基于动态RCS的隐身飞机生存力实时评估方法*
2018-11-13 05:54张小宽袁俊超吴盛源
火力与指挥控制 2018年10期
刘 袤,张小宽,袁俊超,吴盛源
(空军工程大学防空反导学院,西安 710051)
0 引言
隐身飞机作为实现重要目标空中打击、夺取和保持制空权的重要空中力量,其军事价值已经受到世界各国的广泛关注。随着雷达探测技术和防空反导性能的不断增强,隐身飞机受到的威胁越来越大,而其昂贵的价格使得我们对隐身飞机生存力的设计和综合评估提出了更高的要求[2]。
国内外关于飞机生存力的文献,大部分是对生存力进行定性的分析,或提出增强飞机生存力的措施,而定量计算飞机生存力概率的很少。文献[3]提出了一种基于作战能力的新的飞机生存力计算模型.从攻防结合的角度分析了飞机-威胁-生存力-作战能力之间的相互联系,但其雷达探测概率模型中设RCS为定值,未能体现RCS的起伏特性,不具有实时性,不符合真实的战场环境。本文提出一种基于动态RCS序列的飞机生存力概率计算模型,首先基于飞行动力学原理建立目标的三维机动航迹模型,解算出机动飞行时雷达视线角的变化,根据雷达视线角的变化情况结合全空域静态RCS静态库获取隐身飞机的动态RCS序列;最后结合起伏目标的检测原理,利用目标起伏模型计算雷达的瞬时检测概率,更符合实际问题。
1 隐身飞机的生存力
1.1 生存力基本概念
飞机生存力[4-5]定义为:飞机躲避和(或)抵抗人为敌对环境的能力。它的定量指标可用在一定的敌对环境中,在具体的遭遇条件下,飞机由于自身的易损性及敏感性所能获得的生存概率,通常以Ps来描述:

PD及PT分别为飞机被发现概率及被跟踪概率,PLGH为入射体(导弹、炮弹、激光束等)成功发射、制导且击中飞机的概率;PD、PT及PLGH的数值除取决于敌方雷达的探测能力、发射装置的效能、制导精度等以外,还取决于飞机的敏感性。PK/H为飞机被击中条件下的损毁概率。其数值除取决于入射体的威力、引爆系统的效能外,还取决于飞机自身的易损性。
1.2 生存概率模型
隐身飞机生存力的基本要素是敏感性和易损性[6-7],评估隐身飞机生存力可以用飞机生存概率来衡量。敏感性是关于隐身飞机被雷达发现和跟踪的概率,由基于动态RCS序列的雷达检测概率PD来衡量;易损性是关于隐身飞机承受打击的能力,用飞机在经受一次射击时被“击中且损毁”的概率PKSS来衡量。
对隐身飞机生存力的实时评估方法可用在一定的敌对环境及具体的飞机机动飞行过程中,隐身飞机以其自身的敏感性及易损性所能获得的实时生存概率来度量:

PD为雷达瞬时检测概率;PKSS为飞机单次射击击毁概率.要详细研究对飞机的杀伤概率,需要考虑武器的制导、引战配合特性,并对飞机致命性部件进行辨识和几何简化、严格分析射弹(破片)的分散特性以及射弹(破片)与飞机的交汇等情况,这些都不是本文研究的重点,因此,本文把威胁传播物对飞机的杀伤概率设为定值[8]。
2 雷达瞬时检测模型
2.1 动态RCS时间序列
2.1.1 目标坐标系的建立
目标坐标系定义为与目标机体相固联的坐标系,其原点O设在目标的几何中心,OXT轴沿目标纵轴为正方向;OZT轴位于目标对称平面内,向上为正;OYT轴构成右手坐标系。
2.1.2 全空域静态RCS特性数据库
本文采用电磁场仿真软件FEKO对某隐身飞机进行仿真,仿真条件:频段为L波段,入射角设为181×361全空域入射,角度间隔1°。目标零度方位面RCS和零度俯仰面RCS如图1、图2所示,零度方位面RCS表示俯仰角0°时,方位角从0°~360°目标RCS变化,零度俯仰面RCS表示方位角0°时,俯仰角从 -180°~180°目标 RCS 变化。

图1 零度方位面RCS

图2 零度俯仰面RCS
目标的全空域静态RCS如图3所示。观察图3可知,隐身飞机头部、尾部RCS较小,机腹、机背较大。
2.2 雷达目标视线角
如果已知目标的实时姿态、位置等信息,可以解算处目标的实时雷达视线角,求解算法如下:

在全空域静态RCS库的基础上,结合目标的实时雷达视线角,就可以解算出目标的动态RCS序列。
3 目标起伏模型
根据雷达方程可得最小可检测信号功率Simin:

式中,Pt为雷达发射功率;Gt为雷达天线的增益;为脉冲波长
雷达检测的能力实质上取决于信号噪声比的大小,典型的雷达接收机和信号处理框图如图4所示。
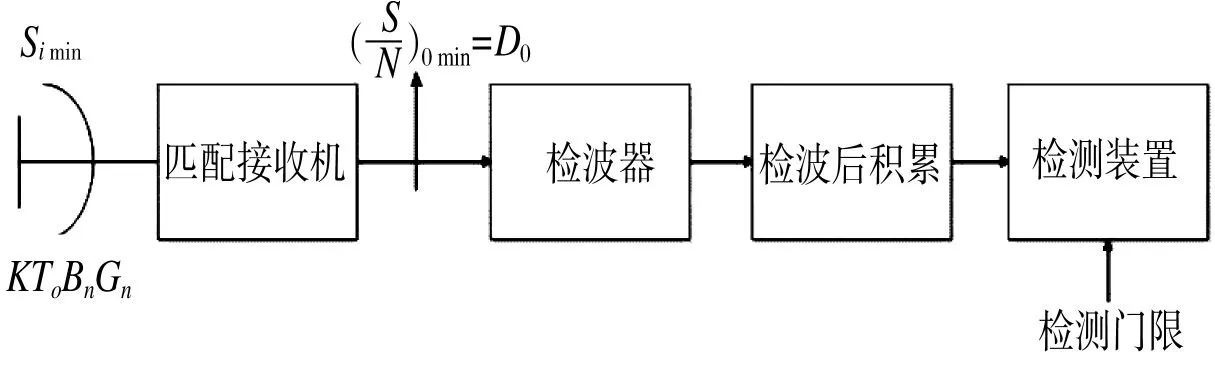
图4 接收信号处理框图
由最小可检测信号Simin可得:

Fn为接收机的噪声系数;Ni为理想接收机的输入噪声功率,对于给定雷达,上述这些雷达参数都是已知的,假设背景杂波服从高斯分布,经过平方律检波后,输入噪声功率Ni可以看成是一个常数。多个脉冲积累后可有效提高信号信噪比的大小,从而改善雷达的检测能力,考虑多脉冲相参积累,积累后信号信噪比为:

式中,np为相参积累脉冲数,当雷达天线机械扫描时,可由下面公式确定:

θα,0.5为半功率天线方位波束宽度;Ωα为天线方位扫描速度;fr为雷达的脉冲重复频率;θe目标仰角。当np确定时,积累信噪比SNR仅与目标散射截面积RCS和目标距雷达距离R有关。
Swerling把典型的起伏目标分为4种类型,其中第1类称SwerlingⅠ型模型,目标在一次天线扫描期内具有恒定的幅度,而不同扫描期间起伏幅度按照两个自由度的χ2概率密度函数独立变化,本文采取SwerlingⅠ型计算雷达检测概率。检测概率的公式为[8]:

4 仿真实现
本文采用低空水平急转弯机动和俯冲机动两种飞机突防常用的规避机动对隐身飞机进行生存力实时评估,仿真条件如下:1)低空水平急转弯机动:飞行高度300 m,飞行速度300 m/s,法向过载ny=5 g,坡度78°,转弯半径1 836 m,飞机初始距离雷达50 km,初始航路捷径为0。2)俯冲机动:飞行速度300 m/s,俯冲高度为10 km~1 km,俯冲角为60°。
两种规避机动飞行航迹如图5,图6所示。
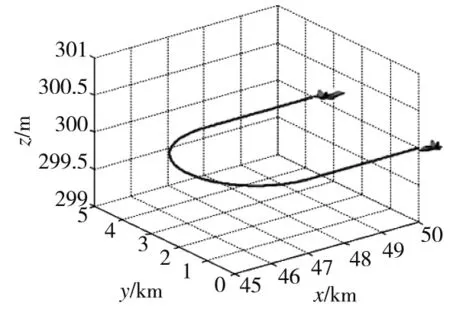
图5 低空水平急转弯机动飞行航迹

图6 俯冲机动飞行航迹
根据已建立的全空域静态RCS库以及雷达实时视线角可求出两种规避机动的动态RCS序列如图7、图8所示。
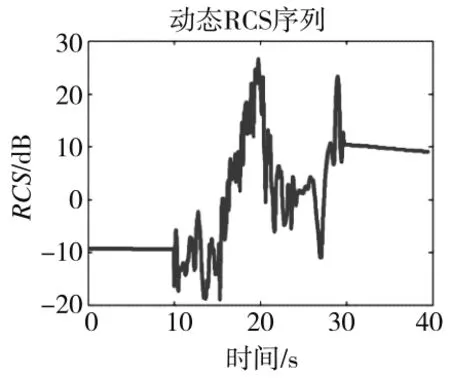
图7 低空水平急转弯

图8 俯冲机动
对图7中分析可知,在初始飞行时间10 s内由于机头对准雷达站飞行,头向RCS较小;10 s~30 s内飞机做水平急转弯机动,RCS出现较大波动,且雷达照射飞机机腹,RCS增加;30 s以后飞机离站飞行,雷达照射飞机的尾部,RCS较大。
对图8分析可知,在1 s~33 s内飞机处于10 km高空匀速平飞状态,雷达照射机头俯仰约91°的位置,RCS较小;33 s~43 s为进入俯冲段,当机动对准雷达站飞行时RCS迅速减小,摆动机头位置进行俯冲时RCS迅速增加;43 s~70 s为俯冲段,RCS变化较大。70 s~74 s为退出俯冲段,RCS迅速减小;74 s以后雷达处于低空平飞状态,雷达照射飞机机头位置,RCS较小。

图9 低空水平急转弯
图9给出了低空水平急转弯机动下实时的隐身飞机生存力概率,图10为俯冲机动下的生存力概率。对图9和图10生存力概率曲线分析可知,在不考虑其他威胁源的情况下,飞机RCS的变化成为影响生存力概率的主要因素,该生存力概率与动态RCS曲线对应,充分体现了隐身飞机规避机动时战场的实时生存力变化,这也是与实际相符的。
5 结论
本文建立了一个生存力概率模型,提出了基于动态RCS的飞机生存力实时评估方法,并且建立了两种典型机动模型并进行仿真,仿真结果验证了该评估方法的实用性和正确性。该研究为变化的战场环境下对飞机进行生存力评估提供了理论参考,具有一定的实用价值。
猜你喜欢
苏州科技大学学报(自然科学版)(2022年2期)2022-06-18
西北工业大学学报(2021年3期)2021-07-12
军民两用技术与产品(2021年10期)2021-03-16
军民两用技术与产品(2021年10期)2021-03-16
环球时报(2021-02-01)2021-02-01
矿产勘查(2020年3期)2020-12-28
科技视界(2020年8期)2020-05-18
北京航空航天大学学报(2017年9期)2017-12-18
振动工程学报(2017年2期)2017-06-05
南方文学(2016年3期)2016-06-12