AOI检测设备的直线电机定位精度补偿研究
2018-11-05 05:59:44王瑞亭徐兴光
机械研究与应用 2018年5期
王瑞亭,徐兴光
(苏州凌云视界智能设备责任有限公司,江苏 苏州 215123)
0 引 言
随着手机屏幕分辨率越来越高,电路板上Pad点间距越来越小,对AOI屏幕点亮设备的探针压接装置定位精度要求越来越高。电机带动探针压接装置做直线运动,其定位精度直接影响到探针压接点亮成功率,因此需要高定位精度的电机驱动系统。传统的“滚珠丝杠+伺服电机”结构存在联轴器、丝杠、轴承、螺母等中间环节[1],当电机启动、停车、加减速、正反转等运动时,会有反向间隙、弹性变形等误差,影响电机定位精度[2]。为了满足高定位精度要求,克服传统结构缺点,采用直线电机驱动系统。直线电机输出直线运动,直接驱动机械执行机构,消除了中间机械传动环节[3],同时采用高精度光栅进行运动跟踪,大大提高了其定位精度[4]。
在AOI检测设备中,直线电机的定位精度是影响探针压接成功的关键。因此,需要对直线电机进行定位精度测量和补偿。使用激光干涉仪测量不同工况下的直线电机定位精度,然后找出电机的定位误差特征,对其进行分段补偿,提高电机的定位精度。
1 激光干涉仪直线测量原理
激光干涉仪具有测量精度高、环境适应能力强、性能稳定等特点,广泛应用在精密仪器测量和校正工作中[5]。使用雷尼绍公司XL80激光干涉仪(测量精度±0.5 ppm,分辨率1 nm,量程80 m)测量直线电机的定位误差,其测量原理如图1所示。激光器发出两道波长为0.633 μm的单一频率光束(f参、f分),当光束到达干涉镜后,被分为两束光(反射光束f1,透射光束f2),然后两束光被角反射镜反射回干涉镜,由于运动反射镜是移动的,透射光束f2经过反射后变成频率为f2+Δf的透射光束。两个光束汇合后产生干涉,得到测量光束f测,f测=f1-(f2+Δf)。f参和f测经过减法器、可逆计数器和计算机的换算得到直线电机定位精度[6]。

图1 激光干涉仪直线测量原理图
2 直线电机定位精度测量
直线电机在直线运动过程中,影响定位精度的因素很多[7],主要有:
(1) 光栅尺和直线导轨的制造及安装误差[8]。
(2) 直线电机的边端效应,影响进给单元两端的力特性,进而影响定位精度[9]。
(3) 电机安装在机台上,由于没有隔振地基,受周围环境、其他设备加减速带来的振动,影响电机定位精度[10]。
图2为雷尼绍激光干涉仪对直线电机定位精度测量实验,直线电机型号为Ticbel TC002-01-L-3M,光栅尺栅距为20 μm。测试环境参数如下:空气温度25.3 ℃,空气压力1 009 mbar,相对湿度56%RH,材料温度23.7 ℃,环境系数0.316 μm,膨胀系数11.7 ppm/℃。

图2 直线电机定位精度测量实验
AOI检测设备应用在全自动无人车间中,对产品节拍要求很高,这就对直线电机的速度、加速度、定位精度提出了很高的要求。测试现场如图2所示,由于AOI检测设备属于精对位,运动行程为5 mm,为了能够全面客观的反应直线电机的定位精度,在5 mm行程范围内平均设置20个数据采集点,测试在不同速度、加速度和位置的条件下直线电机的定位精度,并对其进行分析。为了能够在系统稳定时刻采集数据,直线电机在每个数据采集点停留3 s。在不同工况下,直线电机定位精度测试数据如图3及表1所示。
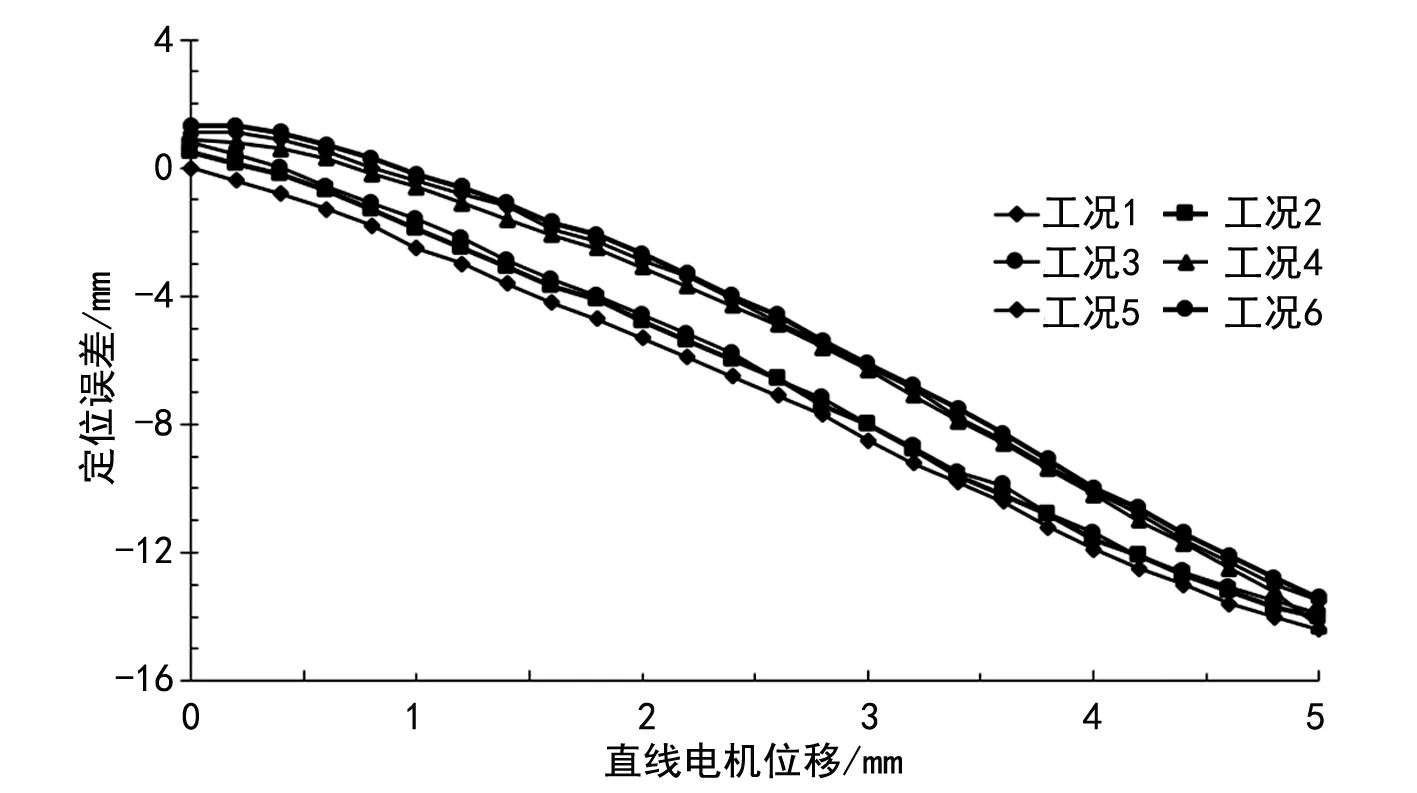
图3 不同工况下直线电机的定位误差
从图3和表1中可以发现:①该直线电机的定位误差随着位移的增加而增加,增长速率基本一致,大体呈现一定的线性增长;②在不同工况下,直线电机的定位误差相差不大,定位精度具有良好的一致性,说明速度、加速度对其定位精度影响不大。

表1 不同工况下直线电机的定位误差
3 定位精度补偿
采用最小二乘法对图3各点定位精度的平均值进行线性、分段线性和三次样条拟合[2],用来减少定位精度误差。通过拟合得到以下函数:
线性拟合函数公式:
y=-3.1x+1.82
(1)
分段线性拟合函数公式:

(2)
三次样条拟合函数公式:
y=0.06x3-0.63x2-1.34x+0.79
(3)
为了验证对比三种拟合函数补偿后的定位精度,在相同工况下(v=2 mm/s,a=5 mm/s2),测量直线电机补偿后定位精度,如表2和图4所示。
采用三种不同的补偿方法对直线电机定位误差补偿,线性补偿后直线电机定位精度为1.8 μm,分段补偿后直线电机定位精度为1.5 μm,三次样条补偿后直线电机定位精度为1.4 μm,由于直线电机的定位误差线性比较好,补偿后三种补偿精度差别不是很大,定位精度都控制在2 μm以内,和补偿前比较,直线电机定位精度大大提高。从补偿方式来看,采用三次样条补偿后精度最高,达到1.4 μm。
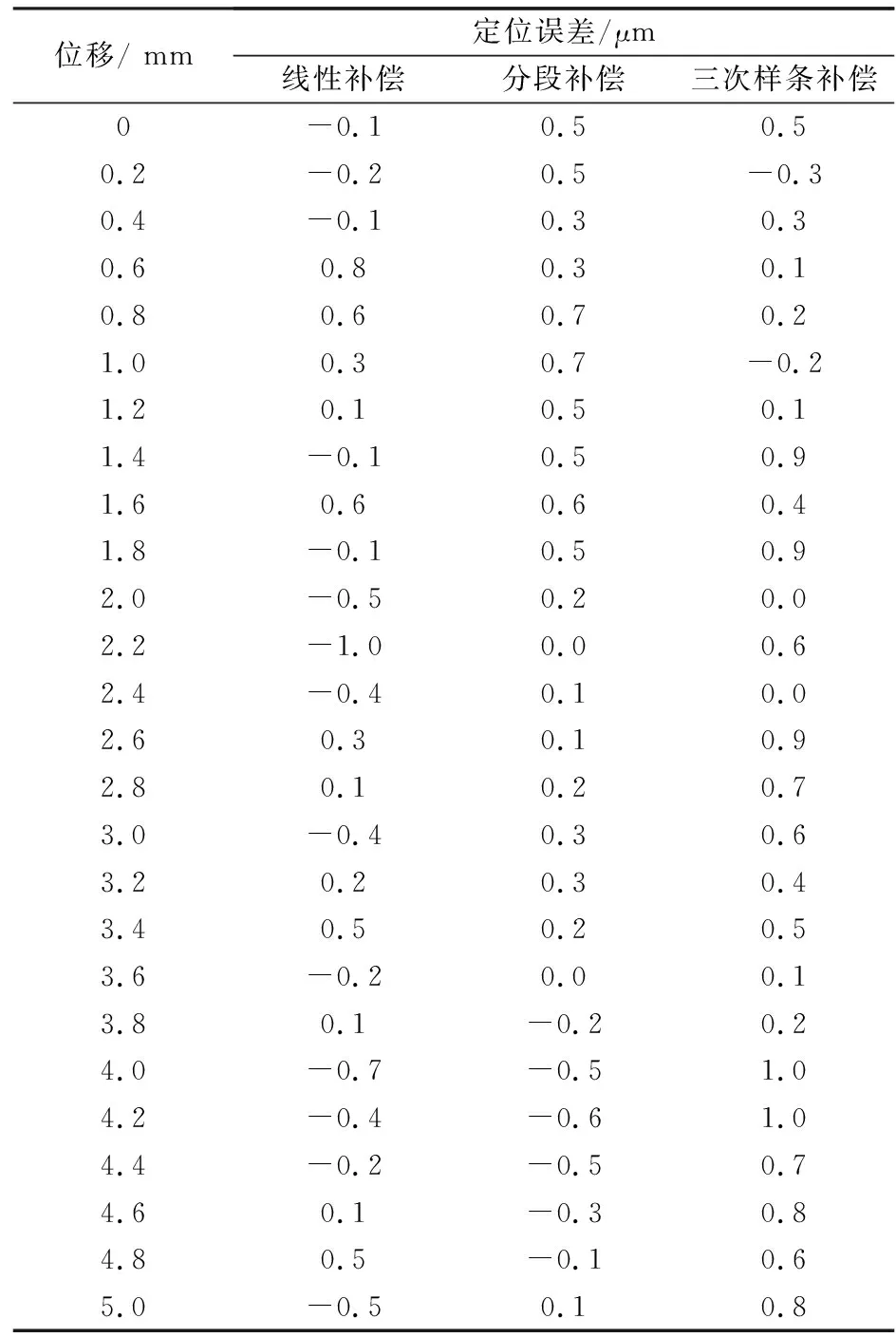
表2 补偿后直线电机定位精度
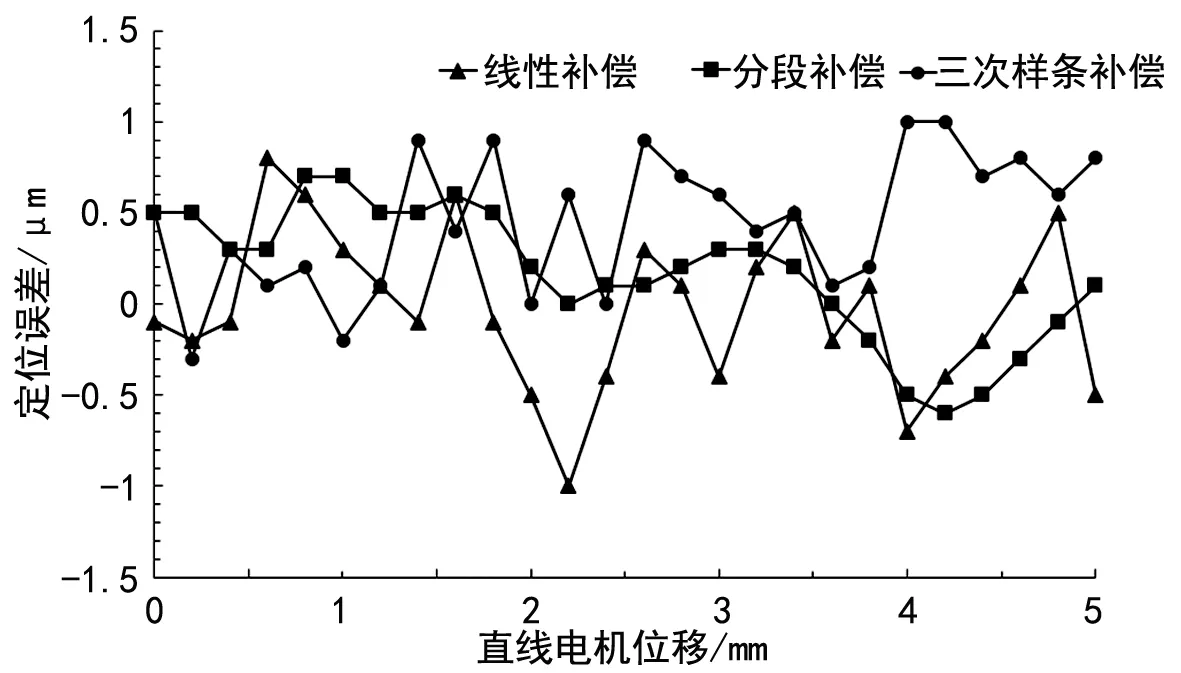
图4 采用三种补偿方式补偿前后定位精度
4 结 论
利用雷尼绍激光干涉仪对AOI检测设备中的直线电机进行定位精度测量,并根据测量结果进行线性补偿、分段补偿、三次样条补偿,通过对比分析补偿前后测试结果,可以发现直线电机的速度、加速度对定位精度影响不大,直线电机的定位精度随着位移增加具有累加性。采用三次样条补偿后电机定位精度最优,可以极大地提高直线电机定位精度,从而达到理想状态。
猜你喜欢
激光技术(2024年1期)2024-04-03 12:09:02
安徽师范大学学报(自然科学版)(2022年3期)2022-07-14 03:54:42
九江学院学报(自然科学版)(2022年2期)2022-07-02 02:34:06
奥秘(2021年3期)2021-04-12 15:10:26
计测技术(2020年6期)2020-06-09 03:27:14
航天电子对抗(2019年4期)2019-06-02 08:22:40
制造技术与机床(2017年7期)2018-01-19 02:30:00
制导与引信(2017年3期)2017-11-02 05:16:58
软件(2017年6期)2017-09-23 20:56:27
计算机测量与控制(2017年6期)2017-07-01 16:24:14