输电线路无人机巡检系统的设计
2018-11-12 02:31郭昊坤
常州工学院学报 2018年4期
郭昊坤
(江阴职业技术学院电子信息工程系,江苏 无锡 214405)
为保证电力系统正常运行,必须对电网输电线路进行监测与巡检[1-6]。然而在一些自然条件相对恶劣的地区,如峡谷、大山、森林、大河、沼泽、湿地等,若采用人工巡检的方式,对工作人员来说工作强度大、条件差、效率低且存在较大安全隐患[7]。近年来,为提高输电线路的巡检效率,多数供电公司对自然条件恶劣、不适合人工巡检的区段采用了无人机巡检的方法,收到了较好的效果[8-10]。本文设计了一种输电线路无人机巡检系统,该系统由一个移动监测站、数个无人机飞行器以及后台上位机构成,具有机动灵活、稳定性好、便于操控、传输实时准确等特点。
1 总体方案设计
输电线路无人机巡检系统组成主要包含两大部分:多旋翼无人飞行器系统(unmanned multi-rotor system, UMRS)和地面站系统(ground station system, GSS)。该系统组成如图1所示[11]。本文所设计的输电线路无人机巡检系统,将地面站系统改为移动监测站系统,移动监测站根据实际情况分为地面移动监测站与空中移动监测站两种。另外,还设置了后台上位机系统,以便后台工作人员也能及时了解现场情况,并对现场工作人员难以决断的复杂问题及时提供解决方案。
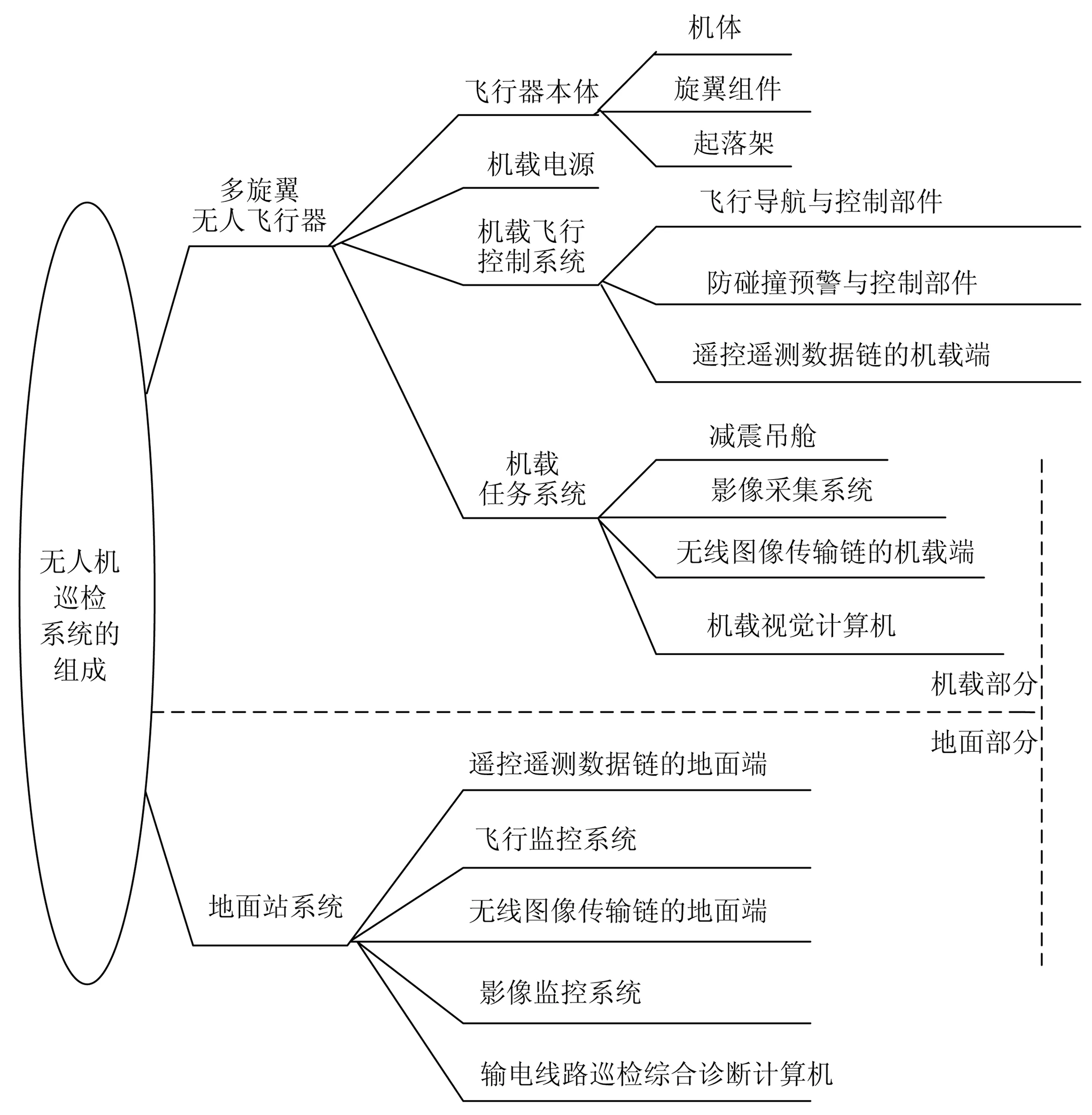
图1 无人机巡检系统的一般组成结构
2 无人机系统设计
巡检无人机可用多螺旋桨飞行器控制装置来实现,该装置由飞行控制模块、电机调速模块、无线通信模块、传感器模块和实时拍摄模块构成,其组成框图如图2所示。
无线通信模块即为GPRS通信模块。实时拍摄模块为一台带有无线传输功能的高清摄像机。主控芯片负责飞行控制的相关运算,统筹管理硬件资源。协处理器采负责传感器设备的管理与数据采集。飞行控制过程中需要多种传感器的实时参数,陀螺仪为系统提供姿态参数,加速度传感器提供加速度参数,高度计向系统反馈飞行高度,GPS装置提供导航或轨迹飞行服务。协处理器STM32F103预留SPI或者I2C接口以便接入更多的传感器。该无人机工作流程如下:地面遥控站发送无线控制信号,无线通信模块接收到信号后将数据传送到飞行控制模块,主控制芯片对来自协处理器的传感器信息进行计算处理,然后输出控制信号到电机调速模块,控制电机的转速。协处理器不断接收来自传感器模块的数据,并对数据进行初步处理,而后将数据发送到主控制芯片,协处理器还负责系统开机时传感模块的初始化。实时拍摄模块将拍摄到的信息传输到主控制芯片,主控制芯片将相关信息传送给无线控制模块,无线控制模块再将其发送到地面或空中移动监测站。
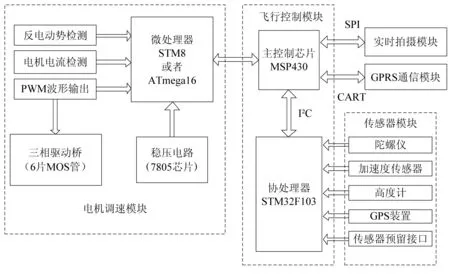
图2 巡检无人机组成框图
3 系统运行
本输电线路无人机巡检系统,由一个移动监测站、数个无人机飞行器以及后台上位机构成。其中移动监测站可以根据检测地点的位置分为地面移动监测站或空中移动监测站。一般情况下,考虑到节约成本等问题,多采用地面移动监测站。在某些自然条件特殊的情况下,考虑到安全方便等问题,采用空中移动监测站。图3即为采用地面移动监测站的输电线路无人机巡检系统整体运行示意图。如图所示,无人机飞行器在相关移动监测站周围输电线路上进行巡检,把图像等相关数据通过GPRS通信传输到移动监测站,移动监测站上的工作人员据此查找输电线路所存在的缺陷并进行应急处理,同时将图像等相关数据通过数传电台传输到供电公司或相关部门的后台上位机上,以便后台工作人员及时监测,在遇到现场不能处理的复杂情况时,还可由后台专家及时给出处理方案。系统所保存的相关数据可为工作人员检修设备提供真实全面的现场资料和缺陷信息,也可为后续研究提供基础数据。无人机巡检系统通信设备组合如图4所示。后台上位机功能结构组成框图如图5所示。
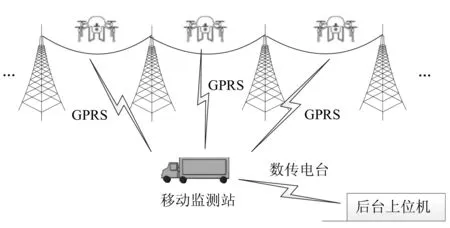
图3 系统整体运行示意图
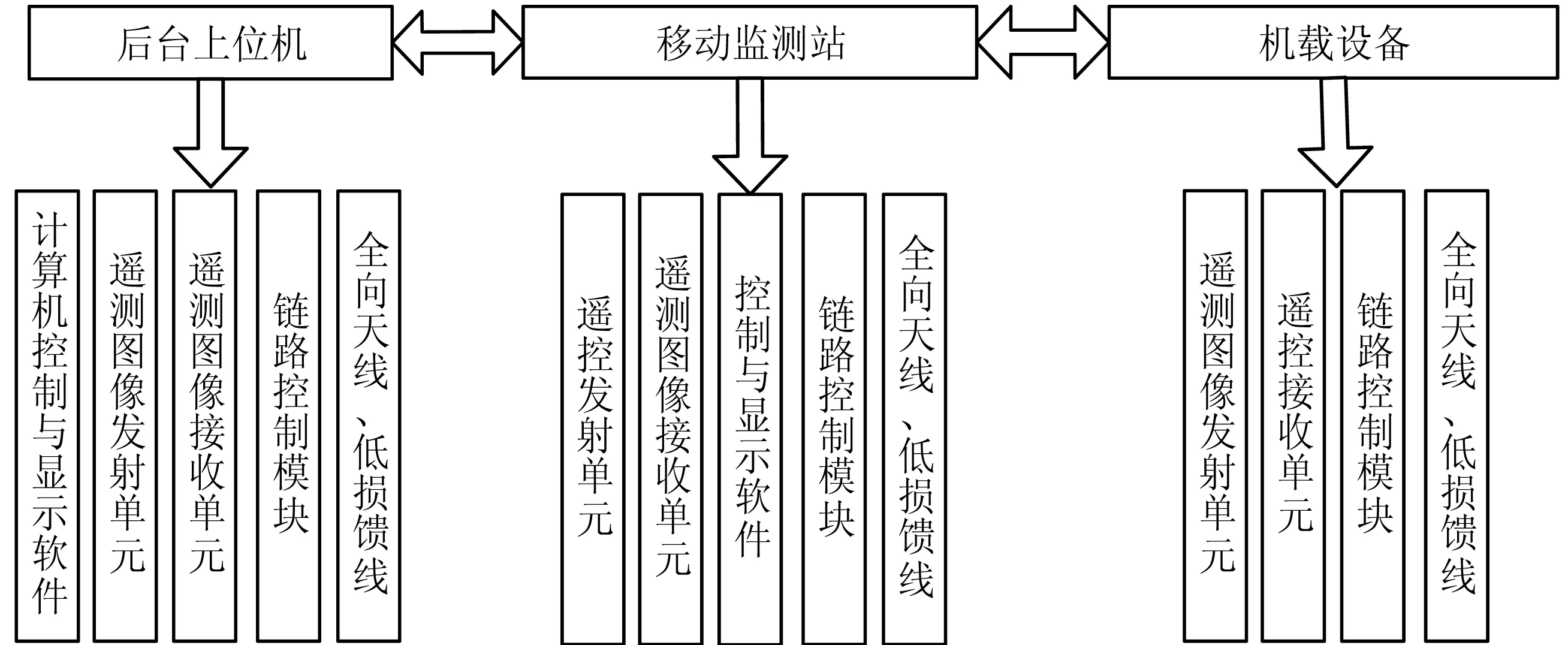
图4 系统通信设备构成
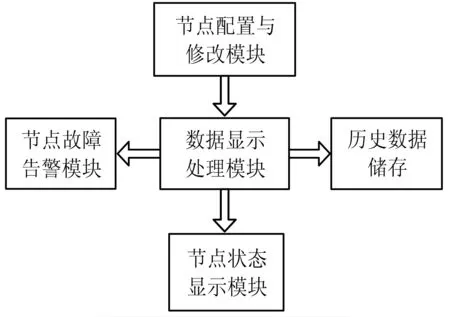
图5 后台上位机功能结构框图
4 结语
为了便于对自然条件恶劣地区的输电线路进行监测与巡检,设计一种无人机巡检系统。该系统由一个移动监测站、数个无人机飞行器以及后台上位机构成,其中移动监测站可根据检测地点需要选用地面移动监测站或空中移动监测站。该系统通过自动导航或者人工定向控制的方法使用相机、红外设备等对输电线路进行信息采集,并实时传输到移动监测站及后台上位机,技术人员可以方便地掌握输电线路的运行情况,及时排除运行缺陷及安全隐患。系统保存的相关数据可为工作人员检修设备提供真实全面的现场资料和缺陷信息,也可为后续研究提供基础数据。
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19
建材发展导向(2019年5期)2019-09-09
成都信息工程大学学报(2019年1期)2019-05-20
四川环境(2019年6期)2019-03-04
电子制作(2018年12期)2018-08-01
电子制作(2018年2期)2018-04-18
山东工业技术(2016年15期)2016-12-01
中国环境监察(2016年8期)2016-10-23
中国质量监管(2016年10期)2016-07-10
小朋友·快乐手工(2015年5期)2015-06-06