
基于无人机大样方草地植被覆盖度及生物量估算方法研究
2018-12-05 06:47刘艳慧蔡宗磊包妮沙刘善军
生态环境学报 2018年11期
刘艳慧,蔡宗磊,包妮沙*,刘善军
1. 东北大学测绘遥感与数字矿山研究所,辽宁 沈阳 110819;2. 吉林省水利水电勘测设计研究院,吉林 长春 130012
植被覆盖度(fractional vegetation cover,FVC)是植被在地面的垂直投影面积占研究区总面积的百分比(梁顺林等,2013),可以表示植被的茂密程度及植物进行光合作用面积的大小(路广等,2017),是表征陆地植被质量和具有一定密度的多种植物生长动态的重要参数(佟斯琴等,2016),也是气象数值模型、水文生态模型的重要因子(赵艳华等,2017)。草地生物量指的是在一定的气候条件下,草地植被进行光合作用的产物(付刚等,2011),生物量可以评价草原生态系统生产力,评估草原长势及产量(周宇庭等,2013)。植被覆盖度是估算生物量的重要指标(赵英时,2013)。因此监测草地植被覆盖度及生物量对于揭露某一区域草地植被的分布状况及空间变化规律、探讨变化的驱动因子具有重要意义,并可为以草定畜提供科学依据,有利于维护草地生态系统的稳定。
中国北方草地类型有草甸草原、典型草原、荒漠草原等(中华人民共和国农业部畜牧兽医司主编等,1996),草地生物量受气候因素、放牧、开垦、采矿等多种因素共同影响(席小康等,2017),因此,监测北方草地生物量可以评价草地生态系统获取能量的能力与生产力,对保护草地资源及提高草地产量具有科学的指导意义。
遥感技术可以获取大范围内的数据,能够进行周期性观测,并且由于其空间分辨率、光谱分辨率及其时相特征的多样性等优势,已经成为监测区域乃至全球植被覆盖度的主要方法。然而,在植被覆盖度遥感估算方法中,回归模型法、分类决策树法、人工神经网络法等不仅在建立模型时需要地面实测植被覆盖度,而且也需要地面实测数据进一步验证模型的准确性,而植被指数法、像元分解模型法仅需要地面实测数据进一步验证(贾坤等,2013)。目前,随着数字摄影技术的快速发展,将数码相机与数字图像处理技术结合的照相法因具有效率高、速度快、价格便宜、高质量等优势,已被广泛用于估算地面植被覆盖度,并日趋成熟,照相法不仅促进了地面测量植被覆盖度的发展,而且已经成为应用遥感技术在大区域内监测植被覆盖度的可靠辅助手段和验证方法(Zhang et al.,2018)。利用照相法获取地面数据时,必须保障相机与地面保持一定高度水平垂直拍摄,一般手持相机拍摄高度不够,但利用长杆挑起相机拍摄又不能保持相机的稳定性,故目前地面照相法获取的样方大小基本在 1 m×1 m 左右,无法与遥感数据的空间分辨率相匹配,影响遥感技术估算植被覆盖度的精度。
无人机遥感平台(UAV remote sensing system,UACSS)是通过使用飞行高度在几千米之内的UAV,搭载各种成像或非成像传感器获得航空遥感数据、视频数据等的无人航空遥感与摄影测量系统(李德仁等,2014)。它可以在云下飞行,灵活性高、速度快,能够获取多尺度、高分辨率航拍影像,可以突破有人航空遥感天气因素、环境因素、航行时间等限制,又可以弥补卫星光学遥感由于时间分辨率与天气等因素的影响而无法获取遥感数据的不足,还能克服地面遥感范围小、费时费力的缺点(Anguiano-Morales et al.,2018)。与之前只利用光学卫星遥感数据作为数据源监测植被覆盖度相比,把无人机遥感平台与光学卫星遥感技术结合起来具有明显的优势(Senthilnath et al.,2017)。Torres-Sánchez et al.(2014)研究了无人机在30 m与60 m飞行高度时,基于归一化绿红差值指数、过绿指数、颜色指数、vegetativen指数、过绿红差值指数、Woebbecke指数对麦田植被覆盖度多时相映射进行了计算,其中以过绿指数估算精度最高(飞行高度30 m时,精度范围是87.73%~99%;飞行高度60 m时,精度范围83.74%~87.82%)。宋清洁等(2017)以甘南州为研究区,基于小型无人机与MODIS植被指数产品,对增强型植被指数与归一化植被指数和植被覆盖度的关系进行分析,结果表明基于小型无人机获取的大样方数据与增强型植被指数估算草地植被覆盖度的模型具有更高的精度(88.00%)。周在明等(2017a)以 SPOT6卫星为数据源利用像元二分模型估算宁德三沙湾滩涂湿地植被覆盖度,并以同期获得的无人机数据进行验证,结果表明均方根误差为 0.117,判定系数R2为0.918。因此,无人机可以为遥感估算植被覆盖度提供大样方数据,提高植被覆盖度估算模型的精度及模型验证的准确性,进而通过植被覆盖度估测草地地上生物量。
本文以内蒙古呼伦贝尔典型草甸草原为研究区,开展基于无人机大样方草地植被覆盖度及生物量估算,研究目的在于:
(1)通过无人机获取大样方航拍影像数据,利用开关中值滤波及基于维纳滤波的小波变换对无人机数据进行去噪处理,并用直方图均衡化进行图像增强等预处理,计算过绿指数与颜色指数,选择基于遗传算法的最大熵法对图像中植被与背景进行分割,从而估算植被覆盖度;
(2)结合地面数码相机获取大样方周围布设的小样方,进一步验证基于无人机大样方快速估算草地植被覆盖度的可行性及适用性;
(3)利用数码相机估算的植被覆盖度与生物量进行相关性分析。
本研究可为下一步应用无人机遥感平台与光学卫星遥感技术结合起来估算呼伦贝尔草地植被覆盖度奠定基础,同时可为大区域利用地面数据与遥感技术监测草地的生物量及生长状况提供科学依据。
1 研究区概况及数据源
1.1 研究区概况
研究区位于内蒙古呼伦贝尔草原中部(图1),气候类型属于干旱半干旱气候,降水量主要集中在7月、8月。草地类型为草甸草原,草地利用方式主要包括围栏草场、放牧草场、及退化封育草场等,草地植物群落组成主要有星毛委陵菜(Potentilla acaulis)、铁杆蒿(Artemisia gmelinii)、黄花蒿(Artemisia annua)、黄芥(Brassica juncea)、羊草(Leymus chinensis)、针茅(Stipa capillata)等,植被覆盖度较高。由于受到开垦、放牧及矿区开采等人类活动的影响,研究区内已经出现了部分草地退化及沙化。
1.2 样地的布设
于2016年7月12日—14日对研究区进行了地面采样及观测实验,样方根据地表草地植物群落组成、放牧情况、退化情况以及地形条件采用分区随机采样法,样方的位置选择在其周围一定区域内,草地生长比较均匀,并且植被景观具有一致性。采样点的位置如图1所示。样地的布设情况如图2所示,其中无人机样方大小设置为60 m×60 m,大疆Phantom 3 Professiona无人机(参数见表1)飞行在样方上方100 m左右,获取无人机航拍遥感数据。同时在无人机大样方周围布设9个1 m×1 m小样方,利用索尼SELP 1650数码相机在其上方1 m处垂直拍摄获取数据。利用GPS记录每个样方的地理坐标,同时记录样方内的植物群落类型、地貌环境(表2),并将1 m×1 m小样方内的植被全部齐地面收割,去除碎石等杂物,装入袋子做好标记,最后共获取7个大样方,63个小样方。将装入植被的袋子带回实验室,在 80 ℃下烘干至恒重,然后用精度为0.01的电子天平称重,得到单位面积内的有机物质总量,即生物量。
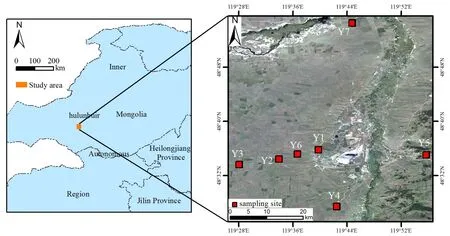
图1 研究区及采样点位置Fig. 1 Location of research area and sampling
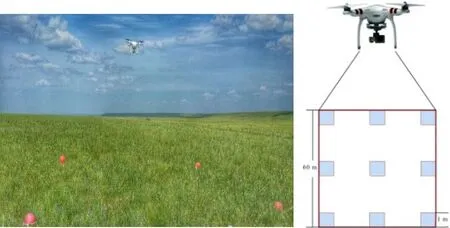
图2 样方布设示意图Fig. 2 Sketch map of sample plot
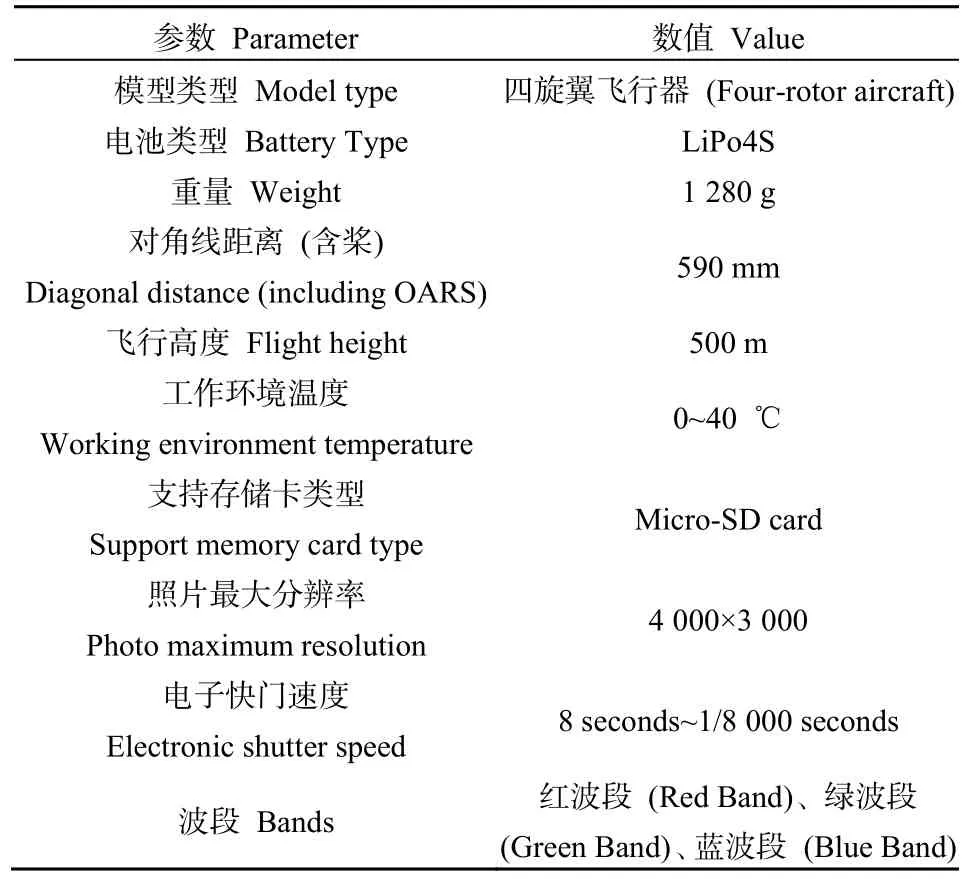
表1 大疆Phantom 3 Professiona无人机参数Table 1 Parameters of DJ Phantom 3 Professiona
2 方法
2.1 无人机数据预处理
2.1.1 无人机图像去噪
由于受样地环境及无人机自身通信的影响,无人机在对样地进行航拍和图像传输过程中,会受到脉冲噪声与高斯噪声的干扰,直方图中存在尖峰,并且在灰度值为0与255的位置均有噪声的影响,会影响植被覆盖度提取的精度,故在植被覆盖度提取之前,需对图像进行去噪处理。若单纯采用一种去噪方法,并不能完全消除噪声的影响,基于这种情况,本文采用开关中值滤波消除脉冲噪声,采用基于维纳滤波的小波变换对剩下的高斯噪声予以消除。
开关中值滤波的具体检测方法如下(丁继生等,2016):G(i, j)表示无人机图像中的灰度值,Max与Min分别表示无人机图像中的像素灰度值最大值与最小值,利用M模板滑动覆盖,其中M模板的大小为3×3的窗口,中心像素灰度值记为H(i,j),则 M 模板覆盖的像素灰度值集合为 HM(i,j)={H(i+m, j+n)|m, n=-1, 0, 1},如果H(i, j)等于0或255,则记录H(i, j)为噪声点。
小波变换图像去噪使用的是小区域的波,其波形长度有限,并且平均值为零。当对消除脉冲噪声后的无人机图像使用一级小波分解后,会得到4个子频带,分别为低频分量LL、垂直方向LH、水平方向HL和对角线方向HH,其中LL最为接近分解前的图像,保留了大量原始信息,具有较好的信息鲁棒性,LH、HL、HH 3个中高频分量主要是图像的纹理与边缘信息,信息稳定性较差(张超等,2017)。维纳滤波是经典的消除高斯白噪声的方法,它是以最小均方误差为准则,对图像中的高斯白噪声具有非常有效的去噪效果(张小波,2014)。
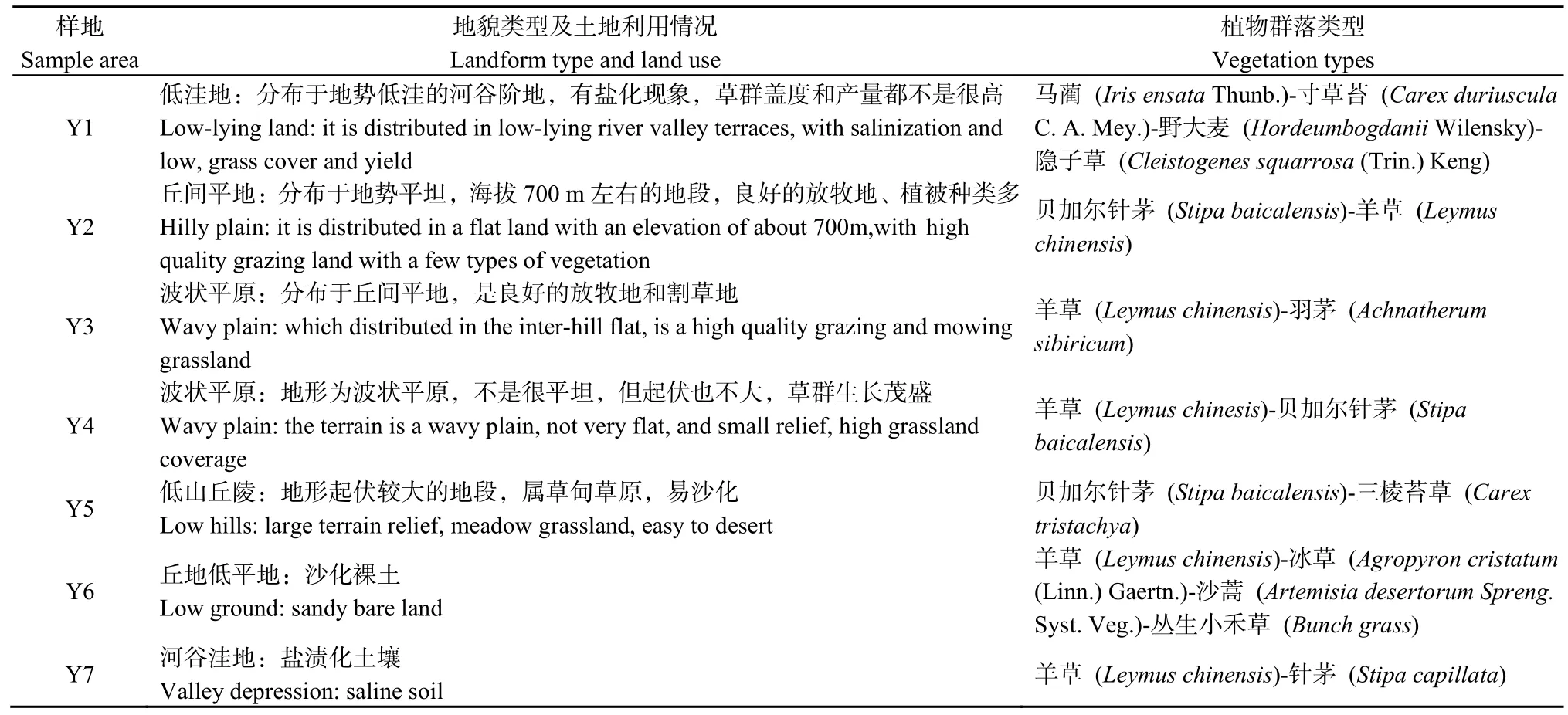
表2 样地内地貌及植被类型Table 2 Landscapes and vegetation types in the sample plot
基于维纳滤波的小波变换去噪步骤(图3)如下:
(1)对去除脉冲噪声的无人机图像使用一级小波分解,分别得到LL、LH、HL、HH;
(2)由于LL中保留了大部分原始信息,故不作去噪处理,利用维纳滤波器对 LH、HL、HH进行去噪处理;
(3)对LL、LH、HL、HH进行小波重构,得到去噪后的图像。
2.1.2 无人机图像增强
本文采用直方图均衡化对无人机图像进行增强,突出草地植被信息,抑制土壤背景信息。
直方图均衡化是图像增强中应用广泛的方法,它的基本思想是将原始图像中的灰度直方图经变换成为均匀分布的形式,变换后的图像灰度级出现的概率大致一样,实现图像对比度的增强(李锦等,2014)。直方图均衡化是以图像各灰度级概率的累积分布函数作为变换函数,经过变换后,得到灰度概率密度均匀分布的图像,累积分布函数可表示为(李锦等,2014):
式中,rj为变换前的归一化灰度级;T(rk)为变换函数;Sk为变换后的归一化灰度级;nj为原图像中出现第k级灰度级的像素个数;n为图像中像素的总数;pr(rj)为变换前图像取第k级灰度值的概率。
2.2 基于最大熵-遗传算法提取植被覆盖度
最大熵法通过建立植被与背景的目标函数,将图像分割转化为数学优化,进而利用遗传算法寻找最优分割阈值。基于遗传算法的最大熵法提取植被覆盖度的流程如图4所示。
主要步骤如下:
(1)计算植被指数:由于无人机获取的数据只有红、绿、蓝3种波段,植被与背景(裸土、阴影、砂石等)颜色差异的计算选择常用的过绿指数与颜色指数,并进行修正。
过绿植被指数(Woebbecke et al.,1995)(Excess green index,Ieg)计算公式:

图3 基于维纳滤波的小波变换去噪流程Fig. 3 Flow chart of wavelet transform based on wiener filtering
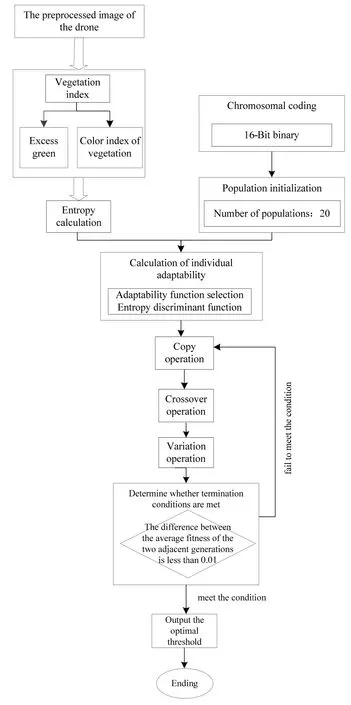
图4 最大熵结合遗传算法估算植被覆盖度流程图Fig. 4 Flow chart of estimating vegetation coverage based on maximum entropy and genetic algorithm
当 g>r且 g>b时:

否则Ieg=0。
颜色植被指数(Color index of vegetation, ICV)计算公式:
当 g>r且 g>b时:

否则ICV=0。
式中,r、g、b分别为无人机航拍图像中的红波段、绿绿波段、蓝波段。
(2)熵的计算:依据最大熵算法原理(陈露晨等,2012),熵的判别函数计算如下:
植被指数图像中灰度值的集合为{0, 1, 2,···,255},共有N个像素,灰度值为i的像素个数用φ(i)表示,概率用p(i)表示,即:

对无人机图像构建的植被指数进行图像分割时,由于裸土受湿度的影响,存在红波段与蓝波段大于绿波段的情况,因此本文图像分割类别分为植被、背景、受裸土影响误分的植被三类,即{C1, C2,C3},每个类别对应的灰度值为{0, 1, ···, G1},{G1+1,G1+2, ···G2}···{G2+1, G2+2, ···255},则阈值有 2 个,即{T1, T2}。
每个类别对应的灰度值概率为:
其中 Pk=Σi∈Ckpi, k=1, 2···, 3。
因而,各类别的熵为:
定义熵的判别函数为:

当目标与背景的信息量最大时,即可得到熵的判别函数最大时的分割阈值,即:

(3)编码:无人机图像计算的植被指数的灰度值在0~255之间,同时又使用两个阈值对图像进行分割,所以用16位二进制进行编码。
(4)设置初始种群:种群的数量设置为20,繁殖代数为100。
(5)设计适应度函数:适应度函数选择的是熵的判别函数,通过产生随机数作为初始分割阈值,计算各个个体的适应度。
(6)复制:复制操作采用轮盘赌法,将上一代适应度高的个体的染色体通过复制操作遗传到下一代。
(7)交叉:交叉概率设置为 0.6,交叉操作使用的是双点交叉。交叉操作将产生适应度更强的个体,可以加快全局的寻优。
(8)变异:变异概率取0.03,防止种群在一开始取得最优分割阈值而停止进化。
(9)终止条件:当相邻两代平均适应度的差值小于0.01时,进化趋于稳定,或达到最大迭代次数时进化完成。
2.3 草地地上生物量估算方法
3 结果与分析
3.1 无人机数据预处理结果
以Y5为例,利用开关中值滤波与基于维纳滤波的小波变换对无人机图像进行图像去噪,去噪后的图像直方图如图5所示。结果显示,无人机图像经过去噪后,直方图较为平滑,并且在灰度值为 0与255处没有值,消除了噪声对图像的影响。利用直方图均衡化对去噪后的无人机图像进行图像增强,增强前的直方图(图 5)与增强后的图像(图6)显示,无人机图像经过均衡化后,各灰度等级分布比较均匀,植被与土壤背景之间差别明显。
3.2 无人机植被覆盖度提取结果及验证
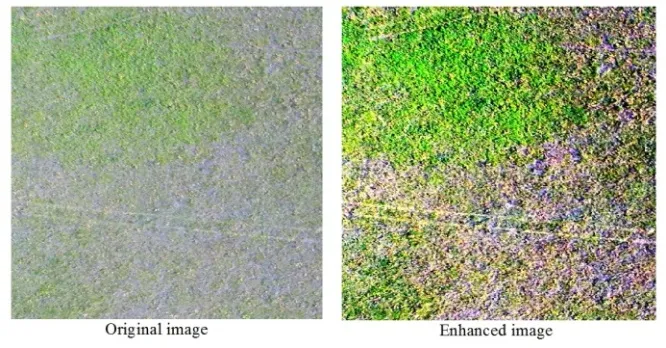
图6 无人机图像增强结果Fig. 6 UAV image enhancement
对无人机大样方数据进行预处理并计算植被指数,应用基于遗传算法的最大熵法提取植被覆盖度,结果如表3所示,两种植被指数估算的植被覆盖度、阈值1、阈值2均有一定差异,最大熵差别不大。
为了定量分析无人机大样方估算草地植被覆盖度的精度,利用手持GPS记录的控制点对无人机图像进行几何校正,并利用实地照相法获取控制点位置1 m×1 m小样方的植被覆盖度(图7),基于t检验方法,利用照相法估算的1 m×1 m小样方的植被覆盖度验证无人机影像估算结果,并计算其均方根误差。基于无人机估算植被覆盖度与照相法估算植被覆盖度t检验,结果如表4所示,无人机影像两种植被指数的估算结果与照相法估算结果不存在显著差异(P<0.05),其中以过绿指数估算结果精度较高,t检验 P值为 0.272,均方根误差为6.6356,可以利用该方法估算无人机大样方草地植被覆盖度。7个样地中,两种植被指数均以 Y6样地的精度最高,Y2的精度最低。其中,Y6样地为丘地低平地,沙化裸土,植被类型少,植被覆盖较低,而Y2为丘间平地,植被种类多,覆盖较高,空间异质性较强,故Y2样地的估算精度低于其他样地(表5)。
3.3 植被覆盖度与生物量的相关性分析
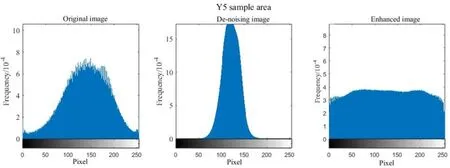
图5 无人机图像预处理直方图Fig. 5 Histogram of preprocessed UAV image
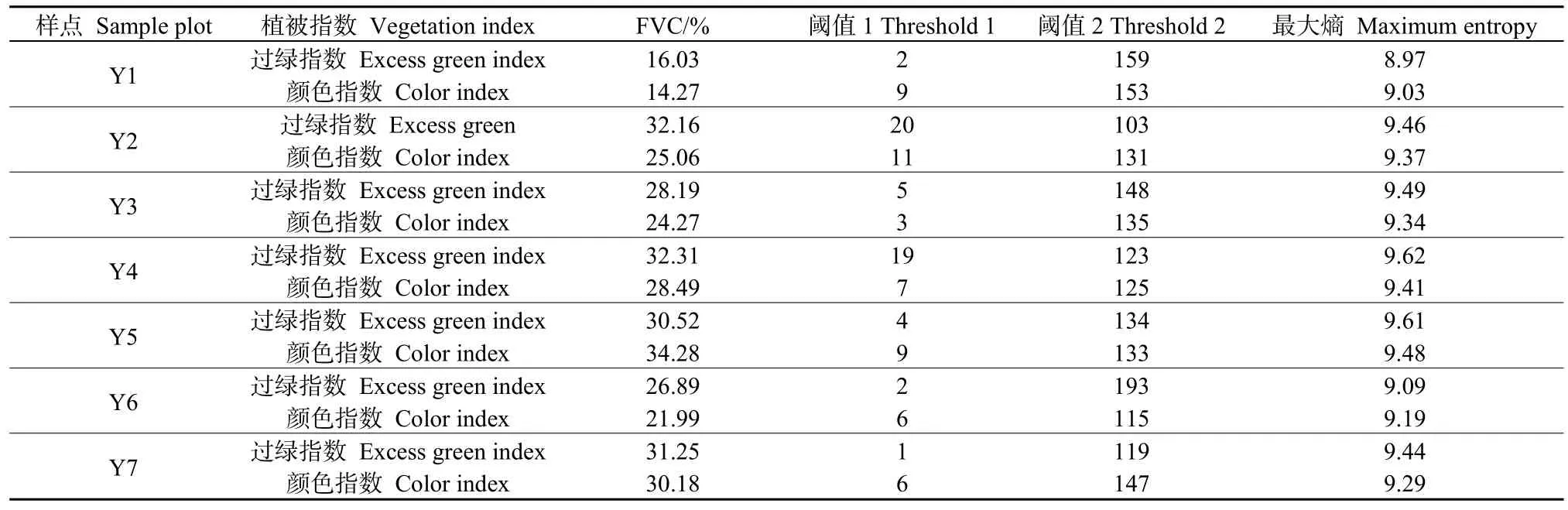
表3 植被覆盖度估算结果Table 3 Result of estimating vegetation coverage
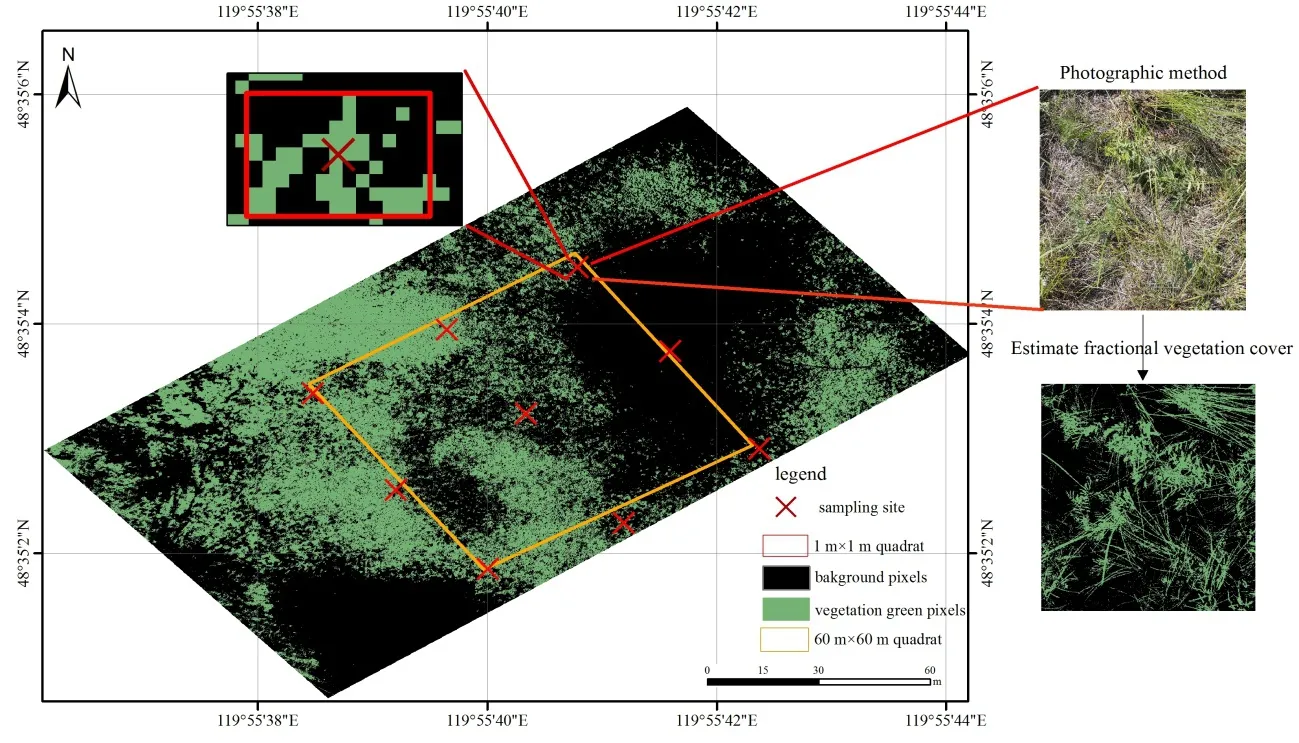
图7 无人机大样方验证示意图Fig. 7 Verification sketch map of large quadrat

表4 无人机估算植被覆盖度的精度Table 4 Precision of estimating vegetation coverage by UAV image
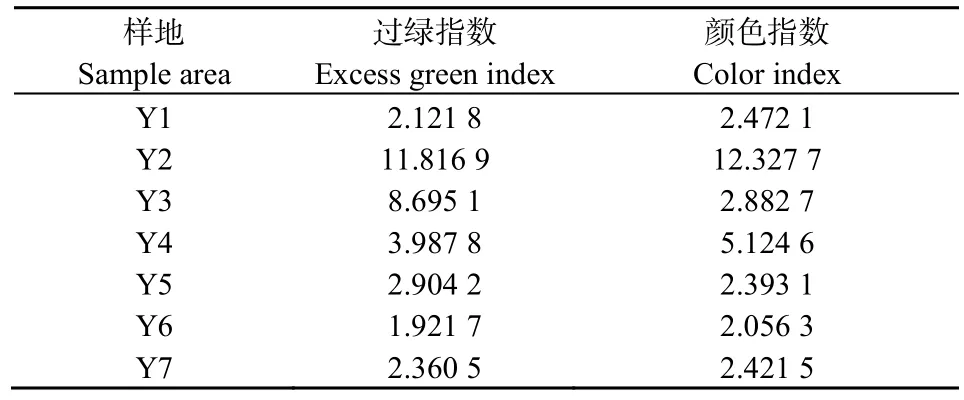
表5 各样地无人机数据估算结果均方根误差Table 5 RMSE of estimating vegetation coverage by UAV imagery form various sampling plot
由于生物量与植被覆盖度(P)、植被株高(h)及植被覆盖度与株高的乘积(P×h)密切相关(Wen et al.,2017),本文对草地生物量与3个变量之间的相关性进行了分析,结果如表6所示,生物量与3个变量之间具有显著的相关性,相关系数均在0.8以上,其中生物量和植被覆盖度与株高的乘积相关性最高,为0.9134。

表6 草地生物量与各变量相关系数Table 6 Correlation coefficient of grassland biomass with each variable
利用 y=a+bx,y=axb,y=ax2+bx+c,y=ax3+bx2+cx+d,y=a+blgx等回归模型,以生物量与单一变量P、h,交叉变量P×h及联合变量P、h 4种情况进行回归方程建模,计算均方根误差与估算精度对各模型进行精度分析。
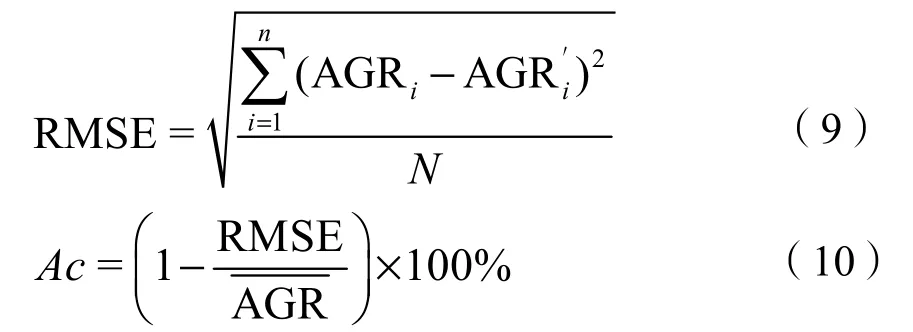
式中,RMSE为均方根误差;AGRi为实测草地生物量;AGRi′为估算草地生物量;N为样本数;Ac代表估算精度;AGR 代表实测草地生物量的平均值。
拟合结果及精度如表7所示,结合图8可知,单一变量中,生物量与变量P以及生物量与变量h的拟合效果最优的均为三次回归模型,其中变量P三次拟合效果(R2为 0.8244,RMSE为 3.5008 g·m-2,估算精度为 78.80%)优于变量 h三次拟合(R2为 0.7460,RMSE 为 3.6213 g·m-2,估 算精度为76.42%);交叉变量P×h、联合变量P和h建模效果均优于单一变量建模精度,对于联合变量P和h,一次拟合效果(R2为0.8326,RMSE为2.6119 g·m-2,估算精度为 82.26%)优于单一变量的最优拟合,交叉变量 P×h三次回归建模精度最高(R2为 0.8536,RMSE 为 2.4420 g·m-2,估算精度为83.41%)。
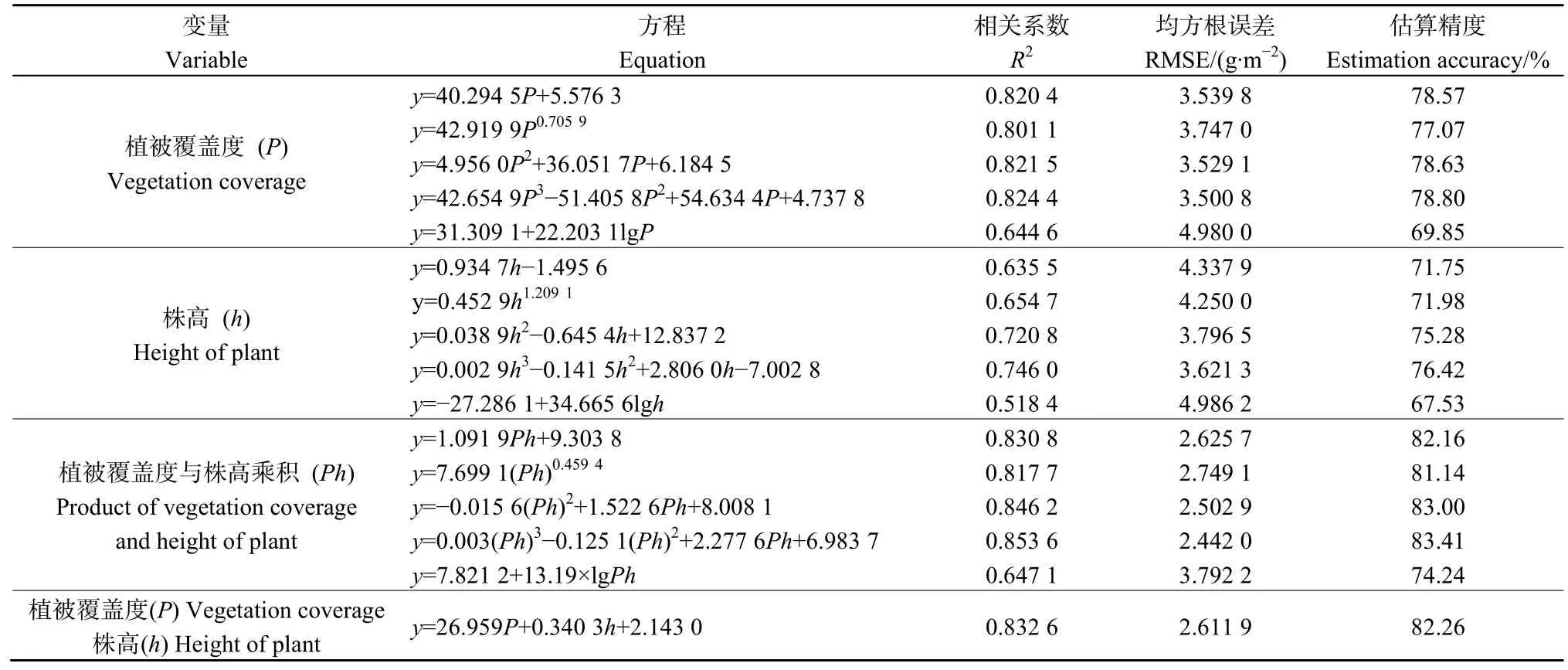
表7 草地生物量与各变量的模型及精度Table 7 The model and precision of grassland biomass and every variable
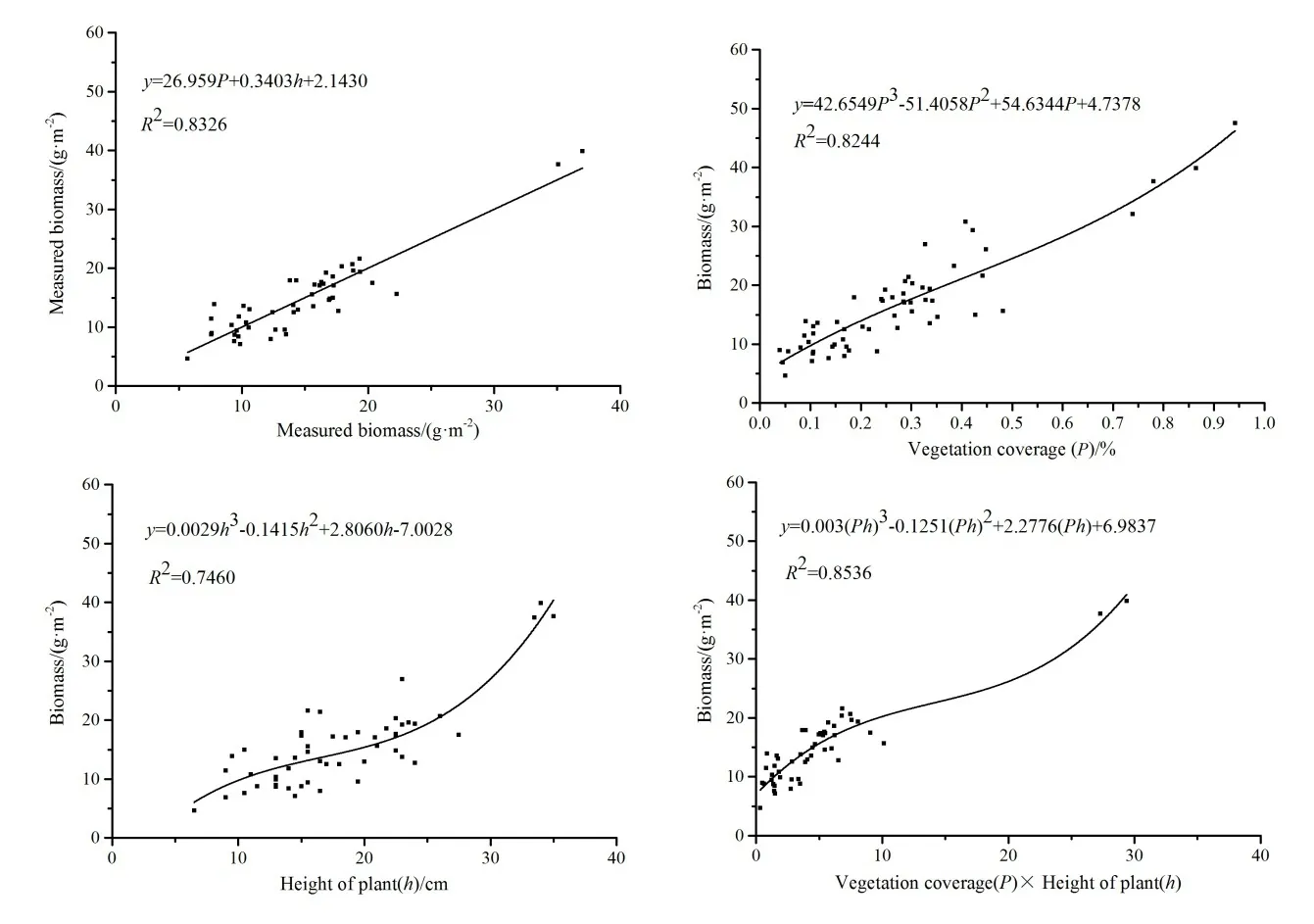
图8 草地生物量与各变量的拟合结果Fig. 8 Fitting result of grassland biomass and every variable
4 讨论与结论
4.1 讨论
无人机遥感作为卫星遥感的有益补充,具有高时效、高分辨率、低成本、低损耗、低风险及可重复等优点,尤其在小尺度区域进行地表植被估测效果显著,周在明等(2017b)以低空无人机影像对三沙湾滩涂湿地入侵种互花米草进行了覆盖度研究,得出植被覆盖度的估算值与真实值之间的均方根误差(RMSE)为0.06,决定系数R2为0.92的高精度结果。牛亚晓等(2018)证明基于无人机多光谱遥感技术及植被指数法可以较好地提取冬小麦越冬期、拔节期、挑旗期和抽穗期的植被覆盖度信息。本文利用无人机获取呼伦贝尔草甸草原 60 m×60 m大样方数据,实现草地植被覆盖度较高精度估算(t检验P值为0.272,均方根误差为6.6356)。
利用无人机图像进行植被覆盖度提取时,由于每个草地样方内植被物种、地貌类型均有所差异,为了保证及提高每个样地无人机图像提取的植被覆盖度精度,基于遗传算法,根据最大熵原理,建立植被覆盖度与土壤背景的目标函数,通过获取每一幅无人机图像的动态双阈值,实现植被与土壤背景的最佳分割。阈值法是图像分割的常用方法,通过建立最大熵双阈值数学模型和设计遗传算法,可有效解决双阈值图像分割,优化分割结果,最大熵遗传算法在医学CT脑颅图像、人物图像及山水图像的分割中,均实现了最佳分割(王文渊等,2011;蔡军杰等,2016)。
本文分别作生物量与植被覆盖度(P)、植被株高(h)及P×h相关性的分析,得出生物量与3个变量之间具有显著的相关性,相关系数均在0.8以上。利用植被覆盖度及株高建模估测生物量时,发现生物量不仅与P、h的单一变量显著相关,还与两者的交叉(Ph乘积)及联合变量(P×h)密切相关。交叉变量建模精度最高,P与h联合变量的一次拟合建模结果高于任意单一变量建模结果。赵成义等(2004)在估测琵琶柴(Reaumuria songonica)灌丛生物量时也发现植株冠幅长与宽所建拟合方程精度最高,相对误差在4.79%~10.12%之间。刘陟等(2014)利用多个变量,包括株高(h)、冠幅面积(C)、株高与冠幅面积乘积(h×C)参数估算油蒿(Artemisia ordosica)生物量,发现交叉变量估测效果优于冠幅面积的单一变量拟合。马媛等(2017)证明黄柳(Salix gordejevii)灌木生物量最优模型为株高和基径的乘积的三次回归模型,经验证模型的预测值与实测值拟合率在72.08%~88.72%,其预测效果较好。
4.2 结论
本文利用无人机获取呼伦贝尔草甸草原 60 m×60 m大样方数据,对无人机图像进行处理、分析及验证,估测样方内植被覆盖度及草地生物量,得出以下结论:
(1)利用遗传算法对植被与背景最大熵目标函数进行优化,获取每个样地图像中植被与背景的动态分割阈值,从而得出其植被覆盖度,结合野外同步实地数据,通过t检验及均方根误差验证其精度,结果表明,该方法估算估测精度较高(t检验P值为0.272,均方根误差为6.6356)。
(2)草地生物量和植被覆盖度、植被株高及草地植被覆盖度与株高的乘积3个变量的相关性均较高,其中生物量和植被覆盖度与株高的乘积相关性最高,为0.9134。构建的交叉变量的三次回归拟合效果(R2为 0.8536,RMSE为 2.4420,估算精度为83.41%)高于单一变量。
猜你喜欢
科学技术创新(2022年30期)2022-10-21
农业与技术(2021年23期)2021-12-14
黑龙江水利科技(2020年8期)2021-01-21
今日农业(2020年19期)2020-12-14
原子与分子物理学报(2020年5期)2020-03-17
农业机械学报(2019年6期)2019-06-27
水土保持研究(2018年5期)2018-10-12
中国农业信息(2018年2期)2018-07-28
中国科技信息(2015年2期)2015-11-16
西藏科技(2015年1期)2015-09-26
