
静态推靠式旋转导向钻井系统的钻压传递效率
2018-12-03 01:15:12史玉才滕志想管志川刘庆成
天然气工业 2018年11期
史玉才 滕志想 白 璟 管志川 刘庆成 王 恒
1.中国石油大学(华东)石油工程学院 2.中国石油集团川庆钻探工程有限公司钻采工程技术研究院3.航天科工惯性技术有限公司
旋转导向系统(Rotary Steerable System, RSS)能够在钻柱旋转钻进时连续和实时调控井眼轨迹,是目前最先进的定向钻井系统[1-7]。目前,中海油研究总院、中国石油集团川庆钻探工程有限公司均研制出了与Baker Hughes公司AutoTrak系统类似的静态推靠式旋转导向钻井系统(Static Push-The-Bit RSS),正全面开展现场试验及初步应用[2,8-11]。理论分析与现场实践表明[11-14],静态推靠式RSS系统正常钻进时,井底实际钻压往往小于释放大钩悬重获得的名义钻压,原因在于该系统的井下执行机构是一个特制的非旋转滑套,导向钻进时非旋转滑套上的3个导向翼肋必须全部支撑到井壁上才能给钻头施加导向力,但是非旋转滑套几乎不旋转,释放大钩悬重获得的名义钻压必须克服导向翼肋与井壁之间的摩擦力才能传递给钻头。此外,钻进软硬交错地层时井径往往不规则,井壁上有小台阶,该情况下传递到井底的实际钻压会更小,导向翼肋前倒角面与井壁台阶还有可能发生“自锁”现象[11]。由于目前缺少配套的力学分析模型,钻井现场只能凭经验选择名义钻压,造成实际钻压往往达不到预定要求,不仅影响钻井速度,也难以发挥旋转导向钻井技术优势。鉴于此,将井底实际钻压与释放大钩悬重获得的名义钻压之比定义为“钻压传递效率”。基于静态推靠式RSS系统的结构及工作原理,建立了钻压传递效率计算模型,探讨了钻压传递效率的影响因素及规律,为合理选择和调控钻压提供技术支撑。

图1 井壁无台阶时SRST整体受力分析图
1 井壁无台阶时钻压传递效率
在大段均质地层中,新钻出的井眼通常比较规则、井壁无台阶。该情况下,静态推靠式旋转导向钻井工具(SRST)的整体受力分析如图1所示,包括上端面所受轴向力(Wo,释放大钩悬重获得的名义钻压),下端面所受轴向力(Wa,钻头获得的实际钻压),单个导向翼肋工作面上所受井壁支撑力(Nsi,i=1, 2, 3)及对应摩擦力(fsi, i=1, 2, 3)。
由图1可以看出,如果名义钻压较小、不足以克服导向翼肋所受井壁摩擦力,那么井底实际钻压等于0,难以维持正常钻进;如果名义钻压较大、足以克服导向翼肋所受井壁摩擦力,那么实际钻压大于0,能够维持正常钻进。可以推断出,使用SRST系统时,为了确保井底实际钻压始终大于0,释放大钩悬重获得的名义钻压应有最小值要求。
以单个导向翼肋的受力分析为例。井壁无台阶时,导向翼肋工作面所受井壁支撑力等于该导向翼肋提供的推靠力,也即Nsi=Fsi。理论和实践表明,正常钻进时非旋转滑套并非真的不旋转,而是随心轴缓慢旋转[14]。采用等效摩擦系数[15]将导向翼肋工作面所受井壁摩擦力沿井眼轴向、切向进行分解,即
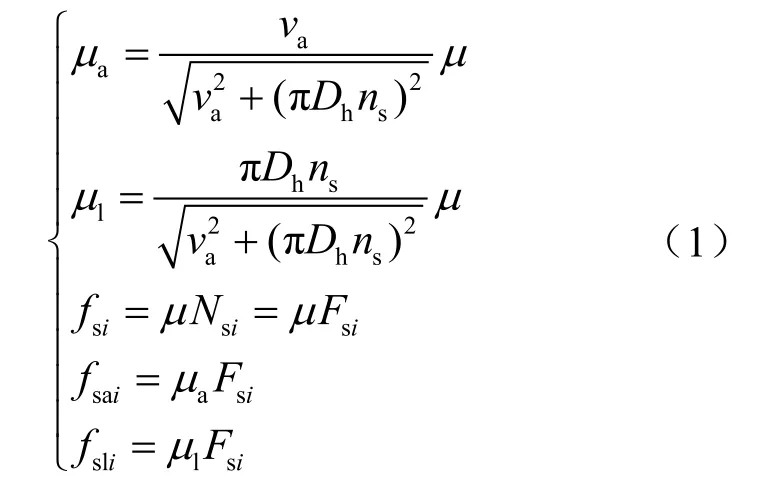
式中va表示机械钻速,m/h;ns表示非旋转滑套旋转速度,r/h;Dh表示井径,m;μ、μa、μl分别表示井壁摩擦系数及其沿井眼轴向、切向的等效摩擦系数,无因次;Fsi表示导向翼肋提供的推靠力,kN;fsi、Nsi分别表示导向翼肋工作面所受井壁摩擦力及支撑力,kN;fsai、fsli分别表示导向翼肋工作面所受井壁摩擦力沿井眼轴向和切向分量,kN;i=1, 2, 3。
同时考虑3个导向翼肋所受外载荷,得到井底实际钻压随名义钻压、导向翼肋推靠力变化规律表达式:

设推靠力之和为Fst(注意:将3个导向翼肋的推靠力相加,不同于导向合力),计算公式如下:

考虑到实际钻压不能小于0,名义钻压较小时需要对式(2)进行修正,即

据钻压传递效率定义,由式(4)直接导出钻压传递效率(cw)计算公式,即

据式(4)可知,为了维持正常钻进,给定各个导向翼肋的推靠力之后,名义钻压应始终大于导向翼肋受到的全部摩擦力,也就是说名义钻压有最小值要求。为了满足钻头高效破岩要求,往往要限定井底最小钻压,名义钻压最小值应满足以下要求:

式中Wamin、Womin分别表示实际钻压最小值、名义钻压最小值,kN。
利用式(6)可以指导钻井司钻合理选择和控制名义钻压,确保钻头获得足够钻压。
2 井壁有台阶时钻压传递效率
在软硬交错地层中,新钻出的井眼不规则,在地层界面处往往有小台阶[16-17]。该情况下,SRST能否通过井壁台阶是能否维持正常钻进的关键所在。
当导向翼肋前倒角面接触到井壁台阶时,SRST整体受力分析如图2所示,Nfi、 ffi(i=1, 2, 3)分别表示前倒角面上所受井壁支撑力及摩擦力。
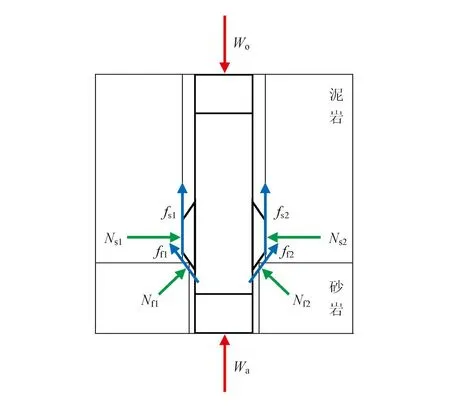
图2 井壁有台阶时SRST整体受力分析图
正常钻进时,SRST能否通过井壁台阶还与导向翼肋受力状态有关。单个导向翼肋受力状态如图3所示。不难看出,该情况下导向翼肋工作面上所受井壁支撑力(Nsi)不再等于导向翼肋施加到井壁上的推靠力(Fsi)。
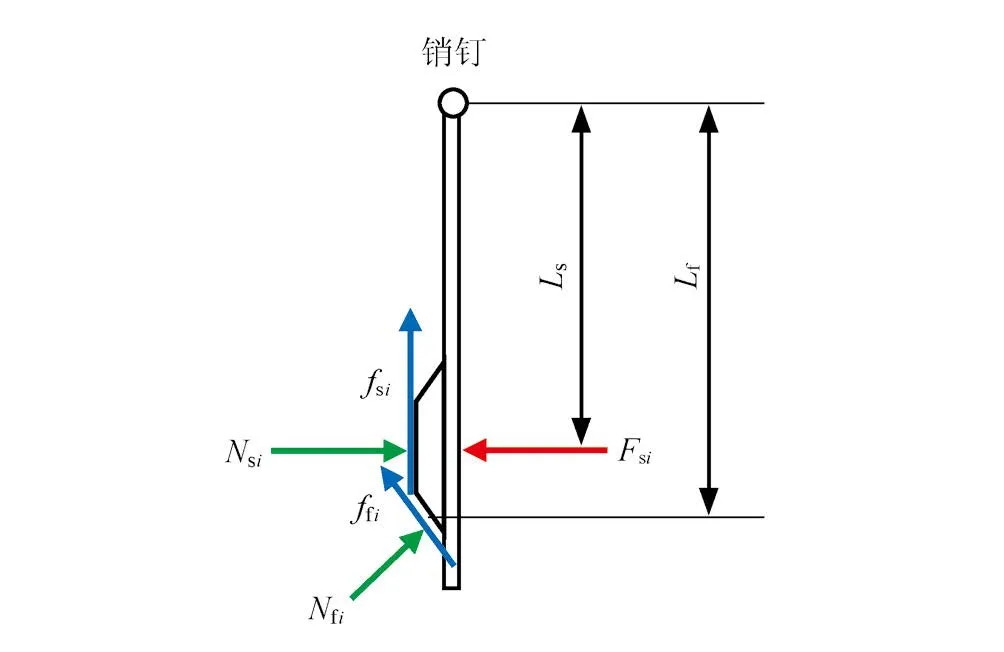
图3 井壁有台阶时导向翼肋受力分析图
综合图2和图3可以推断出,如果名义钻压足以克服导向翼肋工作面所受摩擦力并向下传递至前倒角面上,那么该处的井壁支撑力和摩擦力随名义钻压增加而增大;如果前倒角设计合理,该倒角面不与井壁台阶发生摩擦力自锁,那么当名义钻压增大到一定值时,导向翼肋所受外载荷产生的力矩就有可能迫使导向翼肋回缩(柱塞伸出量减小)并绕固定销钉向内侧转动,SRST就能够通过井壁台阶;否则,如果前倒角设计不合理,造成倒角面与井壁台阶发生摩擦力自锁,或者导向翼肋所受外载荷产生的力矩不能迫使翼肋回缩,那么SRST就不能通过井壁台阶。此外,为了确保导向翼肋处于完全收回状态时能够通过井壁台阶,井壁台阶高度应小于(Dh-Dso)/2;其中,Dh表示井壁无台阶时井眼直径,Dso表示导向翼肋完全收回后直径。
综合上述分析可知:①SRST能否通过井壁台阶与名义钻压、井壁摩擦系数,以及导向翼肋推靠力、前倒角有关;②确保SRST能够通过井壁台阶的前提条件为前倒角面不与井壁台阶发生摩擦力自锁,必要条件为导向翼肋回缩。因此,为维持SRST能够正常钻进工作,首先应对导向翼肋前倒角优化设计,确保该处不发生摩擦力自锁;其次是现场可适当提高名义钻压(即适当多释放一些大钩悬重),确保导向翼肋能够回缩。
当导向翼肋开始回缩时,导向翼肋工作面会逐渐脱离井壁,此时仅考虑导向翼肋前倒角面所受井壁支撑力和摩擦力即可。考虑到井壁有台阶时非旋转滑套的旋转速度会更慢,该情况下忽略非旋转滑套旋转,不需要将前倒角面所受井壁摩擦力进行分解。由图3导向翼肋受力分析可知,3个导向翼肋均绕销钉旋转和回缩需要满足以下力矩平衡关系式:

式中Lf表示导向翼肋总长度,cm;Ls表示翼肋中心至销钉的距离,cm;α表示前倒角,(°)。
导向翼肋前倒角面通过井壁台阶时,SRST所受全部外载荷满足以下力平衡关系式:

由式(7)和式(8)最终得到:

其中μe表示等效摩擦系数,计算公式如下:

考虑到实际钻压(Wa)不可能小于0,当名义钻压(Wo)较小时需要对式(9)进行修正。最终导出实际钻压随名义钻压、导向翼肋推靠力合力变化规律,即

钻压传递效率计算公式为:

对比式(4)和(11)、式(5)和(12)可知,如果井壁有台阶,那么实际钻压和钻压传递效率均小于井壁无台阶时对应值。因此,在软硬交错地层钻进时应适当提高名义钻压,确保SRST能够通过井壁台阶并向钻头传递足够钻压。如果该情况下也限定实际钻压最小值,那么名义钻压最小值应满足以下要求,即

基于前述防止导向翼肋前倒角面出现井壁摩擦力自锁为确保SRST能够通过井壁台阶的前提条件,下面重点探讨前倒角面自锁条件。
对于式(10)来说,通常情况下sinα+μcosα大于 0,cosα-μsinα 大于 0,若分母 cosα-μsinα 趋于0+,则等效摩擦系数(μe)趋于无穷大,该情况下要求名义钻压也要趋于无穷大,才能迫使SRST通过井壁台阶并向井底传递一定钻压,这显然是不可能的。因为SRST的结构强度会限定名义钻压上限值(Womax),如果名义钻压已经达到该上限值而导向翼肋始终未达到回缩条件,那么SRST将难以通过井壁台阶,也将无法维持正常钻进工作。也就是说,当井壁有台阶时,若等效摩擦力大于等于名义钻压上限值,SRST将难以通过井壁台阶。据此分析结果,由式(9)导出导向翼肋前倒角面自锁条件如下:

为了避免导向翼肋与井壁台阶自锁,在旋转导向工具设计阶段应合理设计导向翼肋前倒角,在钻井施工阶段应合理调控导向翼肋的推靠力,同时合理调控钻井液性能来降低摩擦系数。
3 模拟计算分析
重点分析钻压传递效率随导向翼肋推靠力及名义钻压变化规律,以及井壁有台阶时钻压传递效率随导向翼肋前倒角变化规律,为合理选择导向翼肋前倒角和钻压取值范围提供支持。
3.1 模拟计算条件
以川庆钻探工程公司SRST为例,适当参考AutoTrak旋转导向系统,制订模拟条件如下:
1)导向翼肋推靠力:单个翼肋最大推靠力为30 kN,推靠力之和默认值为60 kN。
2)导向翼肋结构参数:总长度为30 cm,翼肋中心至销钉的距离为25 cm;前倒角为30°。
3)其他参数:井径为0.216 m;井壁摩擦系数为0.3;名义钻压默认值为100 kN;钻井速度为5.0 m/h,非旋转滑套转速为2 r/h。
3.2 钻压传递效率随导向翼肋推靠力变化规律
限定名义钻压为100 kN,井壁无台阶和有台阶情况下钻压传递效率及实际钻压随导向翼肋推靠力变化规律如图4所示。
由图4可以看出:限定名义钻压条件下,钻压传递效率和实际钻压均与导向翼肋推靠力之和成反比;井壁有台阶时钻压传递效率和实际钻压均明显低于无台阶时对应值;当导向翼肋推靠力之和较大且井壁有台阶时,钻压传递效率非常低,导致实际钻压远低于名义钻压。因此,为了保持实际钻压相对稳定,每一次调整SRST的工作指令以后,应根据推靠力大小适当调整名义钻压;当导向翼肋推靠力之和较大且井壁有台阶时,还应适当提高名义钻压。
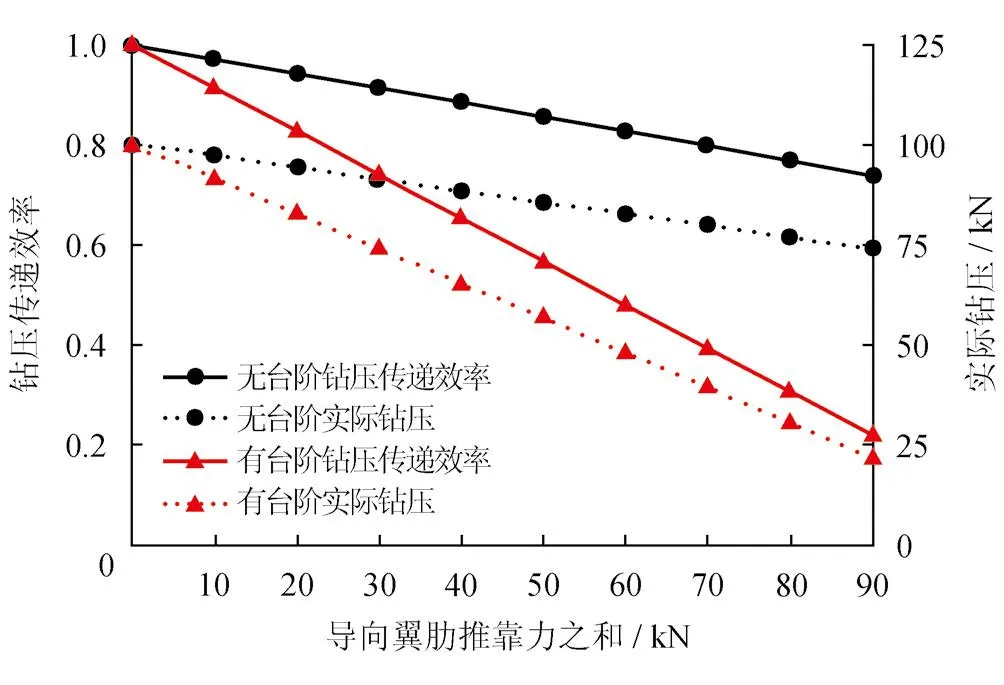
图4 钻压传递效率及实际钻压随推靠力变化规律图
3.3 钻压传递效率随名义钻压变化规律
限定导向翼肋推靠力之和为60 kN,井壁无台阶和有台阶情况下钻压传递效率及实际钻压随名义钻压变化规律如图5所示。从图5可以看出:限定导向翼肋推靠力条件下,名义钻压超过某个值之后,钻压传递效率及实际钻压才大于0;钻压传递效率随名义钻压增大而增长,但是增长速度会越来越小;实际钻压与名义钻压成正比;井壁有台阶时钻压传递效率和实际钻压均明显低于无台阶时对应值;若限定钻压传递效率不低于0.5,则名义钻压应不小于100 kN。因此,使用SRST时,名义钻压应有最小值要求,必须克服翼肋所受摩擦力;当井壁有台阶时还应适当提高名义钻压。

图5 钻压传递效率及实际钻压随名义钻压变化规律图
3.4 钻压传递效率随井壁摩擦系数变化规律
限定导向翼肋推靠力之和为60 kN,名义钻压为100 kN,钻压传递效率及实际钻压随井壁摩擦系数变化规律如图6所示。
由图6可以看出:钻压传递效率及实际钻压均随井壁摩擦系数增大而减小;井壁有台阶时钻压传递效率和实际钻压均明显低于无台阶时对应值。因此,在加工导向翼肋时,应确保工作面和倒角面光滑,以便降低摩擦系数,提高钻压传递效率。在钻井现场,如果井眼不规则、钻井液润滑性较差,应适当提高名义钻压,确保钻头有足够钻压。
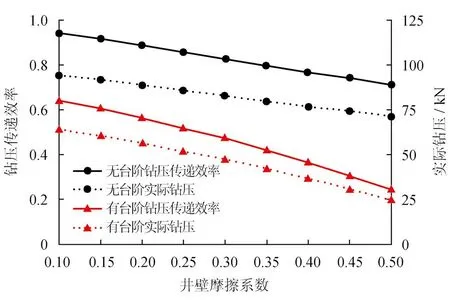
图6 钻压传递效率及实际钻压随井壁摩擦系数变化规律图
3.5 钻压传递效率随导向翼肋前倒角变化规律
井壁有台阶条件下,限定导向翼肋推靠力之和为60 kN,名义钻压为100 kN,钻压传递效率及井底实际钻压随导向翼肋前倒角变化规律如图7所示。可以看出:井壁有台阶情况下,钻压传递效率和实际钻压均随导向翼肋前倒角增大而降低,且降低速度均越来越快;当前倒角较大时,钻压传递效率和实际钻压均有可能降低到0,也即前倒角面有可能与井壁台阶发生自锁。因此,必须合理设计导向翼肋前倒角,避免前倒角面与井壁台阶发生自锁。从图7中可以看出,该条件下若限定钻压传递效率不低于0.5,则合适的导向翼肋前倒角值约为30°。

图7 钻压传递效率及实际钻压随导向翼肋前倒角变化规律图
4 结论
基于静态推靠式RSS的结构及工作原理,建立了钻压传递效率分析模型。研究表明:
1)静态推靠式RSS正常工作时会降低钻压传递效率,名义钻压应有最小值要求,适当提高名义钻压有助于提高钻压传递效率。
2)导向翼肋推靠力之和越大、井壁摩擦系数越大,钻压传递效率越低。
3)井壁有台阶时,导向翼肋前倒角越大则钻压传递效率越低,严重时可能与井壁自锁。
猜你喜欢
工程技术研究(2021年7期)2021-05-30 02:55:04
石油研究(2020年5期)2020-07-23 16:33:23
音乐教育与创作(2020年3期)2020-05-13 06:47:08
中国化工贸易·下旬刊(2019年5期)2019-10-21 09:44:52
好日子(2018年9期)2018-10-12 09:57:18
科学与财富(2016年37期)2017-07-13 00:52:53
中国科技博览(2017年10期)2017-05-25 18:01:40
时代农机(2017年2期)2017-04-02 19:19:12
山东工业技术(2016年15期)2016-12-01 05:31:51
上海金属(2016年2期)2016-11-23 05:34:40
