
基于ANSYS的六自由度工业机器人静力学分析
2018-11-26 01:58
制造业自动化 2018年11期
(山西机电职业技术学院,长治 046011)
0 引言
工业生产中,六自由度机器人的应用非常普遍,工业机器人零部件的微小变形,会对机器人的精度产生影响,六自由度机器人的制造成本较高,开发周期较长,数值模拟能够极大缩短开发周期,同时找到更加合理的设计方案[1~3]。使用Pro/E软件确定机器人各个零部件的质量和相对位置,计算求得各个部分的载荷大小,在ANSYS中模拟,能够直观展现旋转座、摆动臂、摆动关节、旋转臂的应力和应变图[4,5]。
1 六自由度机器人模型建立
1.1 建立几何模型
六自由度机器人结构复杂,利用等效刚度代换理论,忽略线路、电位器、导线管等对计算结果影响不大的部件,将简化后的旋转座、摆动臂、摆动关节、旋转臂作刚性一体化处理[6~8],得到机器人模型如图1所示。
1.2 定义模型材料及网格划分
六自由度机器人安装底座使用耐磨性好的HT 250灰铸铁,旋转座、摆动臂、摆动关节与旋转臂均采用线收缩小的ZL 108,材料属性如表1所示。使用ANSYS Workbench网格划分工具对旋转座、摆动臂、摆动关节、旋转臂分别进行网格划分,节点数和单元数如表2所示,网格划分情况如图2所示。
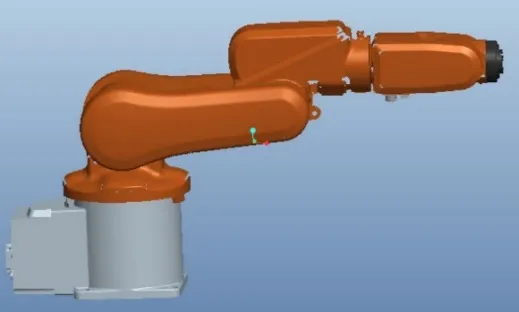
图1 六自由度工业机器人模型
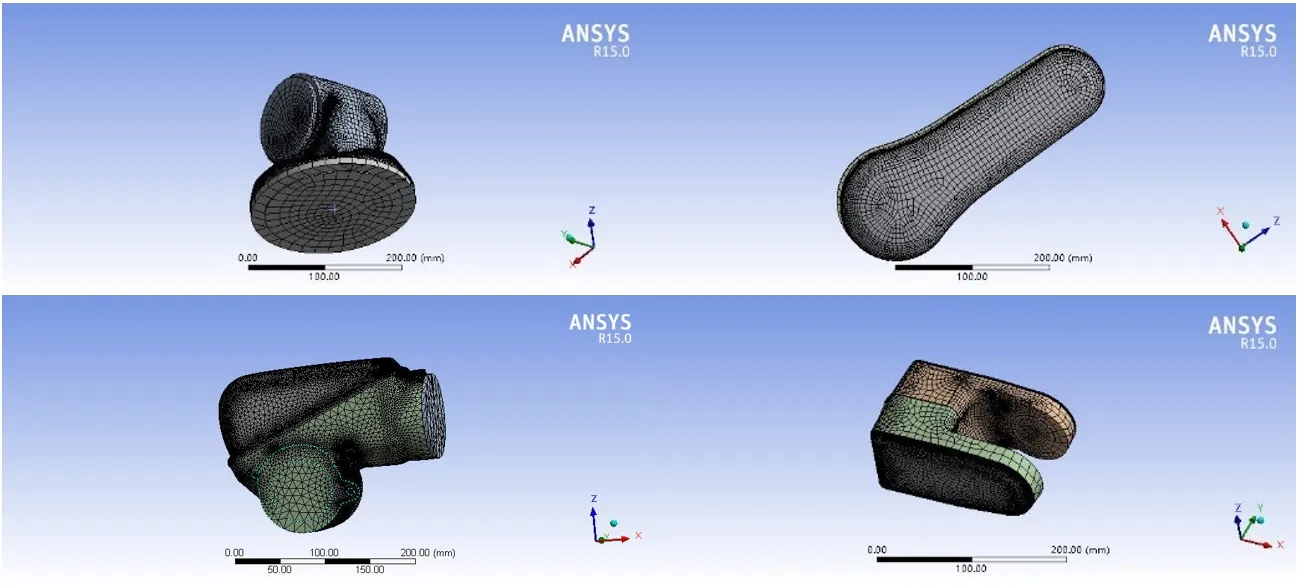
图2 机器人零件网格划分结果

表1 机器人零件材料属性

表2 各零部件网格节点数与单元数
2 六自由度机器人零部件静力学分析
2.1 施加载荷
机器人的末端执行器在水平位置的位移量最大,选取该位置进行分析。由于自身重力,机器人各部分位置不同,受力也不同。以摆动关节为例,竖直方向受到机器人旋转臂和腕关节的作用,总质量为3.549kg,力的大小为49.490N,端面面积为0.003383m3,产生的压力为0.01463MPa,在Pro/E中测得力的作用点距离摆动臂端部沿臂展方向的距离为98.26mm,产生4863N·mm的力矩。各部分的受力大小如下表3所示。

表3 机器人零件载荷大小
2.2 应力分析
无预加载荷状态下,得到机器人零部件的应力分布云图3和应力大小表4。

图3 重力作用下的应力分布云图

表4 重力作用下的应力大小
从图3和表4可以看出,在无荷重时,机器人零部件中,旋转座的最大应力为0.76352MPa,摆动臂的最大应力为1.0513MPa,摆动关节的最大应力为0.31246MPa,旋转臂的最大应力为0.37608MPa,摆动臂承受的应力最大,为1.0513MPa,危险位置在与旋转座连接处圆形端面的右侧边缘,摆动关节承受的应力最小。最大应力均远远小于ZL 108的许用应力。
2.3 应变分析
载荷和约束施加到摆动臂上后,进行求解,得到摆动臂无荷重下的总形变位移分布图4和应变大小表5。
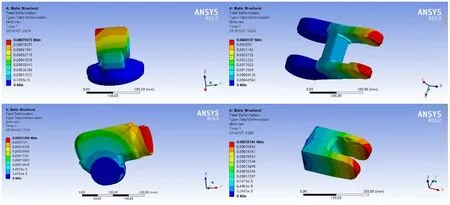
图4 重力作用下的总应变分布云图

表5 重力作用下的应变大小
从图4和表5可以看出,无荷重时,机器人旋转座的最大形变量为0.00079073mm,摆动臂的最大形变量为0.0040107mm,摆动关节的最大形变量为0.00031286 mm,旋转臂的形变量为0.00035741mm,相比之下,摆动臂的应变最大,对于机器人精度的影响更大,应变最大的位置在摆动臂右侧顶端。
3 结论
建立了六自由度工业机器人模型,使用Pro/E软件得到机器人模型各个部分的质量、质心、坐标数据,使用ANSYS对机器人进行静力学分析,获得了机器人旋转座、摆动臂、摆动关节、旋转臂的应力和应变的变化规律。结果表明,在无荷重时,机器人零部件中摆动臂承受的应力最大,为1.0513MPa,危险位置在与旋转座连接处圆形端面的右侧边缘,摆动关节承受的应力最小;无荷重时,六自由度机器人摆动臂的应变最大,为0.0040107mm,位于摆动臂右侧顶端。
猜你喜欢
小哥白尼(神奇星球)(2022年5期)2022-08-15
导航定位学报(2022年4期)2022-08-15
哈尔滨轴承(2021年1期)2021-07-21
中华养生保健(2020年10期)2021-01-18
科普童话·神秘大侦探(2020年3期)2020-05-11
中国现代中药(2019年5期)2019-07-03
名家名作(2017年3期)2017-09-15
小天使·一年级语数英综合(2016年9期)2016-05-14
汽车文摘(2015年5期)2015-12-16
小天使·四年级语数英综合(2015年3期)2015-04-20
