
60°坐标系下三电平感应电机SVPWM算法
2018-11-16 07:00
传感器世界 2018年5期
北京信息科技大学,北京 100192
一、引言
近年,多电平技术在感应电机矢量控制调速系统得到广泛的应用,其中三电平逆变器SVPWM控制算法成为重点研究对象。传统三电平逆变器控制方法采用基于正交坐标系的SVPWM算法[1],在参考电压矢量的合成计算时涉及了大量三角函数运算,造成计算机大量运算内存被占用,导致运算效率下降[2]。
本文依据各电压矢量角都是60°的特点,建立新的坐标系,从而缩短矢量合成和作用时间上的运算时间,实现了转速快速控制,最后通过在MATLAB仿真试验平台搭建模型,并使用基于TMS320F2812型DSP运动控制系统实验平台对算法可行性验证。实验结果表明,这种方法避免了大量函数运算,减少了控制系统计算时间。
二、矢量控制系统60°坐标系下SVPWM 算法实现
1、矢量控制
矢量控制将测量得到的感应定子电流经坐标变换,分解为产生磁场的励磁电流分量和产生转矩的转矩电流分量,同时进行幅值和相位控制,即通过控制定子电流矢量,从而达到控制感应电动机转速的目的[3]。
2、坐标变换
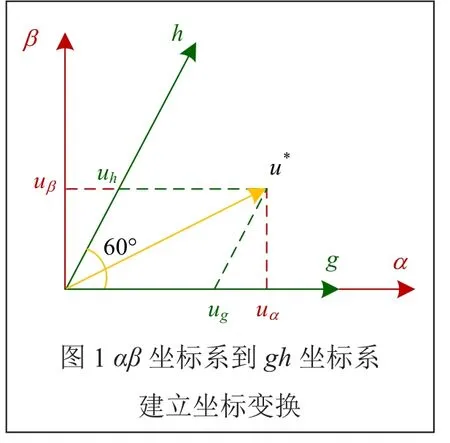
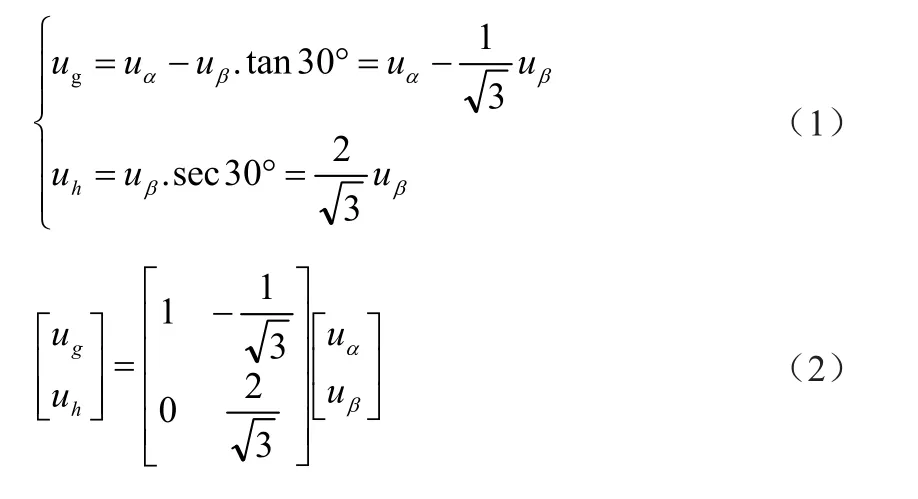
选择g轴与α轴重合,g轴逆时针旋转60°做h轴,建立起60°坐标系,如图1所示。则gh坐标系与αβ坐标系的变换关系为:
设u为参考电压矢量,三相电压为u(uA uB uC),(uα、uβ)为αβ坐标轴下的分量,(ug、uh)为变换到gh坐标轴下分量。
通过Clark变换得到gh坐标与ABC坐标的变换关系为:
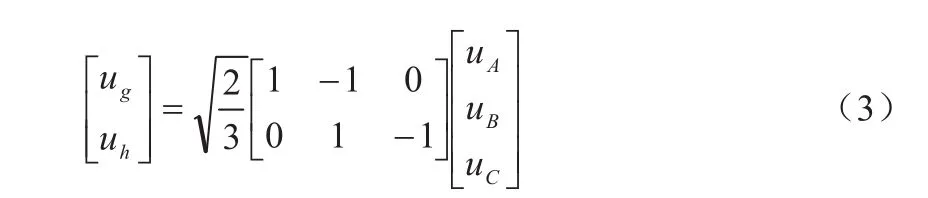
化简后得到:
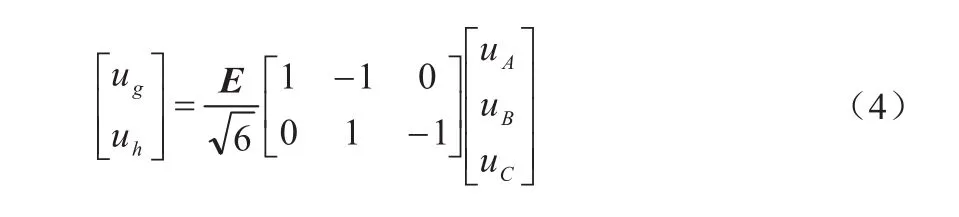
其中,E—单位矩阵。
3、参考电压矢量定位
参考矢量所在的正方形通过取整运算确定[4]。图2中A、B、C、D点为参考矢量N于g、h坐标分别向下取整,所在正方形的4个顶点坐标为:
A点坐标
B点坐标
C点坐标
D点坐标
再确定参考矢量在正方形中所处的三角形区域。当gN+hN≤gB+hB,参考矢量在下半部分三角区域,当gN+hN>gB+hB,则参考矢量位于上半部分三角区域[5]。
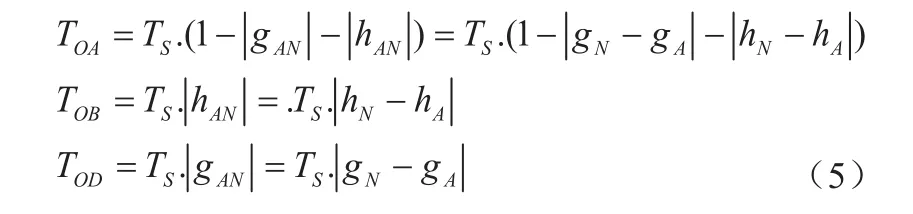
4、合成矢量选取及作用时间的计算
以下三角为例,计算合成参考矢量ON的各矢量作用时间,上三角矢量合成类似。
从以上参考矢量扇区的判断和矢量作用时间计算的方法可以看出,与传统算法相类似,但60°坐标系SVPWM 算法在计算难度和复杂度方面都有所降低,若应用于工程,在软件上实现,可提高计算的精确性与实时性[6]。
三、仿真系统设计
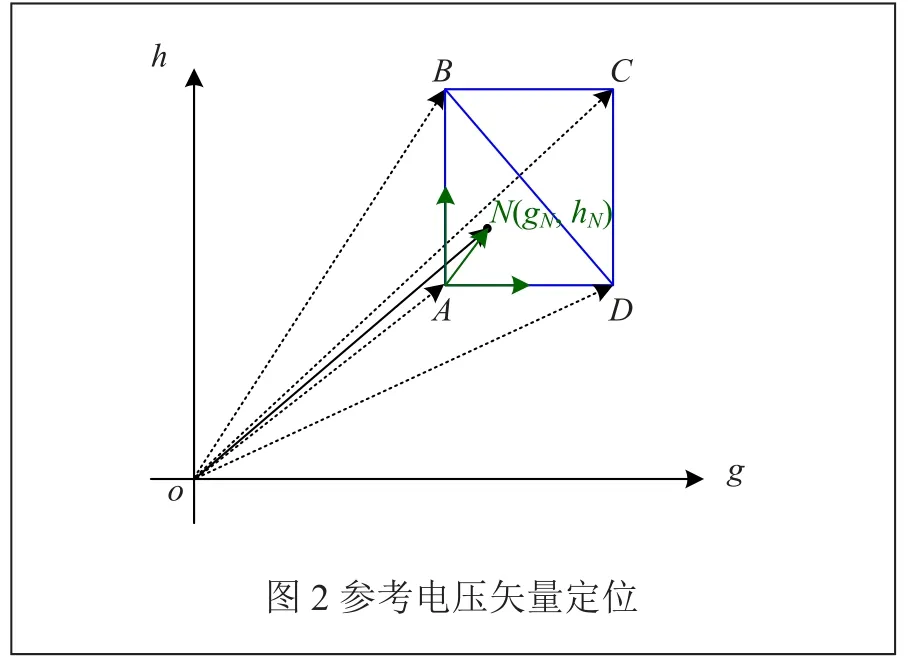
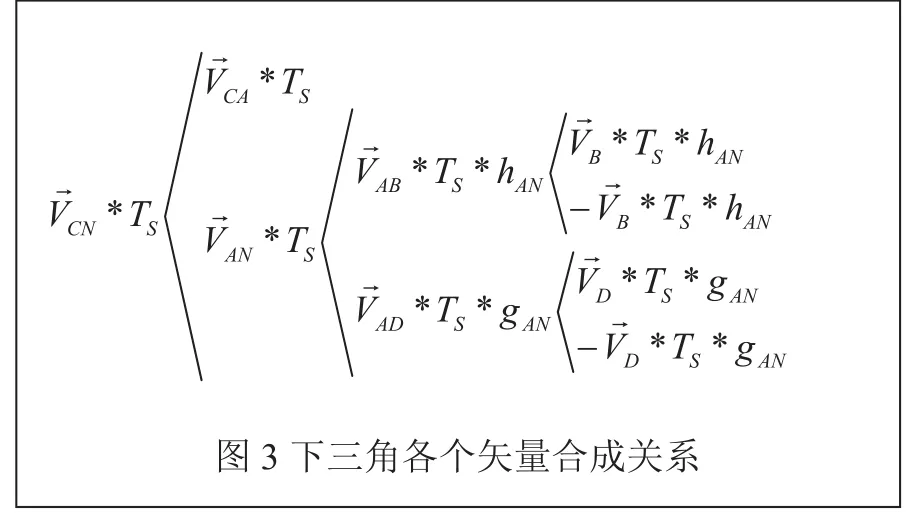
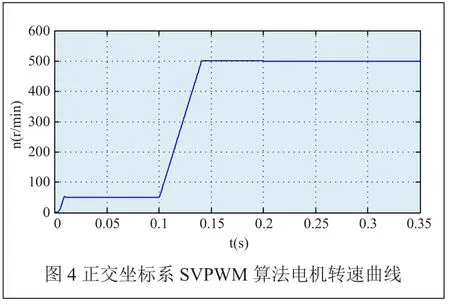


表1 实验数据分析
在Simulink仿真环境下进行验证试验,设定感应电机参数如下:极对数4,定子电阻Rs=4.7Ω,dq轴电感Ld=Lq=L=7.8mH,转子磁动势Ψf=0.215Wb,转动惯量J=0.8×10-4kg·m2。
实验设定系统给定转速在0.5s时从100r/min跳变到600r/min,转矩在0.1s时跳变到10N·m。图4为电机采用正交坐标系下的SVPWM算法获取的转速曲线,图5为电机采用60°坐标系下的SVPWM算法获取的转速曲线。
图4和图5的仿真实验结果,验证了60°坐标系下三电平感应电机SVPWM算法的有效性,在转速和转矩突变时,具有很好的跟踪效果,且在相同的实验条件下与传统SVPWM算法相比,实际运行时间明显缩短。综合上述仿真实验结果表明,采用60°坐标系三电平感应电机SVPWM算法,不仅降低了模型的复杂性,缩短了系统的调节时间,且在稳定时可以达到很高的精度,具有很好的实际应用价值。
四、硬件电路设计
1、硬件平台
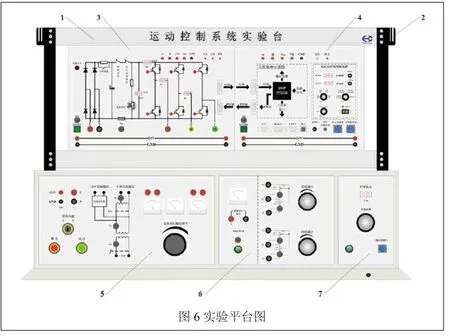
为进一步验证控制策略的有效性,在运动控制系统平台上编写了感应电机转速闭环控制的SVPWM算法程序,并进行调试。电机实验平台被控对象是一台功率为200W的感应电机,实验平台如图6所示。本平台是eMCP1000N运动控制系统实验装置,实验平台所选用的三相感应电机的主要参数包括:额定功率:90W;额定电压:220VAC;额定电流:0.68A;额定转速:1420rpm;额定转矩:0.4N·m;功率因数:0.6;连接方式:角接法。
2、程序设计
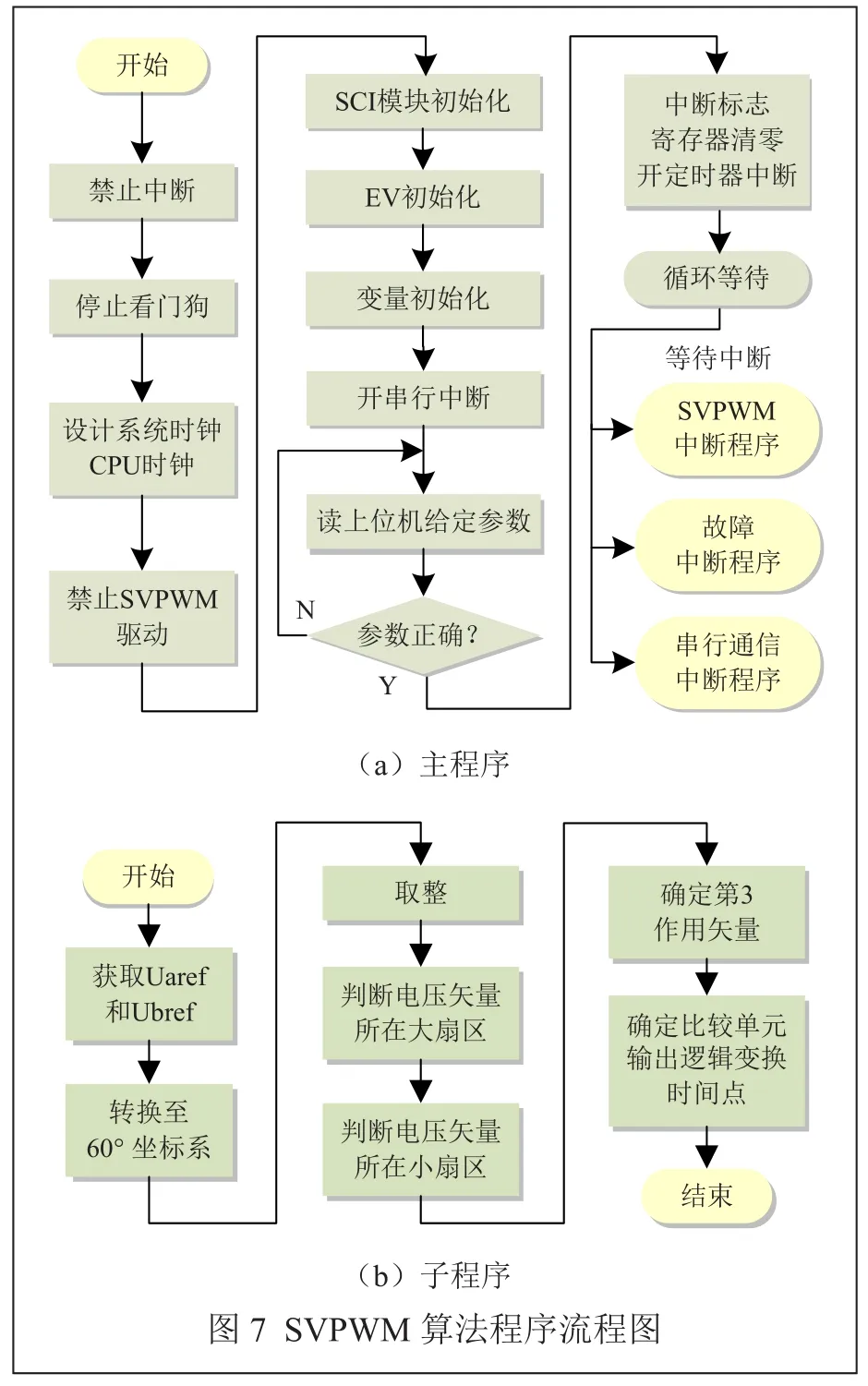
主程序主要完成对系统寄存器、时钟、外设接口等的初始化设置,之后对电机转子初始位置进行检测,在得到转子初始位置后,进入中断等待状态[7]。一旦检测到外部产生中断信号时,系统就会进入相应的中断服务子程序对电机进行控制[8]。
在中断子程序中,启动A/D转换,实现对电流和速度检测,电流检测后进行坐标变换,其中,坐标变换用到的三角函数值通过查表获得[9]。电流反馈值与给定值比较后,偏差通过电流环控制器输出系统所需的电压ud、uq,最终实现SVPWM算法。主程序流程如图7(a)所示,SVPWM算法子程序如图7(b)所示。
五、实验结果
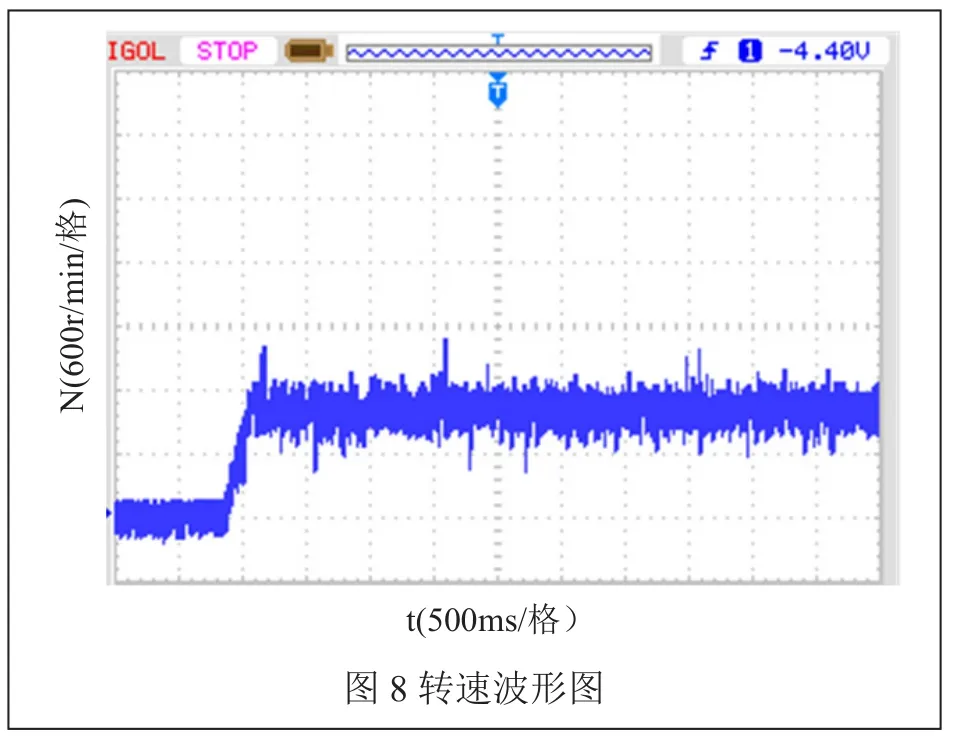
在电机实验平台上,设定电机转速为600r/min,在某一时刻负载转矩从0.06N·m变为0.15N·m时,采用速度闭环控制策略,基于C语言编写算法程序。运用基于正交坐标系下的SVPWM矢量控制算法对交流异步电机进行转速控制实验,图8和图9分别为得到的电机实验曲线结果。
通过图8转速曲线,可以看出程序的有效性。系统在稳定时,转速趋于稳定,说明此算法可以很好地对电机进行控制。图9中检测到的PWM驱动信号上下两路互补。为了使IGBT工作可靠,避免上下桥臂直通,设置了死区时间,因此输出波形并不完全对称。
六、结论
通过上述分析和实验结果验证了基于60°坐标系SVPWM算法的可行性。同时通过多电平逆变器结合60°坐标系SVPWM算法与感应电动机调速系统进行组合应用,一方面简化了计算步骤,另一方面还提高了计算准确度,满足了工程需要。该算法能为电机的控制算法提供新的思路,满足实际控制系统需求。

猜你喜欢
防爆电机(2022年2期)2022-04-26
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
现代防御技术(2016年1期)2016-06-01
电测与仪表(2016年5期)2016-04-22
电测与仪表(2016年5期)2016-04-22
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年10期)2016-04-12
电测与仪表(2016年22期)2016-04-12
新高考·高一物理(2016年1期)2016-03-05
