
错位悬挂式自行车停放系统的设计开发*
2018-11-13 10:06,,,,,,
现代机械 2018年5期
, ,,,,,
(佛山科学技术学院机电工程学院,广东佛山528000)
0 引言
随着绿色出行、低碳以及健康生活的倡导,特别是随着共享单车的推广应用,自行车成了人们短距离出行,特别是最后一公里出行的首选方式,也成了除散步外健身锻炼的一种主要方式之一。自行车虽给人们出行带来了便利,但自行车无处停放、随处乱停已严重影响了人们的生活,同时自行车的安全问题如丢失现、日晒雨淋、使用寿命短等也成了一个亟待解决的难题[1-5]。
自行车停放装置的发展在国外尤其在日本已有几十年的历史,在技术上已获得了成功[6-7]。机械式自动停车装置与传统的停车方法相比,具有更多的优越性。首先,自动停车装置具有突出的节地优势和更高的空间利用率,传统的平放停车方式所占的用地面积,如采用双层甚至多层停车装置,可使地面的使用率提高80%~90%,如果采用高低错位式立体停车装置的话,3.6 m2的土地面积上便可存放18辆自行车;其次,由于其具有全封闭性,可更加有效地保证人身和车辆的安全,有效地防止了车辆被偷盗和丢失的可能性,停车设备运转,停车装置从管理上可以做到彻底的人车分流。
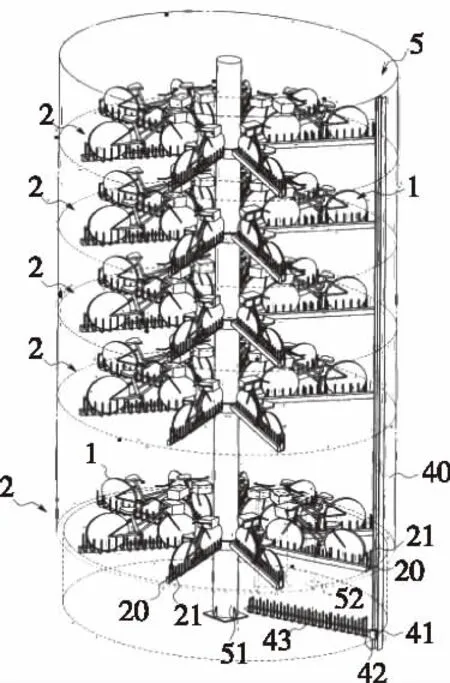
图1 水平式停放装置
目前,国内外的汽车停放装置层出不断(图1和图2)[8],但相对来说,自行车停放装置较少(图3)[8],而我国也初步在一线二线城市发展起自行车停放装置,但总体情况还是不够成熟。

图2 循环式停放装置 图3 新颖式自行车停放装置
1 系统构思

图4 错位自锁式自行车停放装置
为了有效地提高空间利用率,参照现有的汽车和自行停放方案,我们提出了采用垂直交错停放方式来停放自行车,其结构如图4。和现有水平停放方式相比较,由于垂直错位式在相同的占地面积上可以停放更多的自行车,而和循环停放方式比较,控制方法简单成本较低,与新颖式停放系统比较,采用全封闭结构,自行车的安全和寿命得到了保证。
该系统由机械部分和控制部分组成。机械部分采用导轨滑块的形式,以主轴底盘进行旋转换位,用电力小车来驱动停放的自行车沿导轨上的停车架移动以达到指定位置,为了保证每辆自行车之间的横向距离充分使用,进一步节省空间,采用了高低错位方式来进行自行车的停放。当自行车达到指定位置后,由于是垂直式停放,所以一定要有稳定的锁定机构,参照脉动式机芯结构,本设计创新性使用了机械自锁的方式来稳定垂直停放的自行车。
控制部分采用PLC可编程控制方式,PLC可编程控制成本比较低,操作简单,运行稳定,而且维修费用较低。利用PLC可编程控制可实现停车装置的机械自动化,使停车装置能够自主智能地在简单操作下实现停车与取车。
2 机械部分的设计
2.1 系统构成
该系统的机械装置主要有高低错位底盘结构(图5)、推进系统结构(图6-图9)、辅助系统结构(图10、图11)三大部分组成。高低错位底盘结构是一个圆盘形状结构,可直接停放和承载自行车,并且能有效的提高利用率;推进系统包含导轨及停车架(图6)、自锁结构(图7、图8)、动力小车(图9)三个部分组成,其中导轨结构主要为可相互滑动导轨和停车架;停车或取车时,动力小车沿着导轨推动停放在停车架的自行车向前运动,运动到一定位置时触发自锁结构,完成自锁与解锁步骤,实现自行车固定或者松开在导轨上的功能;辅助系统结构由六杆自动门机构(图10)和曳引轮机构(图11)组成,六杆自动门机构起安全保护作用能防止自行车被盗,曳引轮机构起升降的作用,使整个自行车停放装置能够实现多层层叠停放的效果。
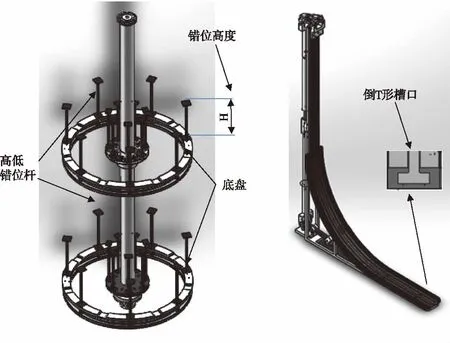
图5 高低错位底盘结构 图6 导轨
2.2 高低错位底盘结构设计
该机构(图5)主要是将自行车停放在一个带有停放架转动的底盘上,并将自行车按一定的旋转角度高低错位均匀的分布在底盘上。由于自行车自身的结构限制,使自行均匀停放在底盘的时候会留有很大的间隙。为了提高自行车停放时的空间利用率,采用了一个高低错位的结构,在同一个转盘上面利用高低错位的方法停放两层自行车,这就可以很好地利用单层停放的间隔空间。其主要参数是:错位的距离和高度,距离和高度太大会降低空间的利用率,太小自行车在停放的运动过程中产生相互干涉现象。根据自行车整体的外形结构和停放在停放架时的位置状态,最后通过多次仿真分析的结果不断优化得到合适的高度和距离。
2.3 推进系统结构设计
2.3.1 导轨的设计
现有的自行车停放装置主要有两种方式:一是直接在地面停放,二是多层平放。显然,第二种方式能在单位面积的地面上停放更多的自行车,其缺点是比较庞大。在此我们利用多层悬挂的方式,通过一定倾角交错放置的导轨(图6),自行车停放到导轨的停车架上和导轨一起交错挂到装置上,以减少水平占地面积。导轨截面形状为T形槽,停车架下有T形滑块可以在导轨的T型槽内滑动,既能防止滑块从导轨中脱落又可有效减小小车在推动过程的阻力和损耗。
2.3.2 自锁结构
在设计停车架时,为了保证其在导轨上滑行又能够固定倾斜放置的自行车和停车架,因此应设计一个自锁装置,该装置具有以下功能:①停车时能将倾斜放置停车架固定住,防止自行车下滑;②在取车时能解锁,使自行车能沿着轨道滑动下来。
现有的自锁方式主要有:电磁铁和机械结构两种方式,两者各有优势:电磁铁的优势在于可以通过通/断电操作来操控磁性的有无,便于停取车;机械结构的优势则是在于零部件使用寿命长,使用的性能稳定,不需要经常更换。考虑到整个停车结构的安全性和稳定性,在此选用可靠度更高的杠杆传动机构(图7)和脉动式机芯结构(图8)共同实现自锁功能。

图7 杠杆传动机构 图8 脉动式机芯结构
脉动式机芯结构在运动过程中会在高位和低位循环,杠杆传动机构可以改变力的方向。我们选择上下两个杠杆传动机构来改变力的方向,并结合滑块使用,将旋转运动变为直线运动。根据杠杆平衡的相关公式,通过调节杠杆支撑点的位置,来对所需的主动力的大小进行调节。上杠杆传动机构(图7)我们放在导轨上端,下杠杆传动机构(图7)放在导轨支撑架下端、靠近导轨背面的平面处。当动力小车沿着导轨推动停放在停车架的自行车向前运动到一定位置时,停车架前端会推动上杠杆传动机构,并触发脉动式机芯结构,利用脉动式机芯结构的行程差控制下杠杆传动机构将力传导到阻挡推块,实现阻挡推块的上升和下降,完成自锁与解锁步骤,以达到将自行车固定或者松开的目的。假定初始为解锁状态,则每一次触发将会使该结构处于“锁定—解锁—锁定—解锁”的循环状态。
2.3.3 动力小车设计

图9 动力小车
动力小车(图9)的设计包含机械结构和动力系统的设计。其机械结构设计主要是为了解决停车过程中自行车和停车架从水平位置运动到停放位置时的干涉问题;动力系统设计是给动力小车提供动力,在此采用停靠充电系统,同时可有效解决动力小车运动过程中的线缠绕问题。
动力小车除了要完成把自行车推到倾斜停放的位置之外,还要沿着轨道再前走一段路程触发脉动式机芯结构,而当自锁机构被触发时,自锁机构下方用来阻挡自行车下滑的阻挡推块就会上升,与小车的位置产生重叠,从而发生干涉,因此把小车的俯视外型设计成“凹字型”结构。动力小车在不工作的时候是停放在升降台末端,为避免停放时跨过小车而抬起自行车,把小车的结构设计成“凹字型”结构+“双向”斜坡形式,其动力来源采用电池驱动,其充电方式为停靠充电方法,由电机提供。
动力小车对电机要求如下:推动自行车及其停车板运动到轨道顶端触发自锁机构;当小车推动自行车运动到轨道顶端时,小车静止0.5~1s,即具有一定制动保持负载能力,因此可选择电磁制动电机。
2.3.4 辅助系统机构
除上述主要机构外,还有控制开关门的六杆机构(图10)以及起升降作用的曳引轮机构(图11)等辅助机构。六杆自动门机构中杆1是曲柄、2摇杆,它们用3杆、4杆5杆和机架构成反平行四边形机构,可实现两扇门的同时开合。曳引轮机构起升降的作用,通过钢丝绳牵引升降梯垂直运动,使自行车可以停放在错位的位置或第二层停放装置中。具体结构在此就不一一说明了。
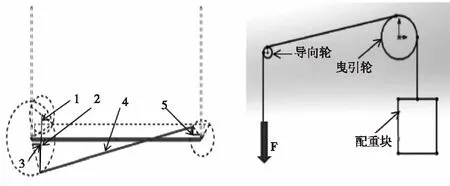
图10 图11
3 控制系统设计
现有的控制系统主要采用单片机控制和PLC可编程控制。PLC可编程控制成本比较低,操作简单,运行稳定,维修费用较低,并且停车装置的控制转移条件为行程控制,所以本设计使用PLC作为控制系统。
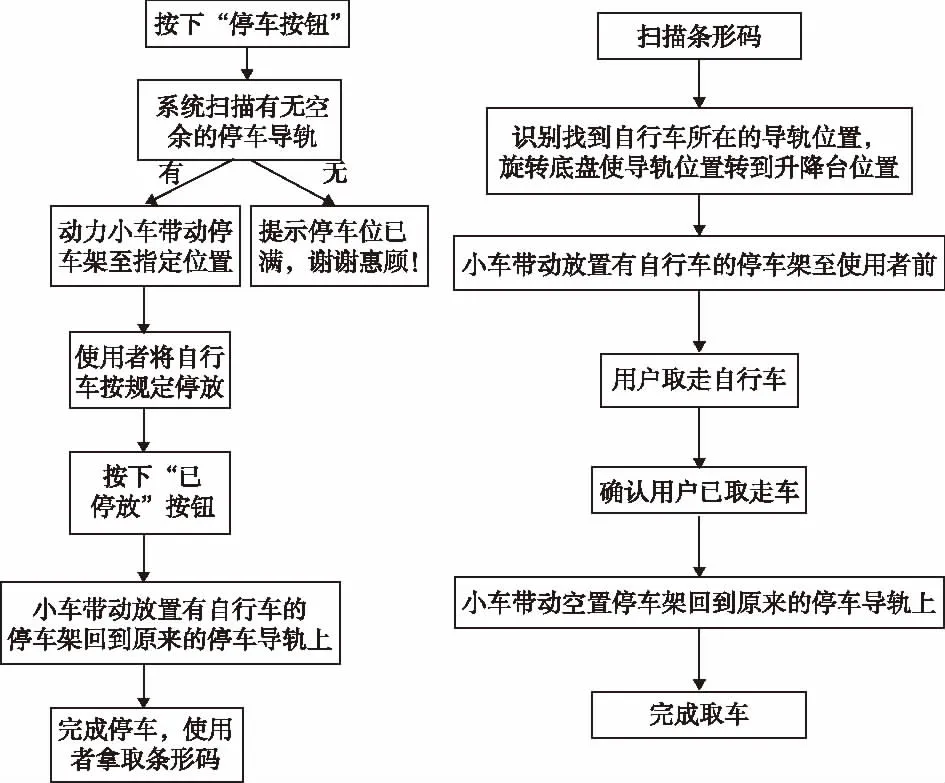
图12 停车流程图 图13 取车流程图
本系统的停车装置手动按键一共有四个,分别为停车,完成停车,取车,完成取车。以下分别为停车流程(图12)和取车流程(图13),既可以直接通过手动方式在装置上操作也可以通过手机进行控制,其停取车过程说明如下:
停车:在按下停车按键后,装置会自行启动,系统自行扫描空置的停车架,待停车架放下并且开门后,使用者方可进行停放自行车的操作。
停车完成:在完成停车操作后,使用者得自行闭合停放架上的锁,然后确保自行车停到指定位置后,可以按下停车完成按键,装置会自行把使用者的自行车停到指定停车轨道上,然后完成停车步骤。
取车:按下取车按键,停车装置会根据扫描器扫描到的条形码识别相应停车位的自行车,把使用者自行车取出至停车架上,供使用者取回自己的自行车。
完成取车:使用者取车完成后,可以按下完成按钮,动力小车将自行把停车导轨带回既定停车位上,装置和程序复位。
控制系统程序框图如图14。
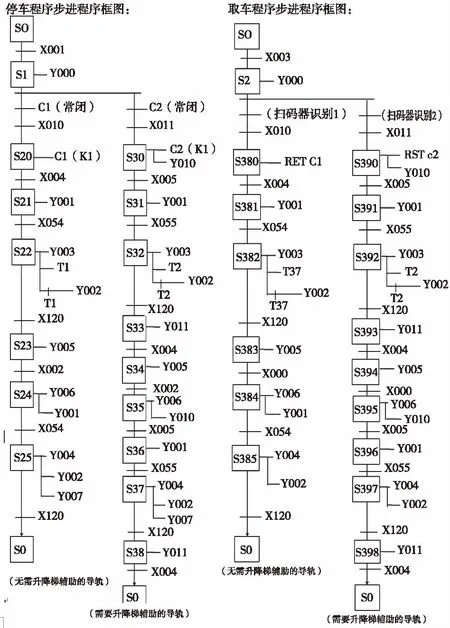
图14 控制系统程序框图
5 结论
错位悬挂式自行车自动停放系统采用高低错位悬挂的停放方式,能有效地提高空间利用率,解决现阶段自行车停放过程中出现的杂乱、占地现象,并且对其中的高低错位底盘结构、推进装置、脉动式机芯机械结构、动力小车和停车导轨及停车架等进行了设计,并利用PLC对其控制系统进行了设计,后面搭建了模型进行了模拟,整个装置的性能可靠,但动力小车以及停车架等结构设计还存在一定的问题,以及控制部分还没有与互联网相联,这些都是以后进一步改进和提升的方向。
猜你喜欢
中学生数理化(高中版.高考理化)(2022年3期)2022-04-26
煤气与热力(2021年5期)2021-07-22
奥秘(创新大赛)(2020年10期)2020-10-28
睿士(2020年3期)2020-04-22
中国特种设备安全(2019年7期)2019-09-10
模具制造(2019年4期)2019-06-24
新能源科技(2018年10期)2018-02-15
时尚北京(2017年1期)2017-02-21
新高考·高一数学(2016年3期)2016-05-19
制造技术与机床(2015年10期)2015-04-09
