
电子扫描雷达信号主干工作模式的提取
2018-11-21 03:40张玉虎凌寒羽
电光与控制 2018年11期
关 欣, 张玉虎, 凌寒羽
(海军航空大学,山东 烟台 264001)
0 引言
随着现代技术的不断发展,各种新体制雷达层出不穷,新体制雷达因其自身区别于传统体制雷达的特性和优势而大量装备部队,并加入新型战舰飞机的装备列表。其中,电子扫描体制雷达以其多波束形成能力、快速扫描能力、波束捷变能力等优势得到了广泛应用。电子扫描雷达最突出的特点和优势是具有搜索加跟踪(TAS)的工作模式,该模式的特点是搜索模式与跟踪模式的相互穿插,在这种情况下,电子扫描雷达的主干工作模式是搜索目标,并能够在扫描的波位变化序列中插入一些优先级更高的跟踪波位和制导波位等,这样在电子扫描雷达完成搜索任务的同时执行一些其他的优先级更高的任务。对于一部电子扫描雷达来说,其对搜索任务空域的搜索过程是由波位控制表来控制的,而且是在进行目标搜索时就已经确定了的,然而在雷达搜索的目标空域中对目标的跟踪和对武器的制导,则是根据目标搜索得到的目标信息以及己方武器平台的发射参数等来决定的,这都是随机变化的。因此,电子扫描雷达工作时的状态变化方式和其中的不变性是对电子扫描雷达进行识别的一个突破口。
专家学者们对基于电子扫描雷达工作状态的变化过程来识别电子扫描雷达的方法所进行的科学研究还是相对较少,取得的成果也屈指可数。文献[1]通过句法模式识别对雷达序列脉冲参数进行了训练识别,但是未对雷达的工作模式进行识别;文献[2]借鉴了生物学中的信息分析比对技术,提出了通过对两个不同时间侦察得到的序列比对,获得其中的相似部分,并进行电子扫描雷达的识别。文中先通过对两个信号进行时间上的对准,然后采用经典的Needleman-Wunsch算法提取两个序列的不变子序列,最后回溯得到最终的识别结果;但是其假设是我方电子侦察设备截获了敌方雷达一个完整的搜索跟踪的序列,而在现实中这是不可能的。
本文通过分析电子扫描雷达的工作模式序列的生成和不同时间的序列的特点,结合Needleman-Wunsch算法的思想,对两个电子扫描雷达工作模式序列提取公共特征,两个序列的相同子序列表示的是电子扫描雷达的主干工作模式的序列,而不同的序列则表示高优先级的序列,比如跟踪模式或者制导模式的信号序列。仿真实验结果表明了本文算法的有效性和实用性。
1 电子扫描雷达的工作模式转换
电子扫描雷达在对某一个目标搜索空域进行搜索时,雷达天线的馈电系统会通过天线控制器将目标搜索空域划分为几个不同的区域,并对其采用不同的数据率进行搜索。在每个搜索空域中,电子扫描雷达以正弦空间坐标系来对目标空域进行划分,如图1所示。
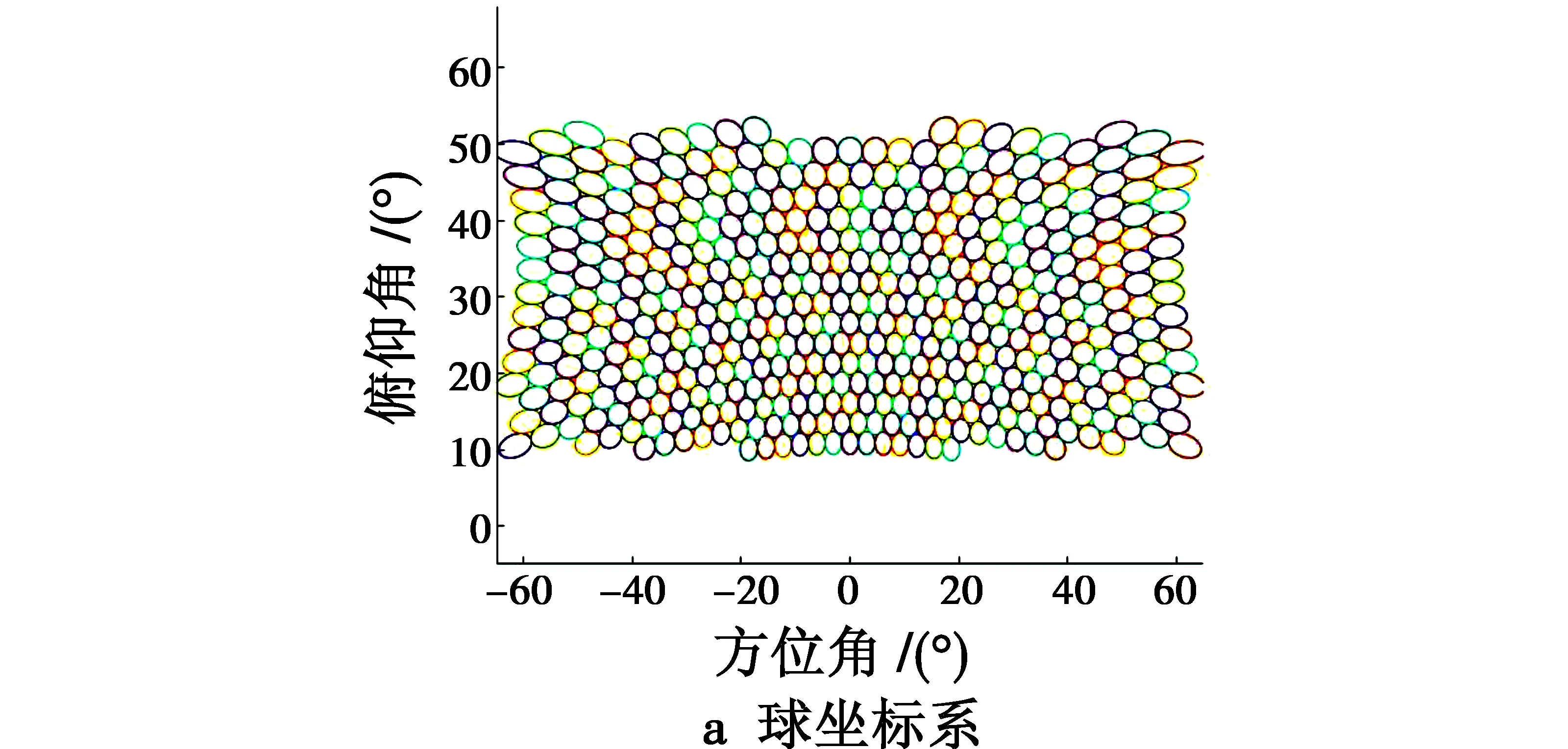
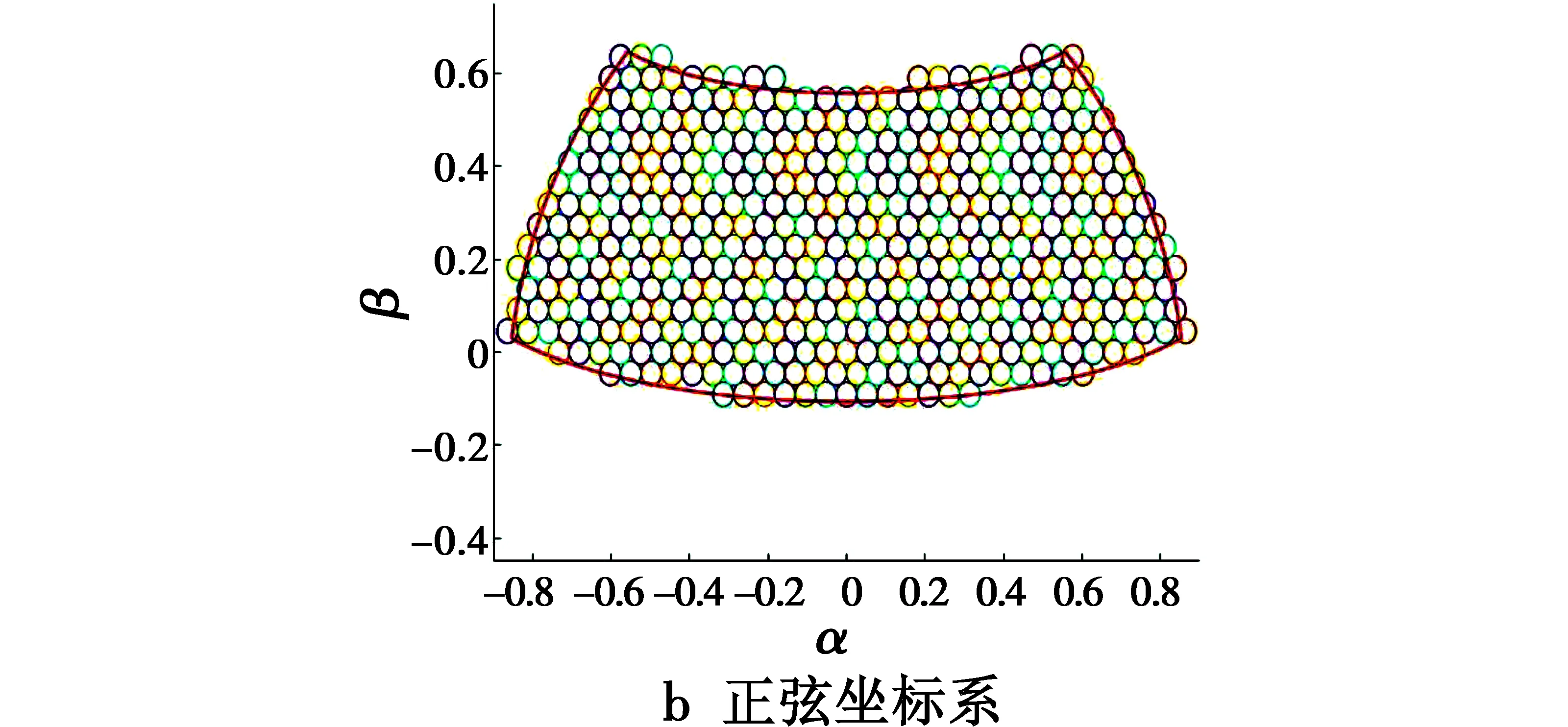
图1 不同坐标系下的天线波位排布Fig.1 Beam position arrangement under different coordinates
在对目标空域进行目标搜索时,电子侦察设备截获的电子扫描雷达辐射源信号的工作模式的序列是一个固定信号序列的循环,因为电子扫描雷达对目标空域的搜索顺序是固定的,在每次搜索目标空域时电子侦察设备截获的信号序列就会重复一遍。因此,这也就是后面的公共序列提取的基础。
但是,电子扫描雷达不可能只对目标空域进行搜索,在搜索到目标后,电子扫描雷达会根据一定的需求执行一些高优先级的任务,包括对目标的跟踪任务和对我方武器的制导任务。因此,一旦出现这类任务,电子扫描雷达需要先进行目标跟踪或者武器制导,从电子侦察设备的截获信号序列来看,就会在辐射源的搜索序列中的任何时刻都有可能出现任意数量的跟踪任务脉冲或者制导任务脉冲。因此,在不同时刻截获的电子扫描雷达信号脉冲序列的模式的相同点就在于搜索模式序列的提取上,提取了电子扫描雷达的搜索模式之后就可以对电子扫描雷达的工作模式进行识别。
2 工作模式转换理论模型
电子扫描雷达是一种多功能雷达,能够同时完成不同类型的任务,其中最典型的就是跟踪加搜索TAS模式[3]。不同类型的任务要求电子扫描雷达工作在不同的模式下,不同的工作模式也就决定了雷达信号脉冲参数之间存在着差异。电子扫描雷达的工作模式可以说是任务导向的,其工作流程如图2所示。
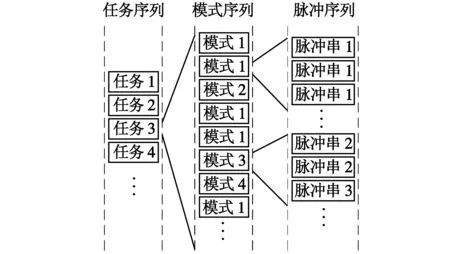
图2 电子扫描雷达工作流程图Fig.2 Operational flow chart of AESA
电子扫描雷达的任务决定了采用的工作模式,工作模式又决定了天线辐射的脉冲序列。电子扫描雷达处于搜索状态时,在不同的搜索空域中采用的是不同的数据率[4],因此搜索状态之间是存在不同的;同样地,对不同状态和不同威胁程度的跟踪目标,以及我方发射的、处于不同阶段的打击武器,雷达产生的跟踪信号序列和制导信号序列也不一样。由于跟踪信号序列与制导信号序列都是随机变化的,均与搜索信号序列不同,因此本文只考虑搜索信号序列中加入跟踪信号序列的模型。
电子扫描雷达在天线波束的搜索过程中,天线的波束宽度是会随波束指向角的变化而发生改变的,在电子扫描列天线的法线方向上,天线的波束宽度是最窄的,对目标的搜索也是最准确的;而等到天线波束扫描到天线阵面法线的大角度时,天线的波束宽度会展宽,等到天线扫描的最大角度60°时,天线的波束宽度能够展宽到法线方向的两倍,此时雷达的角度分辨力和精度会下降,使得对目标的搜索性能下降,同时不同的波束高度角、天线的波束宽度也是不同的。为了达到最优的搜索效果,电子扫描雷达通过改变数据率等方式对这些区域进行搜索,提高在该区域的性能。
设电子扫描雷达的搜索序列信号脉冲参数S有M种,跟踪序列信号脉冲参数T有N种,则两种序列可以表示为
(1)
那么,电子扫描雷达的全部序列信号脉冲参数PPulse表示为
PPulse=S∪T
>。
(2)
定义运算insert(x,A)为在序列x中随机位置插入一个符号A,那么运算insert(x,y)表示将序列y中的元素依次随机插入序列x中。
并设电子扫描雷达的主干工作模式序列为
s0=PS 1PS 2…PS M
(3)
则电子扫描雷达的任何任务脉冲均为主干工作模式脉冲序列s0中随机插入任意的跟踪脉冲序列T的组合。设获得的两个序列分别为e1和e2,数学表达式为
e1=insert(s1,t1)
(4)
e2=insert(s1,t2)
(5)
式中:s1为前文中的主干工作模式序列s0的任意次的重复,而且不一定是序列s0的整数次重复;t1和t2为电子扫描雷达跟踪序列T中任意数量的参数的组合。
e1∩e2≈s0
>。
(6)
两个序列提取的相同的序列是序列s0的某个循环移位,也是电子扫描雷达的主干工作模式。
3 电子扫描雷达信号主干工作模式提取方法
对于来自同一部雷达的两个信号脉冲序列来说,采用的是同一种主干工作模式脉冲序列,这是相同序列提取的基础;而且在不同时间段中雷达跟踪目标的脉冲序列的时刻和跟踪时间长度也不相同,甚至,在未能够提取出搜索模式的前提下,哪一种是搜索脉冲序列信号,哪一种是跟踪脉冲序列信号都是未知的。
文献[2-3]都对两个序列进行了时间对准和顺序调整,但在实际应用中,比对的两个序列中的搜索序列不一定是式(3)的整数倍的重复,序列的对准难以实现,不仅占用计算资源和计算时间,而且意义不大。
3.1 序列搜索模式提取
对两个序列进行搜索序列的提取就是对公共序列进行提取,即在两个序列间寻找最大数量的相同序列。Needleman-Wunsch算法是一种全局比对的动态规划算法,本文采用该算法对公共序列进行提取。
3.1.1 建立打分矩阵
打分矩阵是下一步对序列进行匹配打分的标准,作为对称矩阵,打分矩阵的行和列对应于两个序列中的模式和一个空位,矩阵中的每个元素表示该位置的对应行状态与对应列状态配对的得分情况。假定得到的两个雷达信号序列为
(7)
由式(7)可见,共有6种不同的雷达工作状态,则建立打分矩阵W7×7,即
(8)
由式(8)可以看出,工作状态相同时得1分,不同时得0分,“-”表示空位,任何与“-”匹配的均得0分,而空位与空位匹配没有意义,因此也为0分。
3.1.2 计算匹配得分矩阵
以一条序列e1作为得分矩阵的行,另一条序列e2作为得分矩阵的列,建立得分矩阵,并在矩阵的第一行和第一列对应位置添加一行和一列空位的得分,得分矩阵可以表示为
SScore=(si j)m1×m2
(9)
式中:sij为序列e1的前i项与序列e2的前j项的匹配得分,计算方法为
si j=max{s(i-1)(j-1)+w(e1(i),e2(j)),
s(i-1)j+w(e1(i),-),
si(j-1)+w(-,e2(j))}
(10)
式中:w(A,B)表示在打分矩阵W中,行为A,列为B的元素的值。通过计算得分矩阵SScore得到了两个序列之间在不同的空位插入方式中的得分。
通过上述步骤的计算,得到序列e1和序列e2的得分矩阵为
(11)
3.1.3 提取公共序列
通过计算得到的得分矩阵表示两个序列在给定打分标准下、不同空位插入时的匹配得分。如式(11)中,最优得分为矩阵中的最大值5,因此,以最右下角的5为起始点,开始确定两个序列的空位插入情况。
在确定两个序列时,遵循以下的原则:
1) 以最右下角的最大值点为起始点;
2) 每次选择该点的左侧、上侧、左上侧3个点中的最大值点作为下一个点;
3) 一直跳跃到矩阵的最左上角;
4) 矩阵中每次横向跳跃表示在左侧序列中对应位置后加入一个空位,同理每次竖向跳跃表示在上侧序列对应位置后加入一个空位。
确定完两个序列后对应位相同的就是两个序列的公共序列,如图3所示。

图3 公共序列提取Fig.3 Common sequence extraction
由图3可知,序列e1转换为
(12)
序列e2转换为
(13)
公共序列为对应位相同的序列e3=CDABC。
3.2 识别算法性能评价
本文识别算法的基础为两个待比对序列具有相同的搜索模式序列,而评价标准也就是识别出来的搜索模式序列与原搜索模式序列的相似程度。待比对序列中还会含有随机的跟踪序列,这是两个序列的不同之处,同时也会使得算法识别出的搜索模式序列存在一些错误。因此本文以搜索序列相似度Pm和误识别率Pf两个标准衡量算法的识别效果,即
Pm=M/L
(14)
(15)
式中:M表示对算法识别出的搜索模式序列循环移位,得到的与原搜索模式序列相同个数的最大值;N表示算法识别出的搜索模式序列的个数,L表示原搜索模式序列的个数。因为算法识别出的序列的起始位置与原序列的起始位置不一定一致,因此在计算M时需要对其进行循环移位。
搜索序列相似度Pm描述了算法对搜索序列的识别能力;误识别率Pf则描述了算法识别的准确度。
4 仿真分析
仿真实验研究电子扫描雷达搜索序列类型固定,跟踪模式数变化的识别效果。
实验选定序列的搜索模式有8个,分别对5种跟踪模式情况进行对比实验,这5种情况包括:跟踪模式类型数为4,6,8,10,12。计算搜索序列相似度Pm和误识别率Pf,得到的仿真实验结果如图4、图5所示。
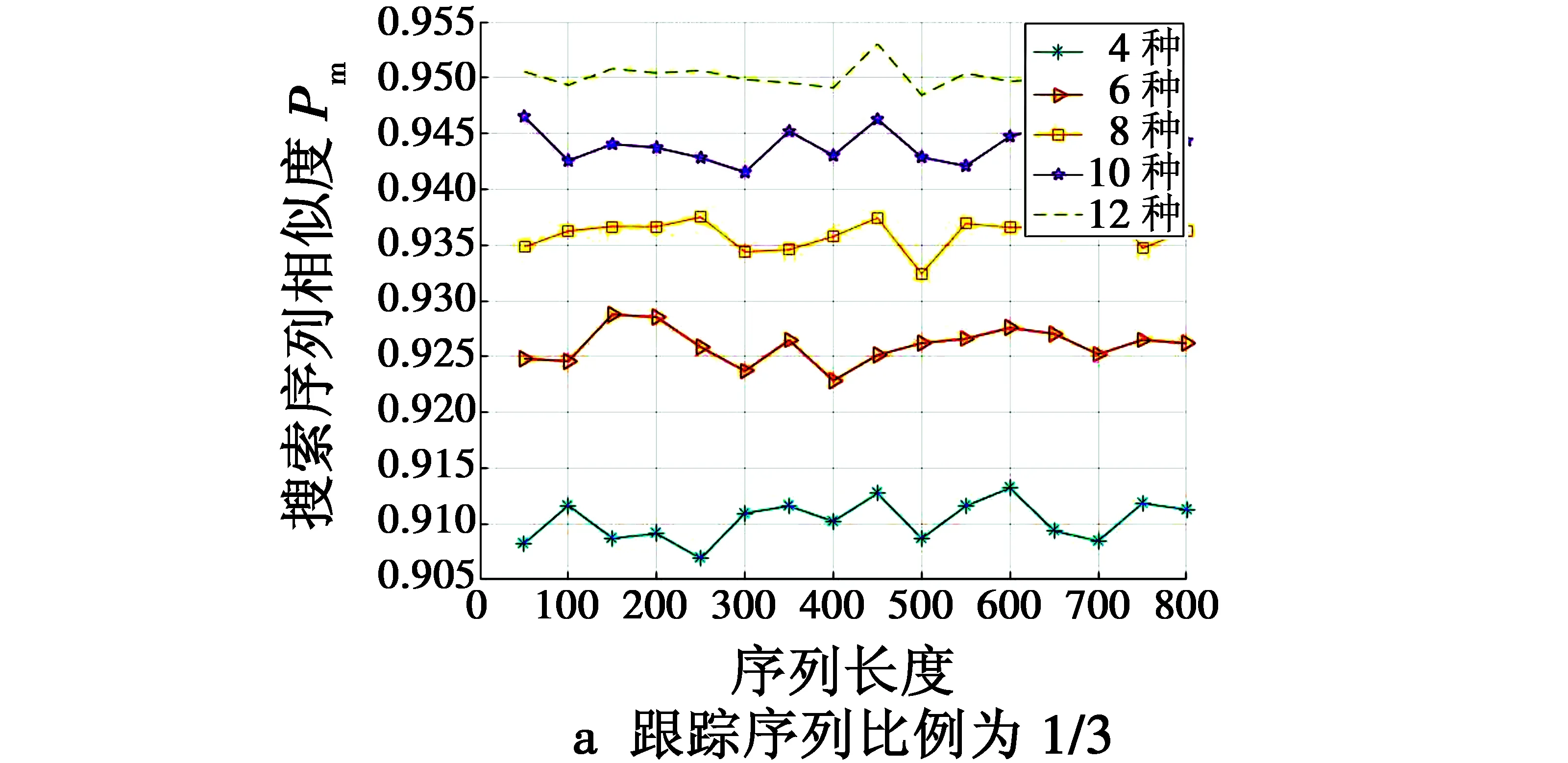
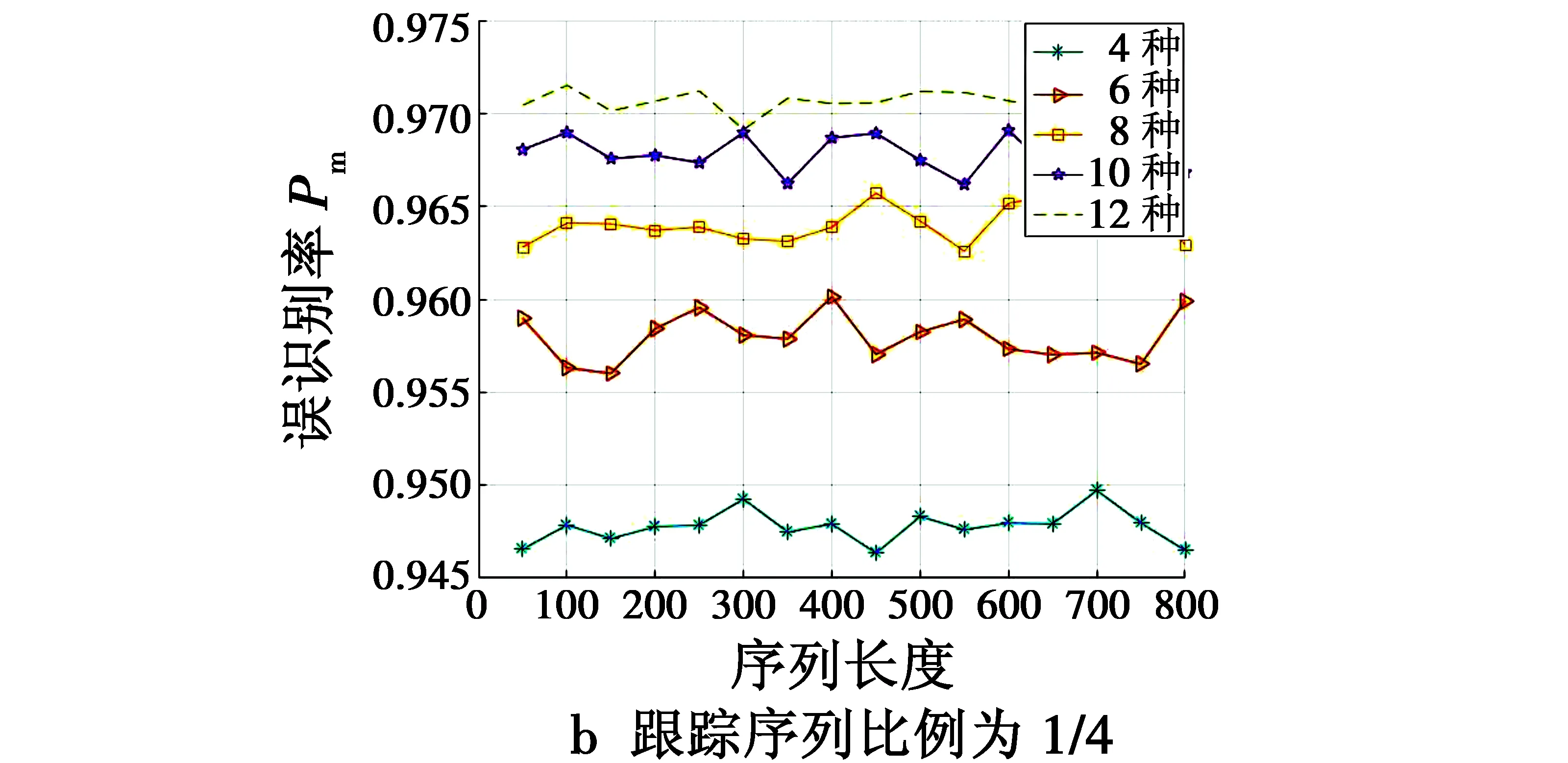
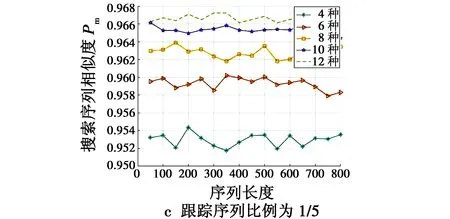
图4 不同跟踪序列比例下的搜索序列相似度Fig.4 Sequence similarity under different rates of tracking sequence
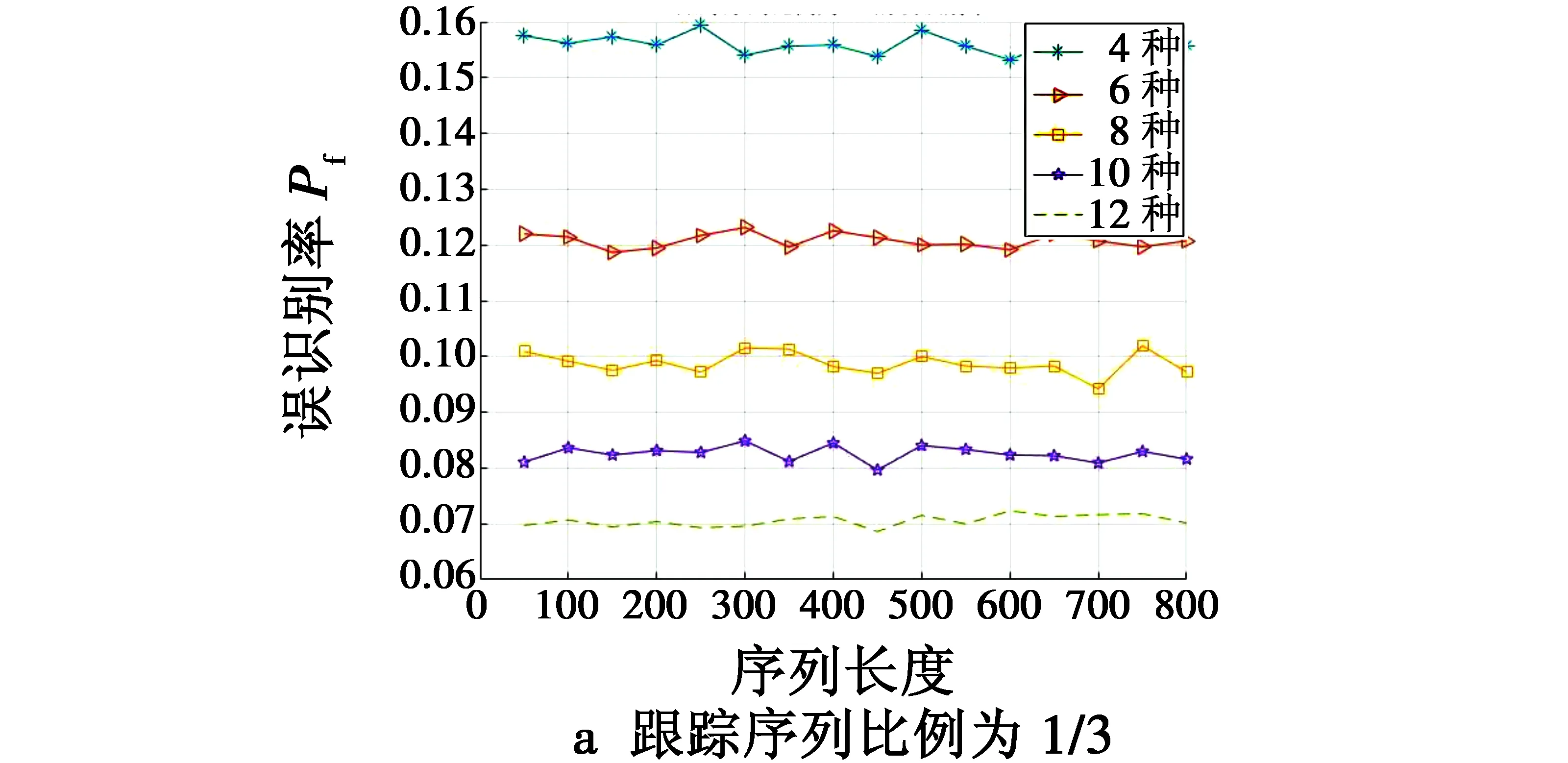
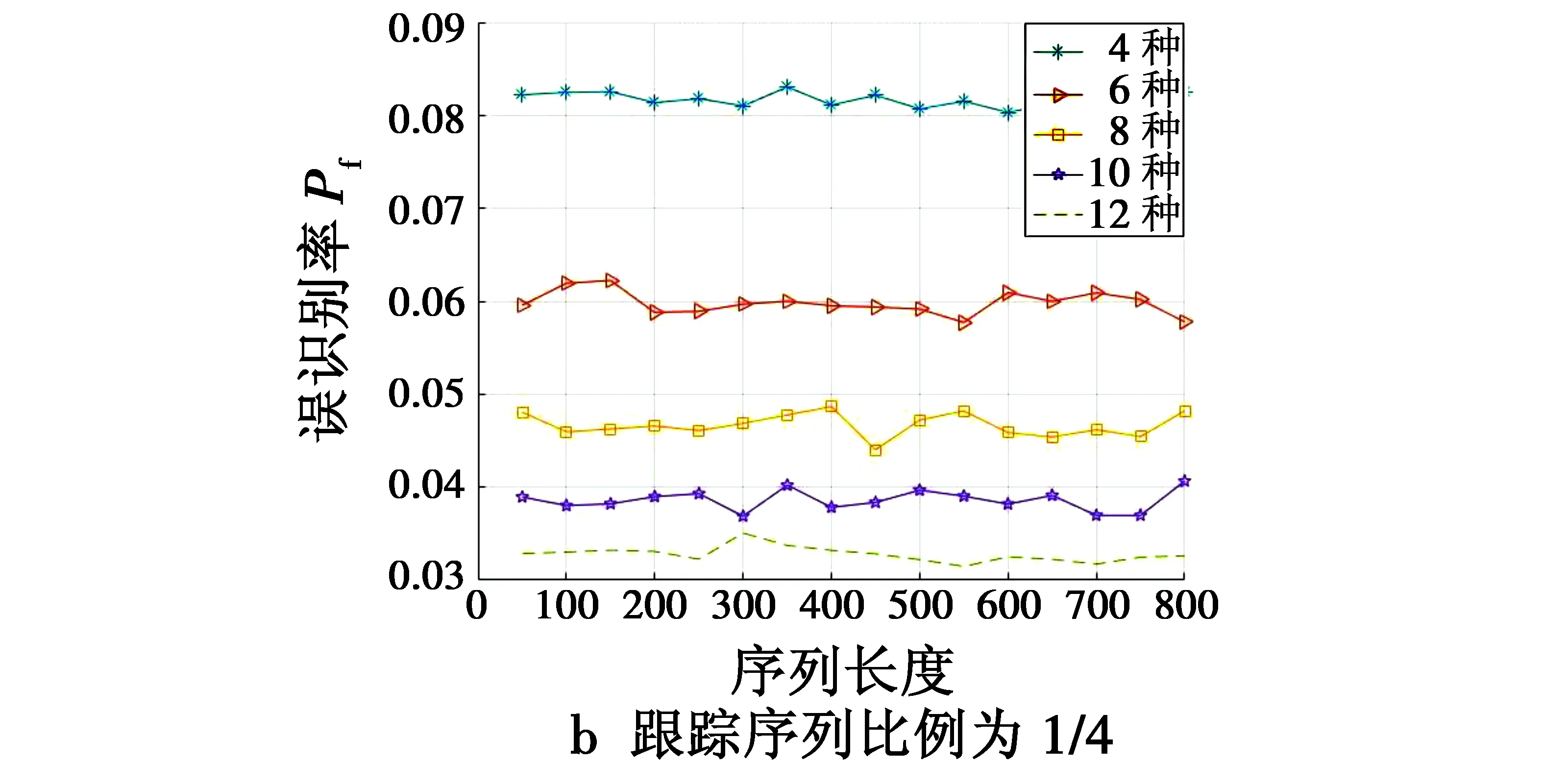

图5 不同跟踪序列比例下的误识别率Fig.5 False recognition rate under different rates of tracking sequence
由以上仿真实验结果可以看出,搜索序列相似度Pm均在90%以上,而误识别率Pf控制在了16%以下。
由图4和图5对比可知:在待对比序列的搜索模式序列类型一定时,序列长度对搜索序列相似度Pm和误识别率Pf几乎没有影响;而在跟踪模式比例一定时,跟踪模式的类型数越多,识别的序列相似度Pm越高,误识别率Pf越低;在跟踪模式的类型数一定时,跟踪模式比例越低,识别的序列相似度Pm越高,误识别率Pf越低。这是由于同样跟踪模式比例下,跟踪模式类型数越多,跟踪模式相同的机率就越低,从而使得序列相似度Pm越高,误识别率Pf越低;而跟踪模式类型数相同时,跟踪模式比例越高,跟踪模式相同的机率就越高,使得序列相似度Pm越低,误识别率Pf越高。
5 结束语
本文分析了电子扫描雷达的工作过程和状态转换,通过对两个来自同一个雷达辐射源的状态转换序列进行公共序列提取,识别电子扫描雷达的主干工作模式序列,实现对电子扫描雷达工作模式的识别,并通过仿真分析研究了影响序列相似度Pm和误识别率Pf的因素。
猜你喜欢
航天电子对抗(2021年2期)2021-05-31
计算机工程(2020年3期)2020-03-19
电子制作(2019年15期)2019-08-27
中国听力语言康复科学杂志(2019年3期)2019-06-24
小学生学习指导(低年级)(2018年12期)2018-12-29
中国交通信息化(2018年3期)2018-06-13
电子学报(2016年12期)2017-01-10
中国交通信息化(2016年2期)2016-06-06
火控雷达技术(2016年3期)2016-02-06
百科探秘·航空航天(2015年4期)2015-11-07
