大视场双远心工业镜头光学系统设计*
2018-11-26 11:46陈智利刘雨昭费芒芒成国贤
西安工业大学学报 2018年5期
陈智利,刘雨昭,费芒芒,成国贤,王 栋
(1.西安工业大学 陕西省薄膜技术与光学检测重点实验室,西安 710021;2.淮海工业集团第二研究所,长治 046000)
机器视觉系统克服了人工检测引起的各种测量误差,具有非接触检测,精度高,观测范围宽,适应性强,响应快及连续稳定等优点,有效地提高了检测精度与效率.“图像采集”为机器视觉处理的首要任务,工业镜头是图像采集的关键部件,决定着机器视觉的性能,其好坏直接影响后续信息的获取和处理,进而影响产品的识别与检测[1].双远心镜头具有畸变小,放大倍率恒定及大景深等优点,应用非常广泛[2].
相对于普通工业镜头,双远心镜头对被测物体的离面位移、相机传感器平面位置的微小改变及相机自热不敏感,且镜头畸变也非常小[3].文献[4]通过对机器视觉应用中镜头远心度引起的平行性误差及其对离焦物体测量结果影响的讨论,指出物体偏离最佳成像面而引入的误差中,平行性误差占到90%左右,小的远心度可大大提高系统测量精度.本文根据某航空异型零件的机器视觉小畸变、大视场等检测要求,确定了双远心物镜的主要光学性能技术指标,合理选择了初始结构和玻璃组合,通过像差优化设计出一款放大倍率为-0.18 的小远心度的双远心物镜,其性能指标达到设计要求,并对其光学结构公差参数进行了敏感度分析.
1 双远心光学系统原理
物方远心光路是将孔径光阑放置在光学系统的像方焦平面上,此时物方主光线的会聚中心位于物方无限远,如图1(a)所示,该光路可以消除物方由于调焦不准确带来的读数误差,即在一定的距离范围内,图像放大倍数不随物距的变化而变化.
像方远心光路是将孔径光阑放置在光学系统的物方焦平面上,像方主光线的会聚中心位于像方无限远,如图1(b)所示,该光路可以消除像方调焦不准确引入的测量误差,像平面位置的变化不会影响系统的成像大小.
双远心光学系统综合了物方远心镜头与像方远心镜头二者的优点,避免了两种方法产生的测量误差,保证了测量数据的精确度,如图1(c)所示,该系统主要用于机器视觉检测领域[5-8].
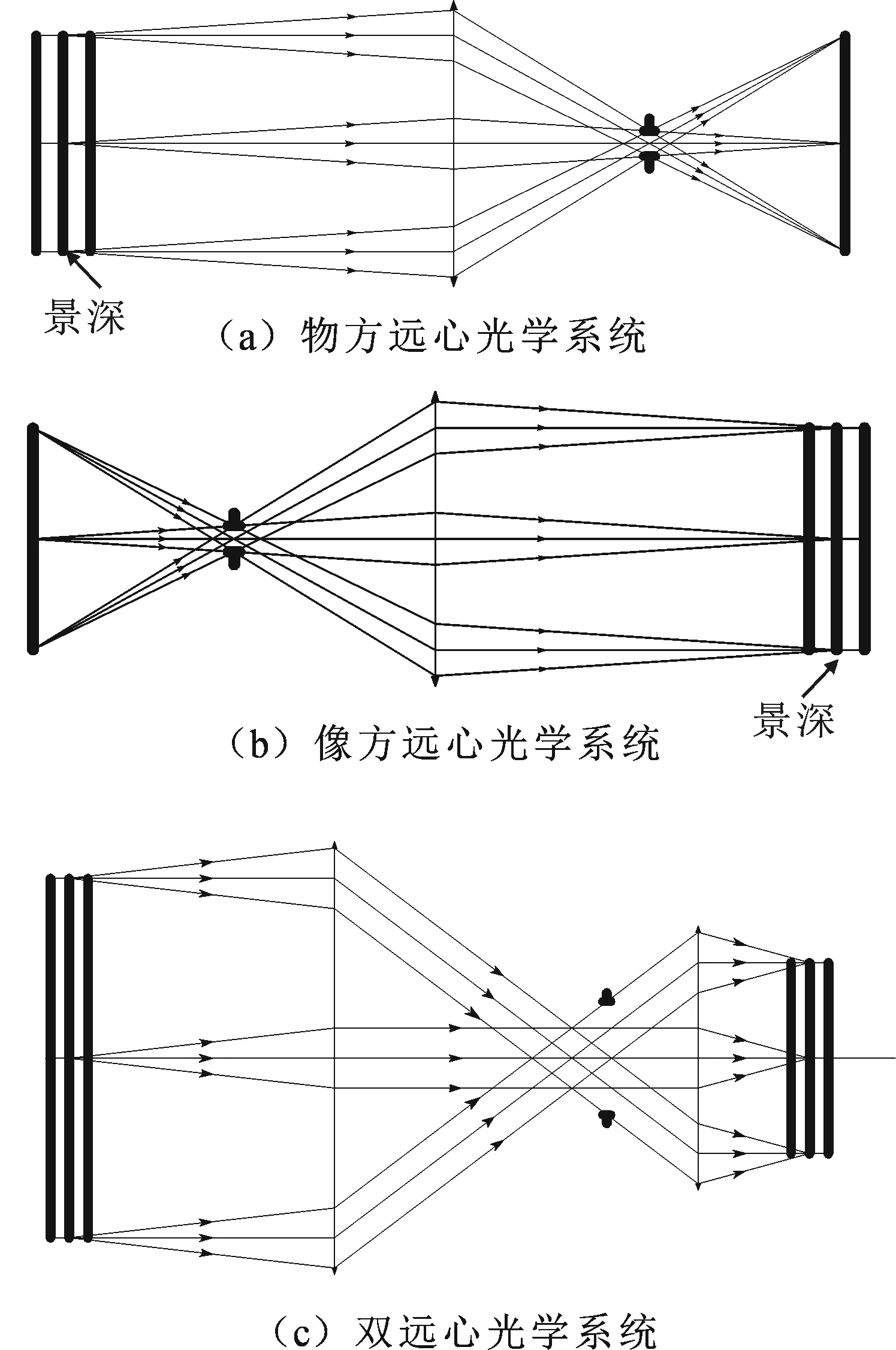
图1 远心光学系统Fig.1 Telecentric optical lens
双远心镜头的设计通常有三种方法:① 先设计一个像方远心系统,然后对优化好的像方远心系统进行结构的对称变换,得到物方的远心系统,组合形成双远心光学系统;② 分别设计像方远心系统和物方远心系统,组合形成双远心光学系统;③选取双高斯结构或反远距等光阑位于系统中部的普通成像系统作为初始结构,对其优化后,前半部分形成物方远心系统,后半部分形成像方远心系统,从而组合构成双远心光学系统.
2 双远心光学系统设计参数计算
在机器视觉的非接触测量中,双远心镜头的优势在于其具有恒定的放大倍率,更大的景深和低畸变,其最主要的参数为放大倍率、视场和景深等.本文以某航空异型零件为检测对象,该零件最大线视场为55 mm深度为14 mm,要求分辨率为0.050 mm,畸变要求小于0.5%.考虑到检测时留一定余量,设计时给定线视场60 mm(48 mm×36 mm),针对该零件的检测要求,本设计采用低畸变和长景深的双远心光学系统,基本参数计算如下:
1) 视场计算
采集相机所需水平像元数为960个,采集相机所需垂直像元量为720个.要求电荷耦合元件(Charge-Coupled Device,CCD)相机的分辨率≥960×720 pixel=691 200 pixel,故系统选用索尼2/3 inch (8.8 mm×6.6 mm)的140万pixel的CCD相机(1 360×1 024 pixel),C接口类型,其像素尺寸为6.45 μm×6.45 μm,对角线尺寸为11 mm,即最大像高为11 mm,像方半线视场为5.5 mm,其分辨率可达77.5 lp·mm-1.
2) 放大倍率计算
系统的放大倍率β表达式为
(1)
式中:y′为像方线视场(y′取11 mm);y为物方线视场(y取60 mm).根据技术指标要求可得到系统的放大倍率β=-0.18.

(2)

表1 镜头技术指标
3 镜头结构选择与优化
3.1 光学系统结构的选择
文中双远心系统设计中采用了第三种方法,以光阑位于系统中部的普通成像系统作为初始结构进行设计.根据表1的系统技术指标,在ZEMAX专利库中选择了一款反远距结构作为初始结构,如图2所示.反远距物镜是一种中等视场、大孔径的摄影物镜,该物镜由分离的负正光组构成,后工作距大于焦距.反远距物镜的光阑常设在正组中间,靠近像面,前组远离光阑,轴外光束有较大的入射高度,产生较大的轴外像差,后组承担了较大的孔径,视场由于前组的发散作用已经有所减小.
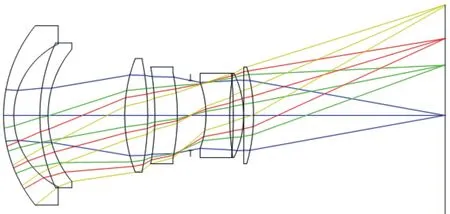
图2 光学系统结构图Fig.2 Structure diagram of optical system
3.2 光学系统的优化
设置视场类型为物高,选取的三个视场分别为0 mm、21.21 mm和30 mm,设计波长为C(656 nm )、D(587 nm )和F(486 nm ),主波长为D(587 nm ).选择优化类型为PTV-Spot Radius-Chief Ray,该优化设置可使系统像点以主光线为中心,弥散斑直径尽量小.优化类型选定后,可以得到默认像差评价函数,再在评价函数中加入操作数来控制其他光学性能.
反远距物镜在优化时,前组产生的轴外像差力求由本身解决,剩余量尤其是垂轴像差(彗差、畸变和倍率色差)需要后组补偿.在系统像差校正中可以依靠厚透镜的结构变化来校正场曲,利用薄透镜的弯曲校正球差,改变厚透镜之间的距离可以校正像散,利用不同的玻璃组合校正色差.
3.2.1 双远心结构优化
由于双远心镜头的出瞳在无限远处,当参考光轴的主光线穿过系统到达像面时,要求主光线的角度为0°,使用RANG操作数控制主光线角度,将目标值设置为0.优化典型操作数的定义:
1) 放大率(PMAG):该操作数描述了所选波长的放大率,仅用于有焦系统.根据技术要求该操作数设定为-0.18.
2) 远心度(RANG):该操作数描述了主光线偏离光轴的角度.根据远心系统的设计要求,远心度应尽可能小,优化函数设置时对入瞳Hy分别选择0.500,0.707和1.000对系统进行远心度优化.
上述操作数设置及优化后结果见表2,光学系统的远心度最大值为0.001 9 rad,即0.11°.
3.2.2 像质优化
1) 场曲与畸变
畸变描述了主光线的像点与理想像点在垂轴方向的偏离程度,其反映了物与像之间的相似程度.远心系统对畸变有较高的要求,需在优化函数中设置操作数限定系统的畸变值,操作数DIMX可用来约束指定波长的最大畸变.畸变操作数设定及优化结果见表3.

表2 优化操作数的设定及优化结果

表3 畸变操作数设定及优化结果
2) 点列图
点列图描述了物点经光学系统后所成像点的聚集程度,运用Spot Diagram图像评价成像质量,点列图的形状是一个参考标准,从标准点列图和离焦点列图可分析出系统的球差、彗差、像散、场曲、位置色差和倍率色差等多种像差的大小,点列图也是判断系统分辨率的重要指标.点列图对像差的评价有两个判断标准:均方根半径(RMS)和几何半径(GEO),单位为μm.少数光线的像点离散较大,而其他光线的像点分布相对集中,则RMS半径较小,GEO半径较大.少数光线的离散对系统成像质量影响较小,实际中多采用RMS半径衡量系统的成像质量.
3) 调制传递函数(Modulation Transfer Function,MTF)
光学传递函数描述了物体经过光学系统后,物与像对不同空间频率的对比度及位相的变化关系,光学传函既与光学系统的像差有关,又与光学系统的衍射效果有关,是一种客观可靠的像质评价方法.根据设计要求,光学系统的分辨率为56 lp·mm-1,取60 lp·mm-1.通过OPGT配合MTFS、MTFT及MTFA三种操作数,对系统进行优化,在空间频率为60 lp·mm-1,MTF曲线达到较好的效果,其值均大于0.5.
为了进一步提高系统的成像质量,需对0.300,0.500,0.707,0.850和1.000等5个视场进行优化与评价.设定视场后,适当的增大评价函数中的环带与臂值,采用自动优化和锤形优化相结合的方式,优化后的MTF较先前有了较明显改善,成像质量有了较大的提高.
优化函数中传函操作数典型设置见表4.表4中给出了部分传函操作数的设置,在第一行中5给出了第5个视场即全视场(30 mm)处60 lp·mm-1处传函值,由于权重设置为0,在优化中该操作数不起作用;而第二行设置了OPGT运算操作数,要求第一行操作数MTFA的目标值大于0.55,通过这两个操作数的配合使用,使第5个视场在60 lp·mm-1处传函值大于0.55.

表4 传函操作数设定及优化结果
4 结果及分析
经过优化后最终得到系统的光学系统结构图如图3所示,点列图、垂轴像差曲线图、场曲/畸变图以及MTF曲线如图4所示.

图3 光学系统结构图Fig.3 Structure diagram of optical system
由图4可知MTF在60 lp·mm-1时大于0.55;畸变小于0.1%;点列图中的RMS Radius最大为2.498 μm,GEO Radius最大为6.287 μm,且都在埃里斑以内,系统成像质量优良,满足了技术指标要求.
图5给出了前后景深(±8 mm)处MTF和弥散斑图.由图5可看出,系统在前景深处(108 mm)MTF在30 lp·mm-1均大于0.58,点列图RMS半径小于8.50 μm;在后景深处(92 mm),MTF在30 lp·mm-1均大于0.58,点列图RMS半径小于8.88 μm,弥散斑小于检测分辨率(50×0.18 μm=9 μm),在成像深度范围内(14 mm),具有良好的成像质量.

图4系统像质评价曲线
Fig.4 Evaluation curves of optical system image quality
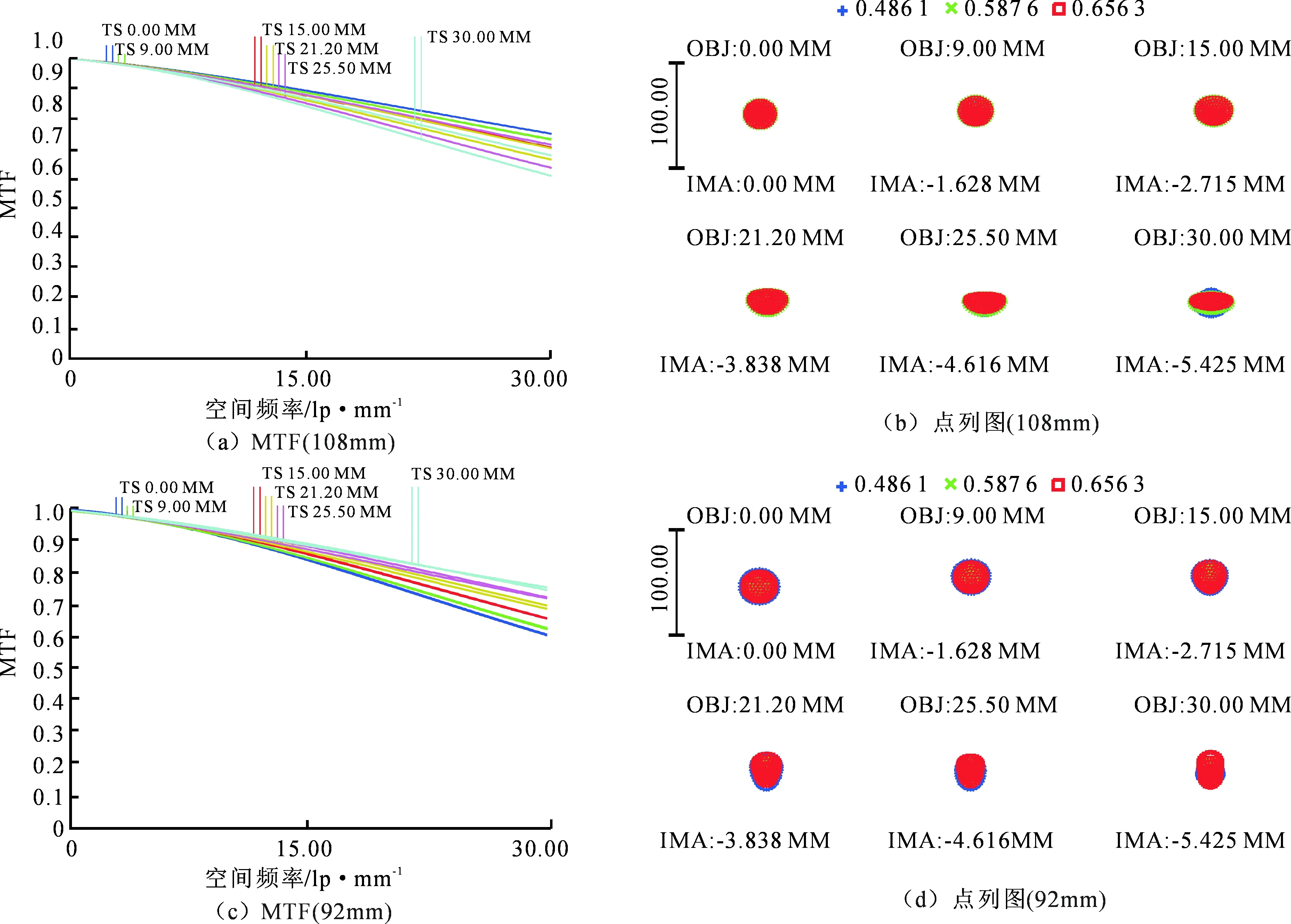
图5 系统前后景深处MTF和点列图Fig.5 MTF and spot diagrams of optical system in the front and behind depth of field
光学系统的设计不仅需要满足所有的性能指标,还要考虑影响光学系统成像质量的各种因素及加工成本.为了降低光学元件的加工成本,首先需要对设计的半径进行规化处理(套样板),采用工厂现有能力可加工的曲率半径,以减少特制工装和夹具的费用.套样板后,光学元件的半径值产生了变化,会对光学系统的像质产生一定的影响,需要对像质再次进行分析和优化;另外,设计的光学系统还需进行公差分析,进一步确定系统设计和加工的可行性,提高产品的良品率.ZEMAX软件提供了公差分析工具,表5给出了曲率半径和厚度公差的初步设置值.
利用ZEMAX的公差分析功能对系统成像质量进行了分析,依据结果对部分公差进行了重新定义,表6给出了修正后影响系统成像质量最显著的6项公差数据.
利用蒙特卡罗分析法对光学系统的公差进行分析,最终结果如图6所示,在60 lp·mm-1时,MTF的名义值为 0.597,最佳 0.599,最差 0.435,平均0.557,标准偏差0.040;90%的镜头MTF≥0.480,50%的镜头MTF≥0.570,10%的镜头MTF≥0.595.由此可以看出MTF在所给公差下满足技术指标的要求.

表5 公差的设置
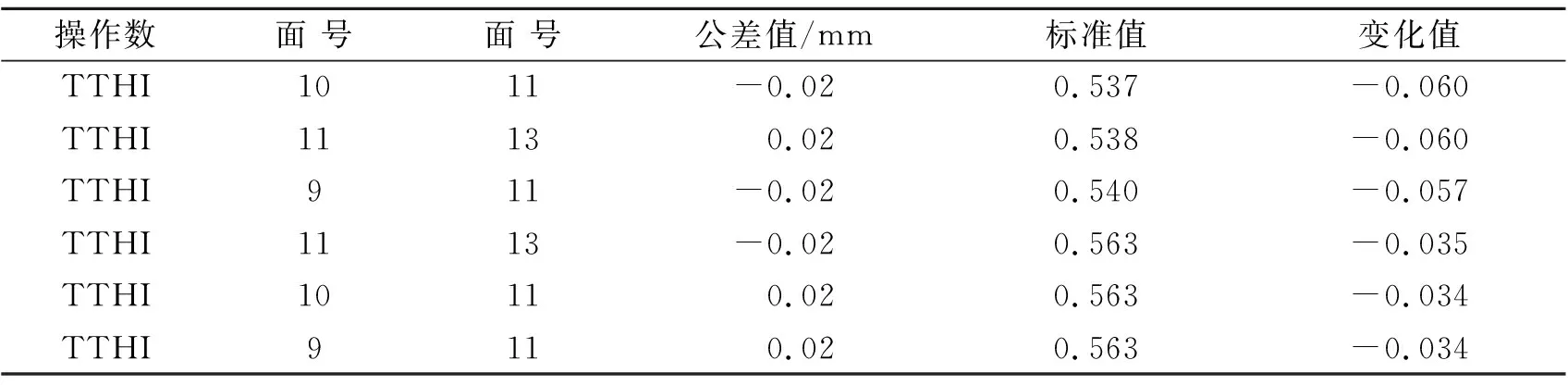
表6 公差修正后影响系统成像质量最显著的6项公差数据Tab.6 Worst offenders of optical system on the imaging quality after the tolerance has been modified
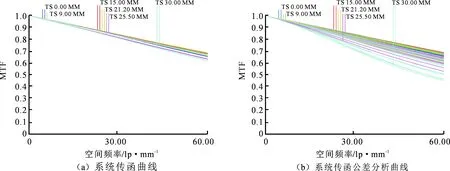
图6 系统公差分析MTF曲线Fig.6 The MTF of optical system tolerance analysis
5 结 论
根据被测零件的特征,文中对光学系统的视场、放大率和焦距等主要光学性能参数进行了分析和计算,确定了双远心光学结构类型.以反远距系统为初始结构,运用了ZEMAX软件对系统进行了设计,系统采用了近似对称结构自动校正垂轴像差,通过厚透镜校正场曲,利用薄透镜弯曲校正球差,改变厚透镜的间隔校正像散,以点列图、场曲畸变图等像差曲线及调制传递函数(MTF)曲线等对镜头成像质量进行了评价,最终获得了一款小畸变、高分辨率、大视场及结构简单的双远心物镜.结果表明:设计的双远心工业镜头由7片透镜组成,在工作距离为100 mm,F数为8,设计波长为可见光波长,物方线视场为60 mm,2/3 inch CCD (8.8 mm×6.6 mm)为接收器件的条件下得到了放大倍率β为-0.18,畸变小于0.1%,远心度优于0.12°,调制传递函数(MTF)曲线在空间频率为 60 lp·mm-1时,MTF值皆大于0.55的双远心光学系统,满足了系统设计要求.
猜你喜欢
现代电子技术(2022年18期)2022-09-17
科学技术创新(2021年25期)2021-09-11
探索科学(学术版)(2021年3期)2021-05-18
东南大学学报(自然科学版)(2020年1期)2020-01-16
中国医疗设备(2019年1期)2019-01-15
摄影之友(影像视觉)(2017年10期)2017-11-07
制造业自动化(2017年2期)2017-03-20
中学生数理化·教与学(2016年6期)2016-06-15
中国塑料(2015年6期)2015-11-13
中国铁道科学(2015年4期)2015-06-21