较低。无人机性能也影响了后续航拍方法的设定。图5为本次航拍的主要工作与流程。
3.1.2 规划航线
航线规划,是指根据航拍对象、无人机特性和实际操作经验,规划无人机飞行轨迹。一般应首先确定航拍高度,然后确定航线形状。遵循的原则,是以单块电池的安全飞行时间为单位,在保证照片叠压率以及较高精度的前提下,提高工作效率,获得最大的航拍面积。
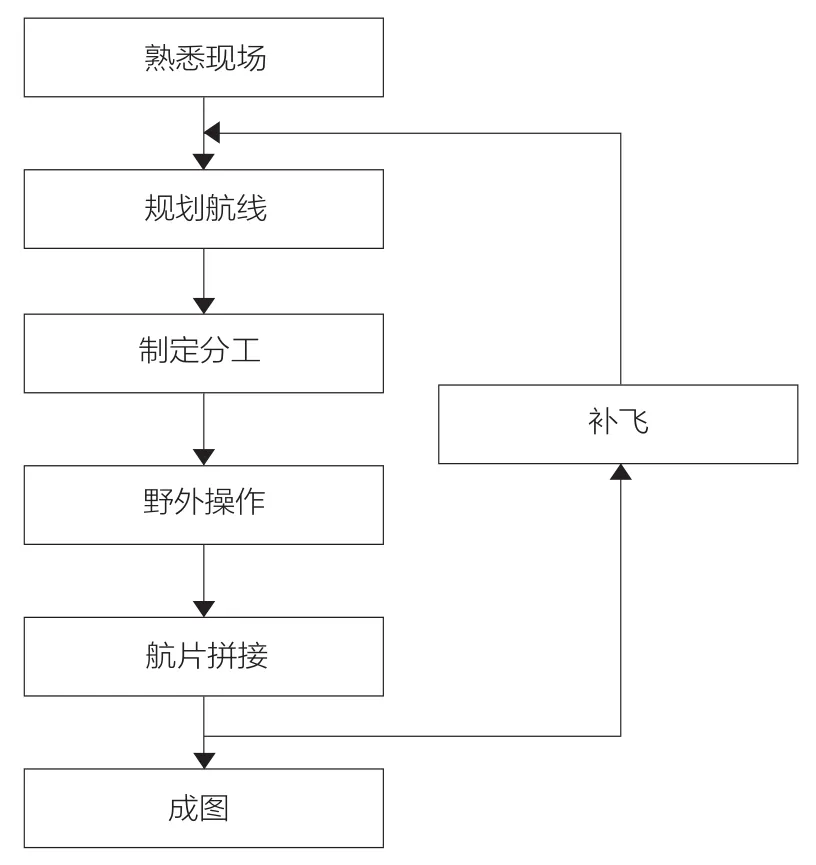
图5 无人机航拍流程(来源:作者自绘)
(1)确定航拍高度。由于辽中京遗址面积巨大,为获得较大的视域,飞机应升至较高高度。本次航拍高度选定为300 m,大疆无人机镜头均为固定焦距,根据镜头参数及光学原理,可计算出300 m高度下,各飞机拍摄照片所覆盖的实际尺度,以及航片的精度(表2、表3)。
通过以上测算可知,若飞机飞行高度为300 m,画幅设定为4∶3,则精灵4与精灵4pro两种飞机拍摄的照片实际尺度为400 m×300 m,精度8.22 cm,基本能满足地形图描图的需要。此规律可以概括为“飞行高度和正投有效范围边长的关系大致为1∶1”。精灵3的照片实际尺度偏大、精度稍低;御的照片实际尺度偏小、精度中等。总体来看,均能满足地形测绘的精度要求。在实际飞行过程中,可将精灵3的实际高度稍低于300 m,御的实际高度稍高于300 m,从而保证此次航拍照片在实际尺度与精度上的相对统一,方便后期的拼合制图。

表2 各型号无人机照片实际覆盖面积测算表

表3 各型号无人机航片精度测算表
(2)设计航线形状。飞行高度确定之后,便可开始规划航线。航线的设计取决于单块电池的安全续航时间和航片叠压率。电池续航时间是无人机工作的首要限制条件,决定了无人机的飞行距离。大疆消费级无人机单块电池续航时间很短,仅为20~30 min。在电池剩余30%电量时系统便会自动报警,若不及时返航降落便有坠机危险。另外飞机飞行高度越高,飞行速度越快,电池消耗越快,低温、大风等恶劣天气也会加速电池消耗。因此不宜使飞机距离操控者太远。
航片叠压率进一步影响了航线的形状。将拍摄模式设定为定时拍摄,拍摄间隔3 s,相邻两张航片保持80%的航向重叠,相邻两航线保持20%~30%的旁向重叠[5]。此方法目前为行业内通行方法,以此为基础设计航线,可保证航片及航带间无空隙,从而获得较高品质的航片,此次辽中京航拍也据此设计航线。
本次航拍以每块电池为单位进行航线规划,每次作业消耗一块电池,获得一小块区域航片,相邻区域影像做到有所重叠。根据“飞行高度和正投有效范围边长的关系大致为1:1”的规律,并综合电池续航时间、照片覆盖率等控制性因素,将此次无人机单块电池航行轨迹规划如下“山”字形路线(图6)。
结合测算与实际经验,山字形航线各数据能够保证无人机始终处于安全飞行距离,航线之间有足够的覆盖率,并将单块电池的工作量发挥至最大;航线整体区块为一矩形,便于计算面积(表4)。以上航线形状与飞机参数均为理想情况下的飞行模式,实际飞行时由于各因素的影响,往往与规划有所出入,但此山字形航线始终是航线规划的基本思路,表格所列数据也发挥着控制性的作用,可作为实际航拍过程中的参考数据。
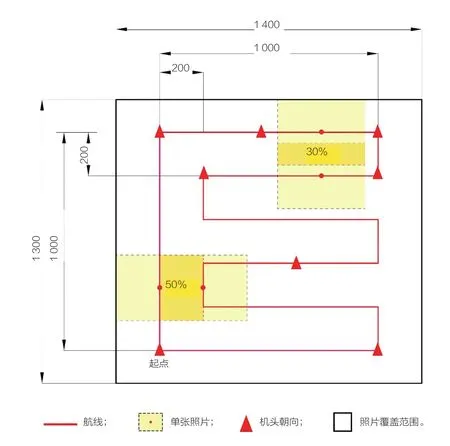
图6 “山”字形航线图(单位:m)(来源:作者自绘 )
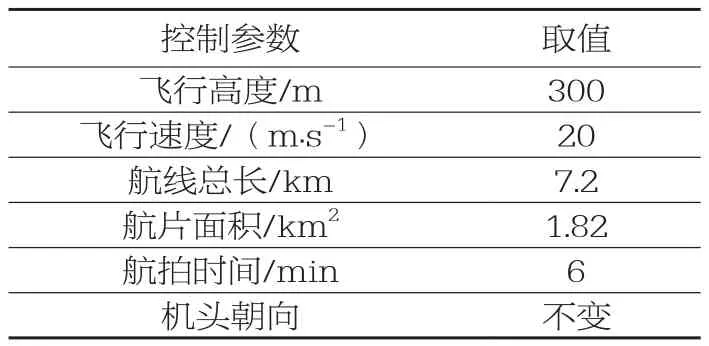
表4 部分航拍控制性参数
3.2 室外、室内分工规划
3.2.1 室外工作
(1)人员、设备分配。此次航拍区面积约80 km2,划分为西、中、东3个部分,由3个小组负责完成(图7),每组4名本科生、1~2名研究生,配1架无人机。大疆无人机每架配备3块电池,全部用完仅需一个上午,3块电池共可拍摄约5.4 km2,为加快工作进度,依照每组每天飞行需用6块电池计算,飞完全部航拍区大约需要4 d时间。一组由于工作区较大,故配给2架飞机,并适当增加人力。
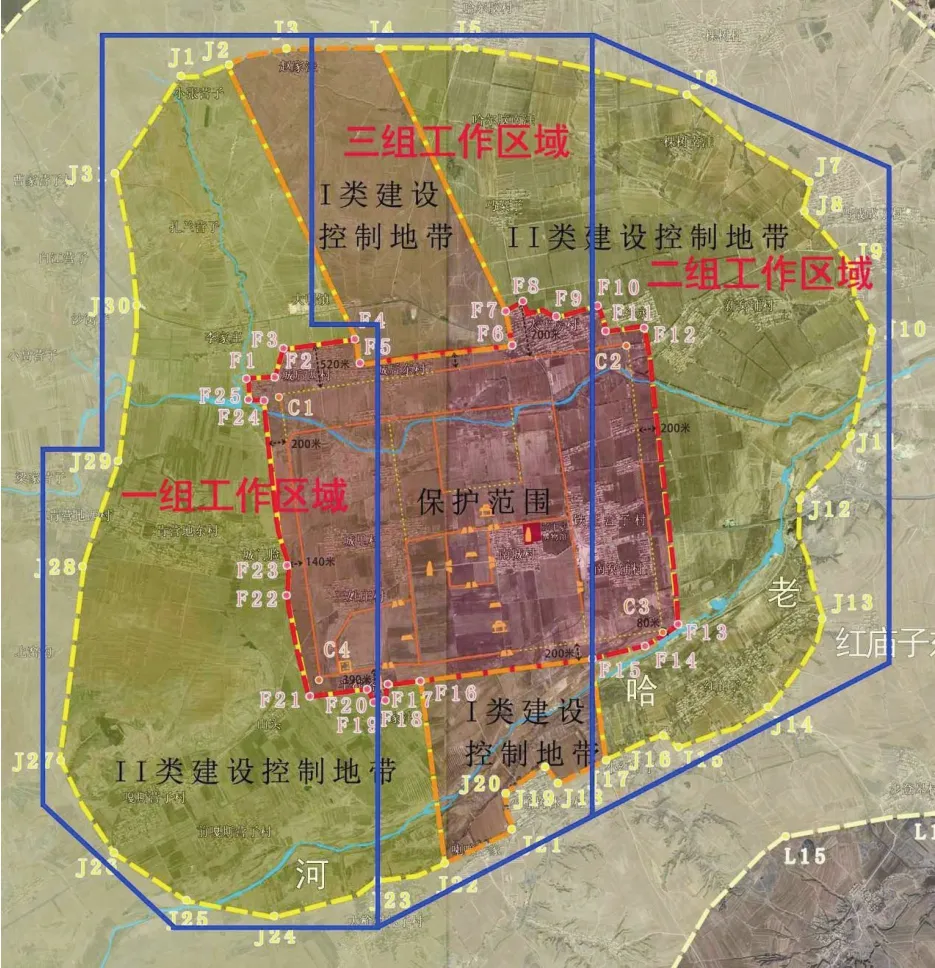
图7 辽中京航拍区划分图(来源:《辽中京遗址保护规划》,北京大学考古文博学院编制,项目负责人:徐怡涛)
(2)起飞点规划。单次航线规划完成后,还需进行起飞点的规划。此项规划由各组根据负责航拍区的实际情况,结合“山”字形航线的规划原则进行,应保证单次航区间的航片叠压率。规划过程中可以利用google earth、奥维浏览器、百度地图等电脑或手机端软件完成,完成后导入手机软件“户外助手”中,便于野外工作随身携带(图8)。
(3)控制点测量规划。大疆无人机自身具备GPS功能,所拍航片自身附有GPS信息,导入Photoscan建模后能够进行一定的测量,但精度并不高,且容易发生错位。此时可借助全站仪、RTK等仪器,于航拍区测得部分控制点的三维坐标,导入Photoscan,对模型进行校正,提高摄影测量精度,并获得准确的正射影像。由于此次航拍区面积较大,航拍高度较高,为保证测量点的科学分布,各测量点之间应有较大跨度。由于RTK具有灵活性高、测点不需要通视的优点,因此选用RTK来进行控制点测量。控制点应选择空旷且具有较为清晰的地表特征之处。
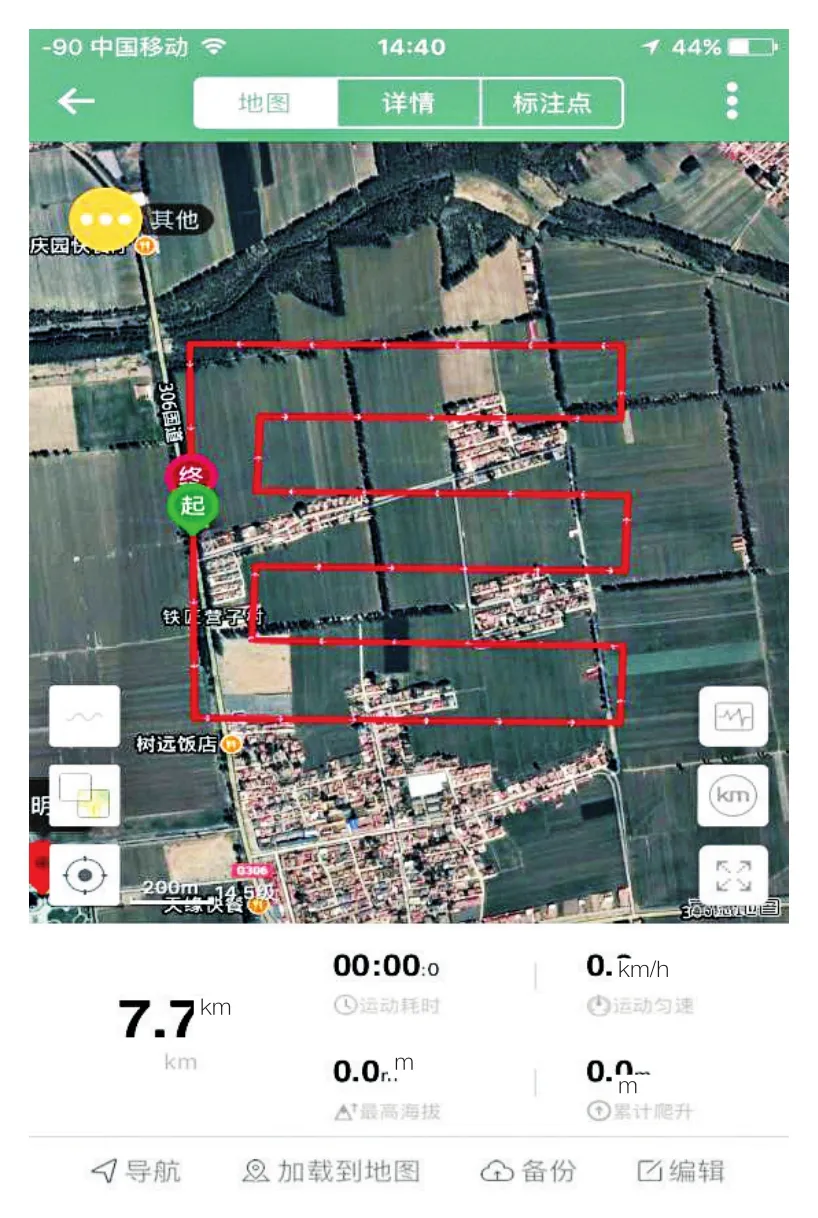
图8 户外助手手机软件界面图(来源:作者自摄)
3.2.2 室内工作
室内工作与室外工作同步进行,主要内容为讨论、调度与航片拼接工作。本次航拍使用的照片建模软件为俄罗斯Agisoft公司研发的Agisoft Photoscan,该软件可基于影像自动生成三维模型,也称多视点三维重建,它可自动匹配由数码设备拍摄的照片,生成被拍摄物体表面的三维点云及纹理,最终合成高质量三维数字模型。完成建模后,软件可以导出正摄影像、DEM数字高程模型等产品,再利用其他电脑软件便可绘制平面线图或制作等高线图。
本次航拍使用的设备是小型低成本的无人机,此类无人机虽然在成本、便携等方面有优势,但由于其续航能力不足、抗风性能较弱等原因,在大遗址航拍中不可避免地要比专业级无人机飞行更多的架次。最终整个航拍区大航片的获得即是将所有架次的航片导入Photoscan统一运算。多架次飞行容易出现2个问题:一是各架次之间出现缺漏;二是单块区域的边缘部分精度下降,这些问题都会影响到大航片的完整度与清晰度。为及时发现这些问题,避免离开现场后折返补飞浪费成本,位于航拍现场的快速拼合检查与补飞尤为重要。
各组室外工作人员于当日午休或傍晚收工之后,将飞机储存卡中照片导出,交给室内工作人员进行筛选片、处理、导入Photoscan照片拼接等工作。各单块区域的航片拼接完成后,再利用Photoscan的控制点拼合功能,将相邻两块或多块区域的航片进行拼合,如此由小到大逐一排查,及时发现缺漏,从而进行有针对性的补飞。Photoscan可将来自不同分组、不同架次的航片进行统一运算,由于最终照片数量巨大,因此回到北京后,将使用台式工作站。
4 现场作业相关技术要点
4.1 拼接
若计算机运行能力强且不需要得到及时成果,可以统一运算各航次所得航片;若在野外只有普通运算能力的计算机,且需要尽快得到成果验证航拍效果或进行应用,就需要分别计算再进行拼合,因此需要控制拼合精度。
Photoscan可以将小块模型自动对准,若自动对准失败,则可换用手动添加标记点的方式对准。在利用控制点对准时,时常会发生区块高低错位的问题,影响了对航拍情况的判断,为探索控制拼合精度的方法,本文选用了大明塔的建模来进行验证。300 m高度下的遗址平面地物起伏不明显,不利于检查拼合精度;大明塔为地面建筑物,高差大、细部特征多,拼合精度更为直观,若拼合成功,则对遗址平面航片的拼合更为适用。
图9是用精灵4pro平飞得到的辽中京博物馆的总平面建模,图10是精灵4pro绕飞大明塔的建模,现直接将两个模型拼合在一起,自动拼合的情况下两模型出现明显错位(图11)。

图9 模型1:辽中京博物馆总平面模型(来源:作者自摄)

图10 模型2:大明塔模型(来源:作者自摄)
此时可使用标记点拼合法提高拼合精度。标记点应选择两个模型的重合点,添加时需仔细对比,保证标记点的准确度。经多次实验发现,标记点选择3个及以上处在同一平面的非线性排布重合点时,拼合精度最高;若无法满足,则应保证点与点之间在X、Y、Z坐标中至少有一个数值相近或相同。
如图12、图13,在拼合两模型时,共添加了6个标记点。其中point1、2、3、4基本位于同一平面,point5、6基本位于另一个平面。选取完毕后将其拼合,得到的拼接模型如图14,拼合较为准确,未出现明显位移,证明此方法有效。
遗址航片的地物以房屋、道路、农林用地为主,在添加标记点时应同样遵循此方法,如位于同一道路平面,或位于相似高度的屋顶之上等。

图11 自动对齐后的拼合情况(来源:作者自摄)

图12 模型1的6个标记点(来源:作者自摄)

图13 模型2的6个标记点(来源:作者自摄)
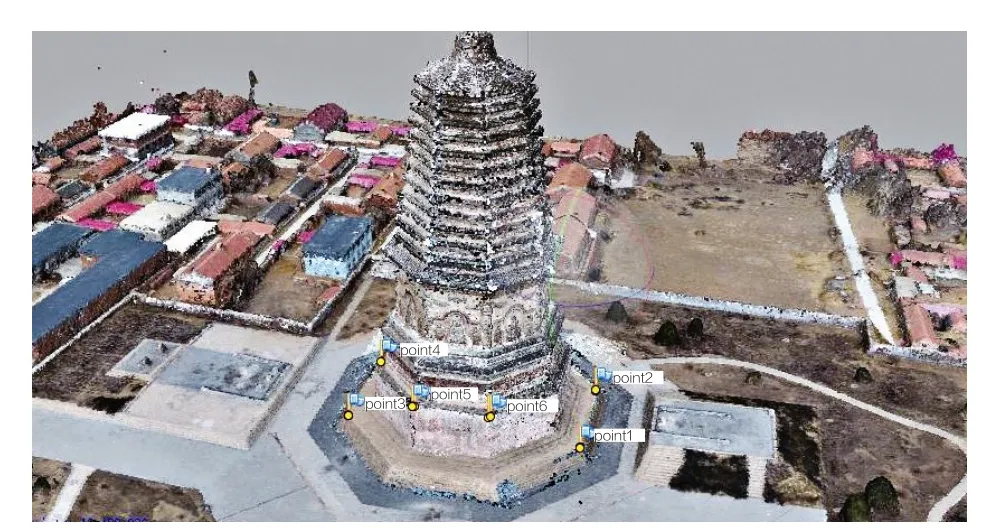
图14 标记点拼合后的拼合情况(来源:作者自摄)
4.2 补飞
经过拼合检验后,发现初次航拍中存在的缺漏、模糊、畸变等问题,须靠补飞弥补。补飞方法与前文基本保持一致,同样需要经过规划、分工、现场操作等步骤,但从实际情况来看,需补飞区块的出现具有分散性、随机性,故补飞航线的形状需灵活制定,不局限于山字形。补飞结束后,再次进行拼合检验。
根据统计(表5),各组都进行了补飞,补飞总架次占到了总架次的19.8%,所占比例较高,验证了补飞工作的必要性。一般而言,航拍面积越大,初次航拍架次越多,补飞的概率也更高。第一组航拍区面积最大,初次航拍架次与补飞架次都较多。二组、三组航拍面积基本相等,前者补飞架次最少,仅为3次,一定程度上表明,若初次航拍操作得当,可有效减少补飞次数。
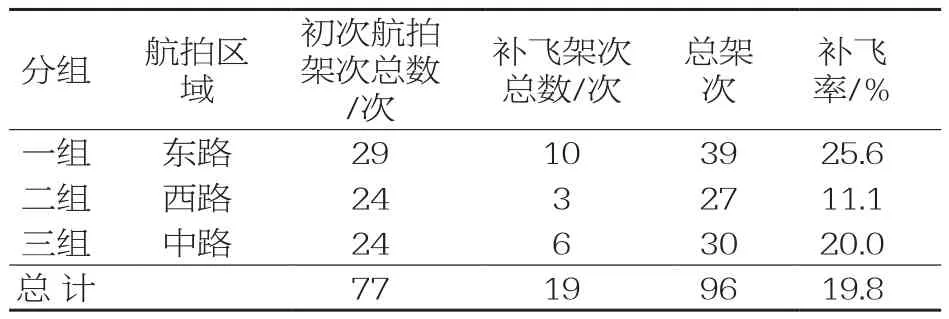
表5 各组补飞架次统计
4.3 小结
初次航拍、拼合精度检验、补飞,构成了小型低成本无人机野外航测工作的3项基本内容。初次航拍在整个航拍工作所占比重最大,发挥着基础性作用;拼合精度检验可以及时检查初次航拍存在的问题,并指导补飞,补飞是对初次航拍的完善,与拼合精度检验同为航片质量的保证。
前期的航拍规划在整个航拍过程中都发挥着控制性作用,但在现场工作时,还需对规划内容进行适应性调整,以保证航拍工作的顺利进行。如图15为二组航线的实际分布,从中可以看出,该组完成此区域航拍共起飞27架次,与计划中日均6次、4天完成、1天补飞的情况相符。该组航线基本都为“山”字形,总长度或增或减,航程7~8 km不等,个别航线达到9 km,规划性与适应性特征显著。第15号航线形状特殊,系补飞航线。
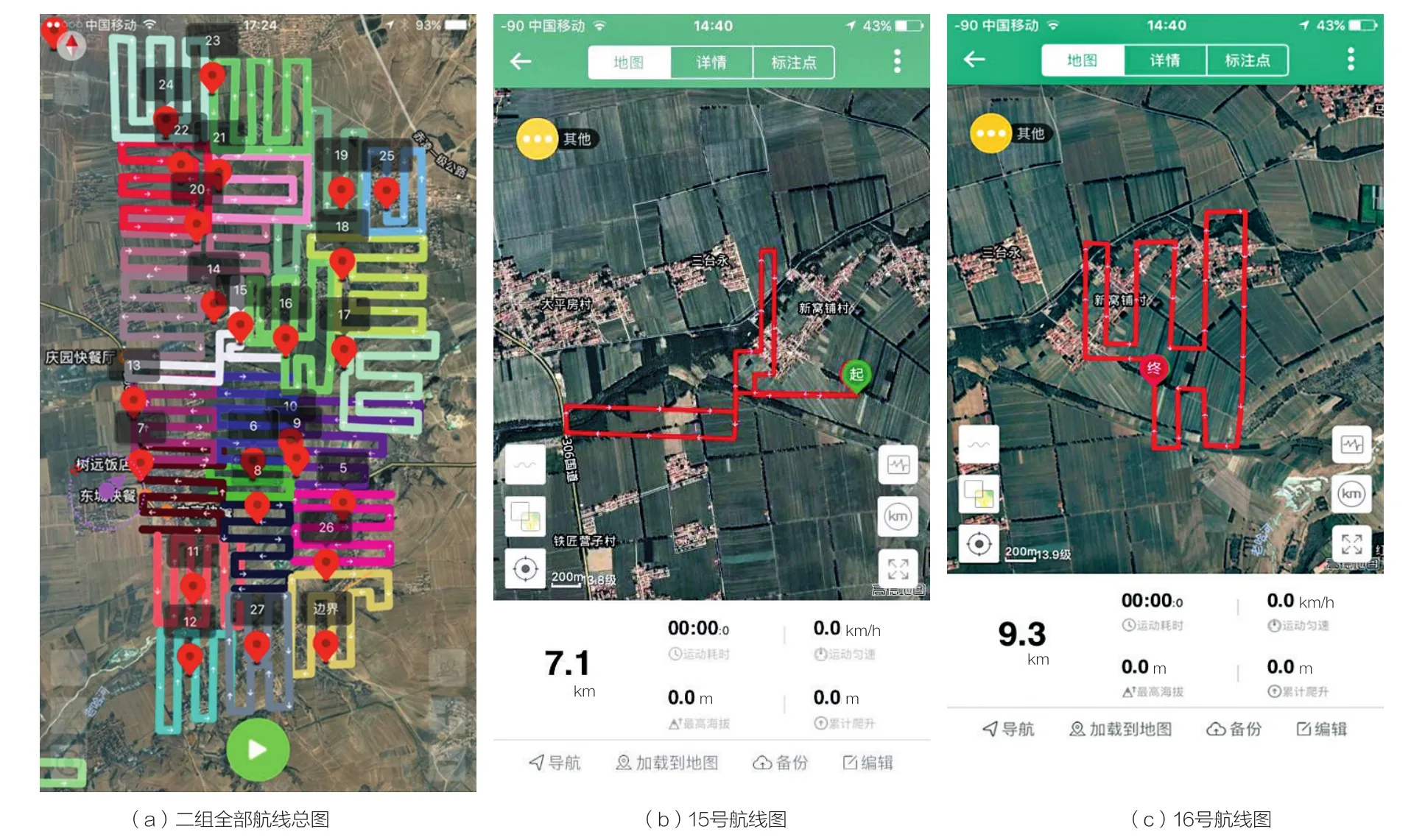
图15 二组实际航线总体与分解图(来源:作者自摄)
另外,人员配合问题在整个航拍工作中至关重要,小型低成本无人机多架次飞行必然需要更多人力的投入,工作人员操作技术越娴熟,成员间配合程度越好,则各项工作就越可以高效快速进行,从而提高现场工作的质量,减轻内业工作负担。
5 后期的室内制图
现场工作经过了补飞与拼合检验,航片的完整性与叠压率已可以保证,在计算机性能足够的情况下,将所有航片导入Agisoft Photoscan便可进行统一运算。Photoscan根据航片的GPS信息可自动生成正射影像,导入RTK数据还可进一步校正。经过这些处理,便可导出整个航拍区的正射影像(图16),将正射影像图按照1∶1的比例导入Auto CAD中,便可进行地形图绘制。放大航片,观察某两小航片相交处,可见清晰度良好,并未出现航片边缘地带常见的变形、错位等问题,说明了此前总结的工作方法行之有效,验证了利用小型低成本无人机可以实现大范围、高精度的航拍目标。
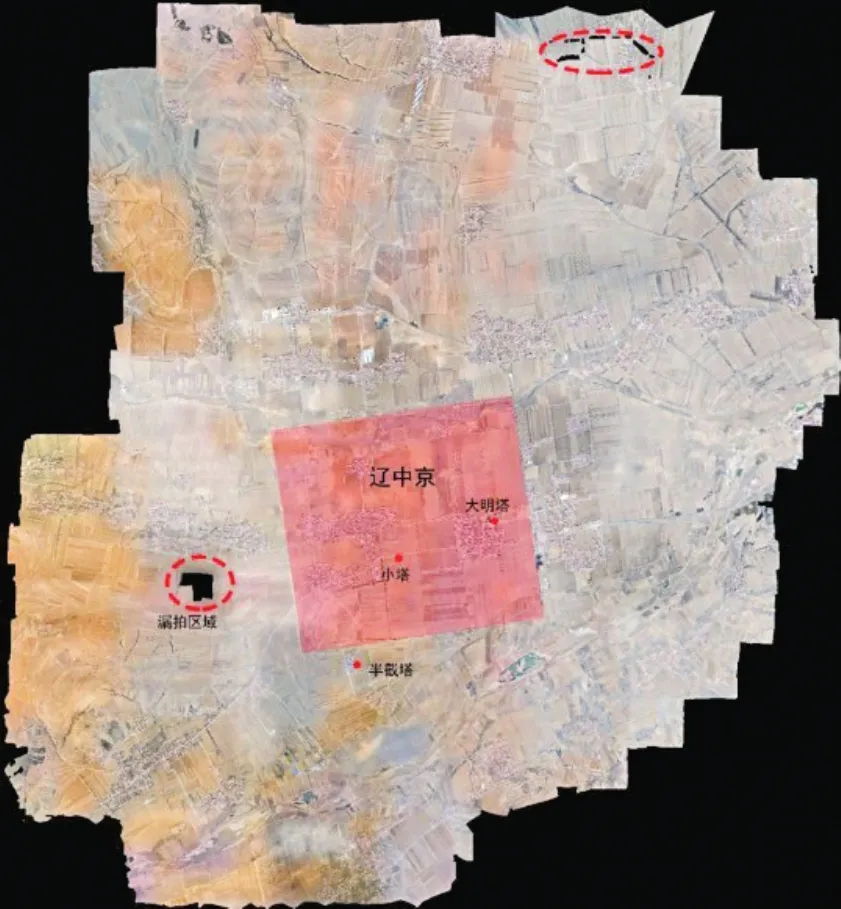
图16 大航片及局部拼合示意图(来源:作者自摄)
6 结束语
通过本文的研究,主要获得以下几点认识:①小型低成本无人机可以广泛应用于各种尺度的考古遗址、文物建筑的测绘之中;②使用消费级的小型低成本无人机进行航空测绘时,应根据航测面积和精度需要,确定飞行高度,飞行高度和正投有效范围边长的关系可以1∶1估算;③通过实践,本文归纳了小型低成本无人机进行大遗址航测时的飞行路线控制方法和无人机操作流程;④通过实践,本文总结了航片的拼合方法,实现了不同型号不同架次无人机同时与分时测绘成果间以小聚大的拼合效果。
此次航拍工作完成了既定目标,为辽中京遗址保护规划提供了重要资料。本文所总结的小型低成本无人机在大遗址航测中的应用方法,有助于降低航测成本;有助于普及大遗址航测,实现大遗址的无人机日常监测;有助于大遗址的综合信息记录和日常保护监测等工作。
(注:本文依据北京大学考古文博学院文物建筑专业2014级本科生辽中京航测实习成果撰写。感谢宁城县文物局、辽中京历史博物馆对本次工作的帮助与支持。参与实习和航测、制图学生有本科生12人:郭勉、黄楚君、邱琼仪、施一泓、席雅卿、马力、王藏博、杨佳帆、马青龙、黄鑫、马思蒙、李芃芃;研究生6人:黄青岩、王一臻、李松阳、季宇、罗登科、陈彦运;指导教师:徐怡涛;助教:尚劲宇。北京大学考古文博学院张剑葳助理教授为本文提供了指导和修改意见。)
猜你喜欢
英语世界(2022年9期)2022-10-18
汉语世界(2022年5期)2022-10-15
辽金历史与考古(2021年0期)2021-07-29
小哥白尼(神奇星球)(2021年12期)2021-03-08
时代邮刊·下半月(2020年9期)2020-09-23
金桥(2018年6期)2018-09-22
小学生优秀作文(低年级)(2018年6期)2018-05-19
陕西画报(2017年1期)2017-02-11
太空探索(2016年5期)2016-07-12
太空探索(2016年6期)2016-07-10
