具有先应性最优通道传输的车载网络研究分析
2018-12-04 02:13范怡敏罗云飞沈克永
计算机工程与应用 2018年23期
范怡敏,罗云飞,沈克永
1.南昌理工学院 计算机信息工程学院,南昌 330044
2.华为技术有限公司,广东 深圳 518129
1 引言
车载网络作为当前智能交通系统的重要成员,通过车与其他单元间相互交流信息,为高效、舒适、安全驾驶提供了有力保障。面对复杂的驾驶环境,对道路安全等问题,对车辆自组织网络中数据传输的效率以及准确性要求更加严格。特别是当发生车祸或严重堵车时,大量车载节点频繁接入协议固定分配的信道时,严重增加了数据传输中分组丢失率和效率,这成为当前亟待解决的热点问题之一[1-2]。
认知无线电(Cognitive Radio,CR)是解决无线电频谱利用率不足问题的关键机制。CR可确保有效使用可用的无线电频谱,而不要求新频段的分配。其动态和智能的自动选择传输参数和接入技术,可最大化信道利用率。目前已有和即将推出的车辆预计都将在车辆行驶过程中,提供车载内部命令传输和无线服务动态接入功能[3-4]。CR作为一个频谱资源再利用的核心技术[5],包括三个组件:(1)频谱感知:要求次级用户(Secondary User,SU)在作用距离内感知和检测无线电频谱环境,以检测未被主用户(Primary User,PU)占用的无线电频段;(2)动态频谱管理:要求CR网络动态进行信道分配,以选择通信的最佳可用频段;(3)自适应通信:CR设备能够配置自身的传输参数,以伺机充分利用不断变化的频谱空洞。
通常,一个具有CR能力的移动终端或车载节点,能够感知通信环境,根据用户的喜好和需求从操作环境中分析和学习信息,并对操作参数进行重新配置,以符合系统规则。虽然CR问题在协议栈的所有层中都有出现,但关键问题都局限于物理层和媒体访问控制(Media Access Control,MAC)层,因为在无线信道上进行通信的控制和协调都发生在MAC层。文献[6]是一种抢占式的MAC方法,目的是降低端到端的延迟。其主要利用MAC层的感知刺激建立频谱机会图,然后确定最佳的感知时间和传输时间,协调与其他用户的频谱接入。文献[7]在车载网络中,以干扰概率作为约束条件,利用感知时间的访问策略和穷举搜索,以完全跨层设计为目标,共同优化频谱感知参数和访问参数。文献[8]在异构信道可用的情况下,研究局部感知可用,对具有较高可用性的信道进行感知的统计感知策略可能会提高通信性能。然而,文献[8]并没有指出需要找到一个有效智能的机制,以感知和分配PU未占用的射频信道,以有效部署有利于SU的CR网络。
虽然认知无线电已被成功应用于车载网络,且不用分配专用频率。但建立有效感知和智能数据传输依然十分困难。本文主要通过一个集成的MAC协议(Integrated MAC,IMAC)解决频谱感知和动态频谱管理问题。IMAC包含基于模型预测控制(Model Predictive Control,MPC)部分,可对分配给PU信道的未来状态进行预测。IMAC则使用该预测执行频谱感知和动态频谱管理。
2 预测控制模型
MAC协议可以被映射到一个包括动态变化约束的多变量优化问题。但需要SU进行数据传输最优信道时必须具有先应性。基于模型预测控制(Model Predictive Control,MPC)系统[9]是解决该类问题的最好方法之一,因为MPC可以提前几个时间间隔预测变量数值,防止相邻时间间隔的变量预测值出现急剧的增加或下降,并可以处理随时间变化的多约束多变量的优化问题。MPC最初设计目的就是解决该过程,并以滚动优化的方式解决一系列最优控制问题[10]。其主要优势是以一种系统化的方式处理输入和状态约束问题。
通常,MPC预测模型包括以下2个问题:(1)需要对变量的值进行预测;(2)需要通过预测计算使变量有界。基于MPC系统的典型例子如图1所示,其中模块A决定约束变量的上下界;模块B预测受模块A支配约束;模块D基于预测做出决策,并在系统上执行该决策,由此可以测量约束变量的实际数值;模块C对比模块D和模块E的输出,并在出现误差的情况下,将其反馈到模块A和模块B。因此,MPC系统是一个具有反馈功能的控制系统。

图1 MPC框架
3 提出的框架设计
3.1 提出框架的主要特点
提出框架设计的主要特征如下:
(1)将CR车载网络映射到一个闭环系统,其将信道分配问题转化为一个可满足性问题。
(2)使用MPC系统,先应性地决定数据传输信道的未来状态,从而降低信道感知负担。
(3)在车载网络中选择对移动SU数据传输最优的可用信道,降低了车载SU节点的负担,在分布式CR网络和集中式CR网络中都可以进行操作。
3.2 框架使用过程
已知一个主用户信道列表和M个传输状态,通过IMAC预测未来K个时隙的PU信道传输状态。所有无线传输的时间线均被划分为相等大小的信标间隔或时隙[11]。本文首先描述如何使用该框架,预测PU在下一个即将到来时隙的信道状态,其后描述如何以相同的方式预测未来K个时隙(K>1)的PU信道状态。本文这里假定没有通用性损失,每个PU均与一个专属的信道相关联。任意一个PU信道的繁忙状态或空闲状态分别取决于相关联的PU是否正在进行数据传输。
设N个与PU相关联的信道表示为{X1, X2,…,XN}。设表示信道Xi在时隙 j的状态。在时隙t已知的情况下,与Xi相关联的历史多项式Dpi为:
本文这里使用的MPC框架如图2所示。对于所有的预测变量zi,其约束变量或目标值(NGi)的期望值极限由模块A设置。对于每个变量zi,模块B使用期望目标值(NGi)通过控制计算预测zi在MPC框架中的概率,使用数学模型(Dpi)通过以往历史数值预测zi在现实系统中的概率;模块D是现实系统,可基于预测做出决策,并执行操作。且将操作的结果反馈给模块B;模块B基于模块C输出的变量zi的预测值和现实过程中输出的zi的实际数值,计算变量zi在预测中的误差。该反馈可提高预测质量。本文将CR网络的信道分配问题映射到MPC框架上。下面将描述图2中的MPC框架的各模块。

图2 本文算法框图
值得一提,本文提出的框架在分布式CR网络和集中式CR网络中都可以进行操作。在分布式CR网络中,由基站执行图2中的模块A、D和C,并生成以后K个时隙的信道状态预测。此外基站在K个时隙中对信道进行感知以发现其状态,并使用该状态作为对模块B和A的反馈。在集中式CR网络中,由每个SU每次在K个时隙中执行图2中的模块A、B和C。在执行先应式数据传输算法前,所有的次级用户都要进行如下操作。首先所有的SU相互交换预测值;然后每个SU计算信道Xi,以及信道状态为空闲的SU数量Ji,1≤i≤N 。
3.3 模块描述
3.3.1 设定点计算
设NGi的值为1(NGi=1),反之则设TGi的值为0。0.6 M的值基于如下条件:当一个信道在近期超过60%的时间为繁忙状态,则设定该信道的状态为繁忙。式(3)很好地体现了这一点。

3.3.2 误差校正和目标计算
模块B基于从模块A、模块C和模块D得到的反馈,计算未来M个时隙的每个信道Xi的NGi值。模块A基于以往的时隙,向模块B提供每个信道Xi的NGi值。模块D给出每个信道Xi在过去时隙的实际状态。模块C给出Xi在过去的M个时隙的预测状态。对于每个信道Xi,若模块B和模块D给出的数值相同,即对上次状态的预测是正确的,那么更新后的NGi值与模块A给出的NGi值相同。若对上次状态的预测是错误的,那么更新后的T Gi值对模块A给出的NGi值进行补充。模块E将该所有信道Xi更新后的NGi值反馈送到模块C。
3.3.3 控制计算和预测
模块C是IMAC的核心模块,预测未来M个时隙的信道状态。模块C存储式(1)中描述的多项式(Dp1,Dp2,…, D pN)的集合。多项式中的值(t-M≤j≤t-1)为信道Xi(真实数值)在时隙[t-M,…,t-1]的实际状态。模块D将这些数值提供给模块B。NGi为模块B到模块C的第二个输入。模块C输出每个信道Xi在即将到来的时隙中处于状态TGi的概率。这一点由MPC控制计算实现,Dpi被作为系统模型使用,而NGi则用作设定点的目标。因此,本文将MPC框架当做黑盒使用,以计算信道状态概率。
在上述预测中,为每个有数据传输的SU选择最优信道,以确保连接稳定性和满足高速动态性。作如下操作:
首先,采集预测信道状态。
然后,在列表中排列信道,使当前时隙的所有空闲信道排列在繁忙信道的前面;在不止一个信道为空闲状态的情况下,且距离SU最远的信道给予优先排序。如果在这种情况下仍然出现了两个或两个以上的信道具有相同优先级,则随机选择一个信道给予优先级。该处理方法的理论基础为:主用户距离一个信道的距离越远,则其可能产生的干扰越小。
3.3.4 实际过程
模块D包括先应式数据接收算法[12],输出信道数据传输的真实状态,并在当前时隙将其作为反馈输入到模块A和模块B中。
上述步骤描述了使用MPC框架预测下一个即将到来的时隙的N个信道状态的方法。该方法也可以扩展到预测当前的后K个时隙的信道状态,因为MPC控制计算能够预测大量时隙的预测变量值。该计算作为一个迭代过程执行如下。
图2中,模块C首先预测在时隙t的N个信道的状态,并使用同样的方法计算在时隙t+1的信道状态预测概率。然后,在使用该概率不改变目标值,同时假定对输出的预测是正确的情况下,预测在时隙t+1的N个信道状态。将该过程重复K次,以得出在接下来连续K个时隙中N个信道的预测值。
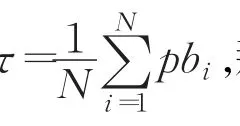
另外,数据传输的持续时间划分为相同大小的信标间隔。而且每个信标间隔被进一步分为感知、沟通和数据传输阶段(具体如图3)。由于每个SU节点都是二分之一的双工收发机,使用一个专用的全局公共控制信道(Common Control Channel,CCC)[13-14]以在发射机和接收机之间交换控制消息。因此,本文假定SU通过周期性信标间隔来同步。即:无论哪个SU节点在何时加入网络,首先必须要收听CCC上的信标间隔,并将自身与网络的其他部分同步。此外,上文所提“时隙”也就是相同的信标间隔。
图3 信标间隔的时间
4 实验结果与分析
为了体现所提车载网络的优异性,在一个标准的车载CR模拟环境中进行实验。将文献[6]和文献[7]技术视为对照组,文献[6]是一种抢占式的MAC方法,文献[7]是一种反应式信道分配方法。
二是市场自主力量相对薄弱。市场主体数量和民营经济水平对市场力量影响至关重要。2017年大连全市私营企业总数约20.5万户,个体工商户总量达到42.6万户 [5]。相比较,深圳私营企业总数超过180万户,个体工商户也超过了130万户 [6],而且深圳高科技企业80%以上是民营企业 [7],因此深圳的市场力量才能强大,市场机制才能健全。大连还需要多增加民营企业数量,多培育高科技高成长性民营龙头企业。此外,大连企业市场化自主决策能力不强。央企、国企的公司管理现代化水平不高,过度依赖领导者喜好来配置人事、生产和销售资源。民营企业也缺乏真正独立性,存在一定的政商依附关系。
4.1 实验设置
在包括10个PU和10个PU信道的模拟网络中对三个算法都进行实验,并对固定网络结构和可变网络结构都进行模拟。MPC的预测范围K设为3,M设置为8,最优感知时间为14.2 ms,一帧的持续时间为100 ms。假定存在一个全局公共控制信道,以供SU交换控制封包和状态消息。SU节点假定只通过PU信道,且不通过非授权信道传输数据。其目的是为了强调SU可以使用PU信道的限制。
4.2 评价指标
定量评价标准[15]有:信道利用率(Channel Utilization,CU)、退避率(Backoff Rate,BR)、感知延迟(Perceptual Delay,PD)。
CU表示一个信道被用于有效数据传输的时间百分比,其定义如下:

其中,tsimu表示模拟的持续时间,tbusy表示在数据传输中信道为繁忙状态的总时间。信道利用率衡量了一个MAC协议在每个无差错信道上保持相等负荷的能力。

BR衡量MAC协议作出正确预测的能力,定义如下:其中,Nretr表示在数据传输阶段SU发生退避的总次数,SUbusy表示SU在传输数据时的总持续时间。
PD是SU成功传输给定数据包之前所感知的平均信道数量,定义如下:

其中,Nfail表示成功传输数据前在信道感知阶段所感知到的信道总数量,SUpacket表示SU已传输数据包的总数量。
4.3 固定网络结构实验
本文方法、文献[6]、文献[7]在高、中和低三种信道活动中得到的信道利用率如表1与表2所示。通过观察得知信道利用率最佳的是本文方法。其原因主要是本文方法能够预测未来信道的正确状态。文献[7]信道利用率要优于文献[6],是因为文献[7]方法基于过去状态对信道进行分配,而文献[6]方法在占有信道一个时隙后,才开始进行数据传输,且信道选择也是随机的。
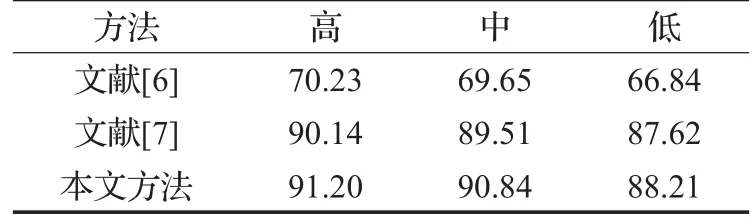
表1 集中式结构信道利用率对比%

表2 分布式结构信道利用率对比%
退避率表现了一个主用户信道的可再用性。本文方法、文献[6]和文献[7]在高、中和底的通信量环境下得到的退避率如表3和表4所示。文献[6]在忙碌的通信量配置文件中具有与本文方法相当的退避率,主要归功于在数据传输开始之前暂停一个时隙的原则。因此在第一个时隙中可能出现的退避被避免了。此外,PU信道活动在繁忙通信量配置文件中最高。与A和B相比,本文协议在退避率上分别得到了一定的改善。

表3 集中式结构退避率对比 %

表4 分布式结构退避率对比 %
感知延迟方面的对比如表5和表6所示。可以看出,与文献[6]和文献[7]相比,本文方法降低了感知延迟。

表5 集中式结构感知延迟对比ms
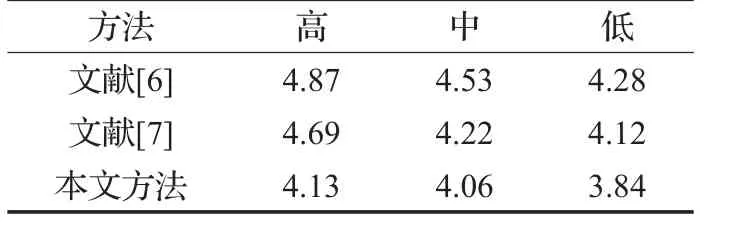
表6 分布式结构感知延迟对比ms
4.4 可变网络结构实验
在可变网络结构中,车载SU的数量从10到60逐渐增加,同时在每个间隔处记录性能指标。与在固定网络结构中的情况相似,次级用户假定为生成指数级别的随机通信量。车载次级用户以每小时10~60 km不等的速度,在一个直径为10 km的范围内移动。
不同方法在可变SU的分布式网络结构性能比较如图4所示。可以看出,信道利用率和退避率随SU数量的增加而提高。

图4 不同方法在可变次级用户的分布式网络结构性能比较
图4 (a)中,本文方法对不同数量的车载SU的曲线比较平坦。这说明本文方法的一致性,通过反馈和学习识别出竞争较少的PU信道,具有较好的稳定性。由于设计中的自适应性,本文方法能够在可变的SU中表现良好。
图4(b)中,在SU数量较少的情况下,文献[6]在平均退避时间的表现上稍优于本文方法。主要原因是其传输方式比较保守,只在信道空闲的情况下传输数据,且实际的数据传输会滞后一个时隙。因此,在当前的时隙该信道实际上是闲置的。所以,文献[6]完成任务的等待时间较长,从而避免了在该时隙发生退避的可能性。这种行为方式只有在SU数量较少的情况下才会有收益。但是,随着SU数量的增长,该行为会导致信道利用率下降。
另一个可扩展性研究是通过保持SU数量不变,提高PU信道的数量。PU信道的数量从10到60逐渐递增,并在每个间隔记录下性能指标。如图5(a)所示,本文方法的表现优于其他两个方法。但是,信道利用率随着PU信道数量的增加而降低。从图5(b)中可以看出,退避率也随着信道数量的增加而降低。其原因是随着PU信道数量的增长,对SU提供服务的PU信道数量增多。
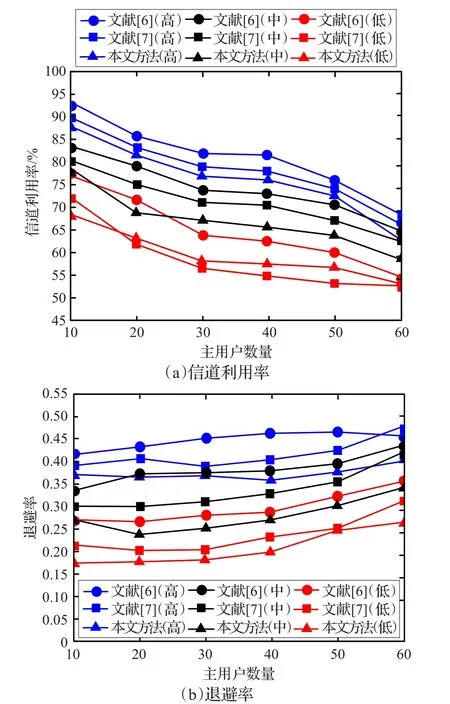
图5 不同方法在多信道的分布式网络结构中的性能比较
5 结论
本文提出的IMAC方法不仅通过对环境的有效学习提高了信道利用率,而且有助于系统在连续多个时隙的一个周期中做出更好的决策。这不仅降低了观察-判断-决策-行动的循环时间,而且优化了CR网络的整体性能。实验证明了提出方法的有效性。通过使用从MPC框架中得到的结果,降低SU节点需要感知的信道数量。以一个系统化的方式对SU节点进行信道分配以增加信道利用率。
猜你喜欢
汽车实用技术(2022年10期)2022-06-09
空间科学学报(2021年6期)2021-03-09
舰船电子对抗(2020年2期)2020-06-23
铁道通信信号(2020年8期)2020-02-06
测控技术(2018年7期)2018-12-09
铁道通信信号(2018年9期)2018-11-10
中国公共安全(2017年11期)2017-02-06
舰船电子对抗(2016年3期)2016-12-13
广西大学学报(自然科学版)(2016年5期)2016-11-12
电源技术(2015年2期)2015-08-22