悬浮式旋转停车库的设计
2018-11-05 09:28:52胡文龙李威尔刘轩松明瑞轩杨鹏程
机械研究与应用 2018年5期
胡文龙,张 俊,李威尔,刘轩松,明瑞轩,杨鹏程
(1.湖北文理学院 汽车与交通工程学院,湖北 襄阳 441053; 2.湖北文理学院 机械工程学院,湖北 襄阳 441053)
0 引 言
随着社会的发展,汽车已经成为生活中不可缺少的一部分。但在享受汽车带来便利的同时,停车难又成为普遍存在的一个问题。通过走访调查和查找资料,发现各种类型的停车场已用于不同场所,立体停车库更是多种多样:升降横移式、巷道堆垛式、垂直升降式[1]、简易升降式等,但车库机构复杂,工程量大,适用于大型集中停车场所。
针对城市小区停车难的问题,提出一种悬浮式可旋转的停车库。该停车库造型新颖独特,空间利用率高,机构简单巧妙、制造成本低、停车方便,适用于空间较小、不宜建大型停车场的老旧小区。
1 悬浮式旋转停车库的总体设计
悬浮式旋转停车库主要由停车位、横移小臂、固定大臂、支撑框架、横移凸起、支撑板、转盘、横移电机、联轴器、固定轴、旋转主动轮、丝杆、升降导轨、升降电机、旋转电机、连杆、升降梳齿台、丝杆支撑座、旋转从动轮等零部件组成[2]。整个停车库可分为升降系统、旋转装置和横移机构三部分,分别实现升降梳齿台运输车辆、四个车位旋转存车取车和横移小臂让位的功能。悬浮式旋转停车库总体结构如图1所示。
根据市场调研和老旧小区的需求,设定为四个停车位,单个停车位长5 000 mm、宽2 200 mm,通过计算最终确定了停车库总长为L=9 066 mm、总宽为W=7 900 mm、总高为H=4 500 mm;停车库最大承载12 t、总重量为20 t;停车位面积28.38 m2,因采用架空悬浮式结构,实际占用绿化草坪面积2.25 m2。该停车库允许停放车辆的参数表如表1所示。

表1 允许停放车辆的参数表

图1 悬浮式旋转停车库总体结构图 1.停车位 2.横移小臂 3.横移挡块 4.机架 5.大臂 6.旋转 电机 7.升降电机 8.横移电机 9.丝杆 10.主动小齿轮 11.转盘齿轮 12.固定轴 13.横移支板 14.旋转底板 15.旋转转盘 16.配重架 17.配重块 18.载车板 19.升降梳齿载车板
2 停车库的传动方案设计
该悬浮式旋转停车库,通过三个电机驱动分别实现载车板的升降、四车位停车架的旋转和停车位横移的功能,三个运动独立工作,互不影响又相互协调运动。
2.1 升降系统传动方案
如图2所示,升降系统用于将车辆通过载车板升降到停车位,其传动方案是:工作时,升降电机1输出动力,经联轴器2传递扭矩并由减速器3匹配转速后,带动摩擦轮传动机构运动,从而驱动载车板与升降梳齿台上下运动[3]。
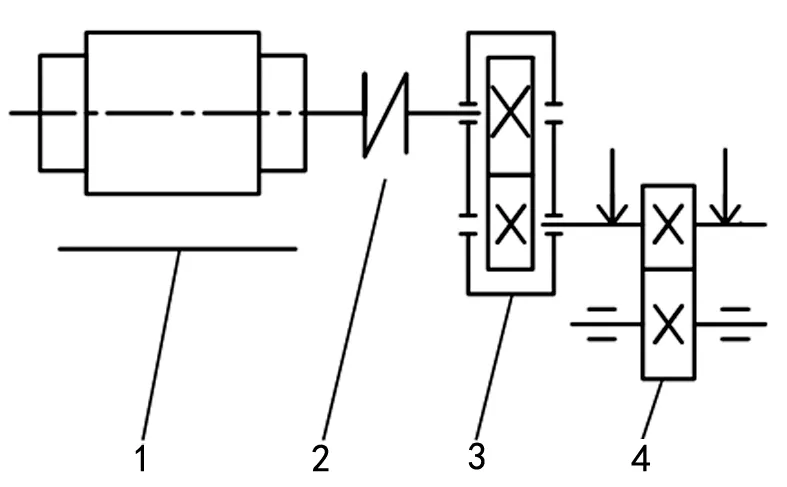
图2 升降系统传动方案1.电动机 2.弹性联轴器 3.减速器 4.摩擦轮传动
2.2 旋转装置的工作原理
旋转装置用于驱动四车位停车架的水平旋转,其传动系统呈垂直安放在停车架上,如图2所示。
工作时,旋转电机1输出动力,经联轴器2、减速器3将扭矩传递给行星齿轮4,由于带外齿转盘轴承5固定在机架上不动,从而使装配于转盘内圈上的停车架6旋转[4],并带动横移大臂、横移小臂和停车位共同运动,旋转一定±90°或±180°,实现停车位的四分度转停。
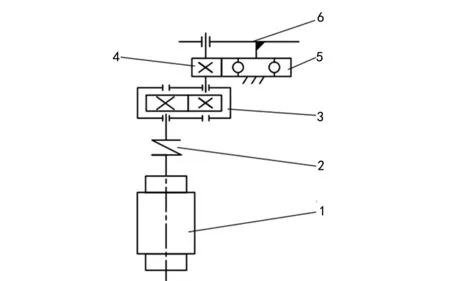
图3 旋转装置传动示意图 1.电动机 2.联轴器 3.减速器 4.行星齿轮 5.外齿转盘轴承 6.四车位停车架
2.3 横移机构
横移机构是把停车位横向移动一个车位宽度,以让出载车板的上行通道,实现车辆的转移交接。机构的实现方式是:横移电机1输出动力,经联轴器2和减速器3带动一端固定的丝杆旋转,通过丝杆螺母副4驱动横移小臂向内或外运动[5]。
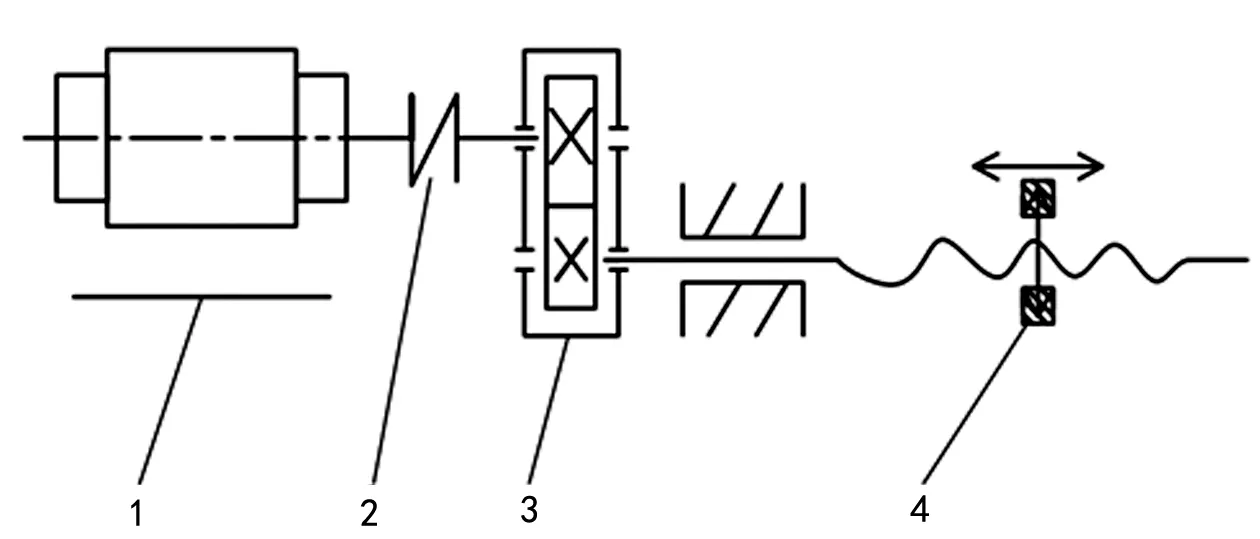
图4 横移机构传动方案1.电动机 2.弹性联轴器 3.减速器 4.丝杆螺母副
3 基于CATIA的参数化三维建模
将停车库分为机架、升降系统、旋转装置、横移机构四个部件,其中机架为整个机构的支撑部件,用于安装其他零部件并保证各零件间的相对位置关系,其上直接连接着升降系统与旋转装置,采用45号钢[6];升降系统与旋转装置均包括驱动和承载两个部分,升降系统的驱动通过曳引电机、曳引轮、曳引绳等来实现,承载部分包括升降支架与载车板,旋转装置的驱动通过步进电机带主动小齿轮、旋转底板绕固定的转盘齿轮做行星转动;横移机构包括驱动和导向两个部分,驱动采用步进电机带动滚珠丝杠来实现,导向部分采用圆柱导杆来实现。
为了便于修改和调整停车库的各部分结构尺寸,应采用参数化的设计方法,通过在Catia组建中定义尺寸变量来建立各个零部件的参数化模型[7]。在此以滚珠丝杆螺母部件为例,介绍其参数化建模过程:
(1) 构建丝杆螺母副的草图。用“文件->新建”命令打开新建对话框,选择“part”选项,并接着在生成的命名对话框中命名为丝杆螺母副,点击X-Y轴,用“视图->工具栏->草图编辑器”命令,生成所选螺母副的草图编辑页面,并用工具栏中的轮廓线勾画出丝杆螺母副的二维草图。
(2) 设置丝杆螺母副的参数。在工具栏中点击约束命令,然后点击螺母副草图的相应位置,即可对螺母副尺寸进行修改。
(3) 生成丝杆螺母副的初步三维模型。点击工具栏中的退出草图编辑器,用“视图->工具栏->凸台”命令生成凸台尺寸对话框,输入螺母副的尺寸,即可生成丝杆螺母副的初步三维模型。
(4) 生成丝杆螺母副的三维模型。再通过倒圆角、挖槽等命令对初步的三维模型进行编辑,生成丝杆螺母副的三维模型。
使用时,只需单击“零件几何体”命令,在弹出的菜单上选择需要修改的参数,输入数值后系统会自动更新各元件的几何尺寸,能实现个元件的同步、快速修改。最后建立的停车库三维模型如图5所示。

图5 悬浮式旋转停车库三维模型
4 运动仿真与分析
仿真之前,将要仿真模型所需的部件在装配模式下按照技术要求进行装配。装配时应在能满足合理装配的前提下,尽量少用约束,以免造成约束之间互相干涉[8]。以旋转装置的运动仿真为例:
(1) 通过“开始(S)”-“数字模拟”-“DMU Kinematics”进入到运动仿真模式,在“插入”下,点击新机制命令,可看到目录树Application下添加了Mechanisms-Mechanism.1。
(2) 添加两个旋转铰。点击旋转铰,在出现的对话框Line1后的空格选择主动齿轮的轴线,在Line2后的空格选择侧板孔的轴线,在Plane1后的空格选择主动齿轮的端面,在Plane2后的空格选择侧板的端面,点选Angle driven即可。重复上述步骤给从动齿轮添加旋转铰,从动齿轮不能点选Angle driven,因为它要被主动齿轮带动。
(3) 添加齿轮铰。在对话框中点选齿轮铰,出现齿轮铰的对话框,在Revolute Joint1后的框里点选刚创建的主动齿轮旋转铰Revolute Joint1;在Revolute Joint2后的框里点选刚创建的从动齿轮旋转铰Revolute Joint2;Ratio定义为-1,以为主从齿轮转向相反;点选Angle driven for revolute1.就是主动轮驱动。
(4) 添加固定铰:点击固定零件图标,用鼠标选中侧板即可。这时系统会提示,可以进行仿真了。
(5) 运动仿真:点击命令模拟,出现运动模拟对话框,这时,系统一般默认命令角度范围是:-360~360,点击角度后的“…”可以修改范围。点选On request,否则拖动游标时,系统无法记录运动过程。完成上述内容并拖动游标,仿真开始。
通过运动仿真可知,四个停车位之间应留有足够的距离,以应对转动惯性;升降系统梳齿结构尺寸必须精确,以免造成错位打齿;运动元件间需添加正确的连接方式,丝杆、齿轮轴、上下销轴等铰接处使用销钉连接,丝杆螺母、升降平台等移动部位使用滑动杆连接。
5 结 语
以设计一种空间利用率高、占地面积小、制造成本低、便于停车的停车库为设计目标,设计出了一种新型的车库。该停车库建立在道路旁的草坪上,停车位悬空在草坪上,占地面积小。将梳齿交错结构和典型机械传动方式运用于车辆的存取运动和交接,巧妙地实现车辆的交接及转移。应用横移机构驱动4个悬臂停车位,使电机数量从4个减至1个;采用镂空式设计减少材料重量,降低了制造成本。在大胆创新的设计过程中,不仅有为解决城市停车难的问题提供一种良策,对促进我国停车场设计的不断创新也同样具有一定的现实意义。
猜你喜欢
中国设备工程(2024年9期)2024-05-13 06:05:08
橡塑技术与装备(2022年10期)2022-10-03 07:39:14
智能建筑电气技术(2022年2期)2022-02-06 02:33:00
橡塑技术与装备(2021年2期)2021-02-01 03:36:18
指挥控制与仿真(2020年3期)2020-06-08 16:25:18
数字海洋与水下攻防(2019年2期)2019-06-28 07:55:48
电子制作(2019年23期)2019-02-23 13:21:18
信息记录材料(2016年4期)2016-03-11 15:22:26
城市道桥与防洪(2014年5期)2014-02-27 07:26:13
城市道桥与防洪(2013年8期)2013-03-11 15:18:15