
基于不同参考框架的GPS卫星天线校验
2018-11-02 07:17陈俊平胡一帆
同济大学学报(自然科学版) 2018年10期
陈俊平, 胡一帆, 张 帅, 刘 姣
(1. 中国科学院 上海天文台, 上海 200030; 2. 中国科学院大学, 北京 100049;3. 武汉合众思壮空间信息有限公司, 湖北 武汉 430223;4. 上海市政工程设计研究总院(集团)有限公司, 上海 200092)
GPS(global positioning system)在高精度数据处理中,接收机和卫星天线的相位中心偏差(PCO,phase center offset)、相位中心变化(PCV,phase center variation)对精密单点定位的影响能达到几厘米,在高程方向甚至能达到十几厘米;对高精度基线解算,在基线各分量上的影响也能达到厘米水平,当基线越长时这种影响越明显[1-3].自1996年6月30日起,IGS(international GNSS service)的各数据分析中心开始利用相对相位中心改正模型来改正这一误差项.2006年11月后,IGS测站所采用的天线均进行了绝对相位中心模型的改正.地面接收机天线相位中心的绝对与相对校验都是利用露天检定场上的超短基线.相对校验只给出天线相位中心3个坐标轴方向的偏差分量及其随卫星高度角的变化量,绝对天线相位中心检验还给出了天线相位中心改正随卫星方位角的变化[2-4].在对地面接收机天线进行绝对相位中心改正时,如不对卫星天线相位中心予以改正,则GNSS(global navigation satellite system)系统测定的参考框架与使用其他观测技术(如VLBI,very long baseline interference和SLR,satellite laser range)得到的结果间存在1.5×10-8的尺度误差[4-6].
天线相位中心改正与参考框架的更新是一个互相迭代的过程.自从ITRF2008以来,每次国际参考框架的更新,国际GNSS服务组织(IGS)都会要求所有分析中心进行数据的重处理,并向ITRF(international terrestrial reference frame)提供重处理结果的时间序列.GNSS数据重处理时,会对包括天线相位中心在内的所有模型进行更新.从GPS时间1709周(2012-10-07)至1933周(2017-01-28),IGS数据处理采用的GPS卫星天线相位参数PCO是基于IGS08框架重新处理的结果.在此期间,需要与卫星PCO联合使用的PCV参数并没有进行更新,因而造成了IGS08无法直接向ITRF2008归算[7],造成GNSS进行框架传递存在问题.
测站坐标、卫星天线相位中心参数PCO、PCV的自洽一致对于参考框架维持的连续性具有重要意义.利用2005—2016年IGS全球均匀分布的IGS跟踪站观测数据重新计算IGS00、IGS05和IGS08参考框架下的GPS卫星天线PCV参数,重新估计基于IGS08和IGS14参考框架的GPS卫星天线PCO参数,并将估计结果与IGS发布值进行比较.
1 卫星天线相位中心估计原理
GNSS卫星天线相位中心的改正包含平均相位中心与卫星质心的偏差PCO以及随高度角、方位角变化的PCV.将卫星天线PCO各分量和卫星轨道同时估计时,卫星轨道部分特性将会被卫星天线PCO中的x轴和y轴分量吸收,使得x轴和y轴分量在协议值附近存在一个以半年为周期的变化项[8].图1给出了卫星天线PCO的Z轴分量改正示意图.
由卫星天线PCO和PCV所引起的测站至卫星间距离观测值改正为Δεφ(z′),可表示为[9]
(1)

(2)

图1 卫星天线PCO的Z轴分量改正的示意
式中:R为接收机到地心的距离;r为卫星到地心距离;z为测站天顶距.
式(1)中z′的变化范围在[0°,14.28°],从而有cosz′∈[0.97,1.00] .因此,卫星天线参数PCO在z轴分量的大部分都反映在观测视向上,将会被卫星钟差参数吸收,从而PCO/PCV参数带来的观测残差φraw(z′)为
(3)
将φraw表示为天底角的线性分段函数,如式(4):
(4)

(5)

(6)
式中:m为PCV的分段节点数.
由φraw(z′)中包含有卫星天线PCO和PCV,在对二者进行分离时,引入约束条件如式(7):
(7)
式中:a为观测残差中的常量部分.在以上过程中,拟合的残差即为卫星天线PCV的值[10].
基于以上模型,通常PCV的估计方法为利用非差观测值固定双差模糊度,同时解算卫星轨道、钟差、测站坐标和接收机钟差, 最后分析残差提取卫星PCV.在估计PCV时,由于利用分步的方法先解算出精密轨道,再固定精密轨道解算卫星钟差、测站坐标和接收机钟差,从而显著减小了法方程的维数,降低了参数相关性,从而提高参数求解的精度.
2 基于不同参考框架的PCV参数解算
2.1 PCV解算策略
IGS发布的天线绝对相位中心改正模型中GPS卫星天线PCV,无论是IGS_05.atx还是IGS_08.atx均是基于IGb00框架,从而卫星的PCV与框架存在不自洽的问题.为提高两者的一致性,进而提高GNSS框架传递的精度,重新解算不同参考框架(IGS00,IGS05和IGS08)下GPS卫星天线PCV参数.
基于文献[11]中的讨论,约50个左右测站能够实现参考框架的高精度确定.选取IGS08框架中全球均匀分布的49个测站(如图2).利用这些站的观测数据解算卫星PCV参数.解算中参数初始值以及对应参考框架见表1,在坐标水平和高程方向上加1 mm强约束,卫星天线PCO的协议值如表2,卫星天线PCV设为零.计算过程中测站坐标、卫星轨道、测站对流层延迟、地球自转参数同时估计,其他参数设置如表3,不同框架下观测数据时间跨度如表1.
2.2 PCV解算结果
以下BLOCK ⅡR-A类型卫星中选PRN20、BLOCK ⅡR-B/ⅡR-M中选PRN05和BLOCK ⅡF中选PRN25对PCV的结果进行分析.其中PRN20号卫星2015年年积日168至177 d这10 d中卫星有效观测值数目随天底角大小变化的直方图如图3,直方图组距为0.5°.
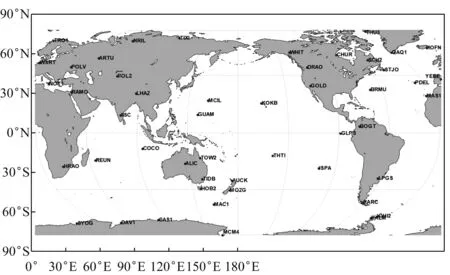
图2 测站分布

参考框架测站坐标测站天线PCO/PCV观测数据时间跨度IGS00IGb00.snxigs05_1602.atx2000年全年、2003年全年IGS05IGS05.snxigs05_1602.atx2005年全年、2008年全年IGb08IGb08.snxigs08_1884.atx2013年到2015年3年

表2 不同类型卫星天线PCO协议值
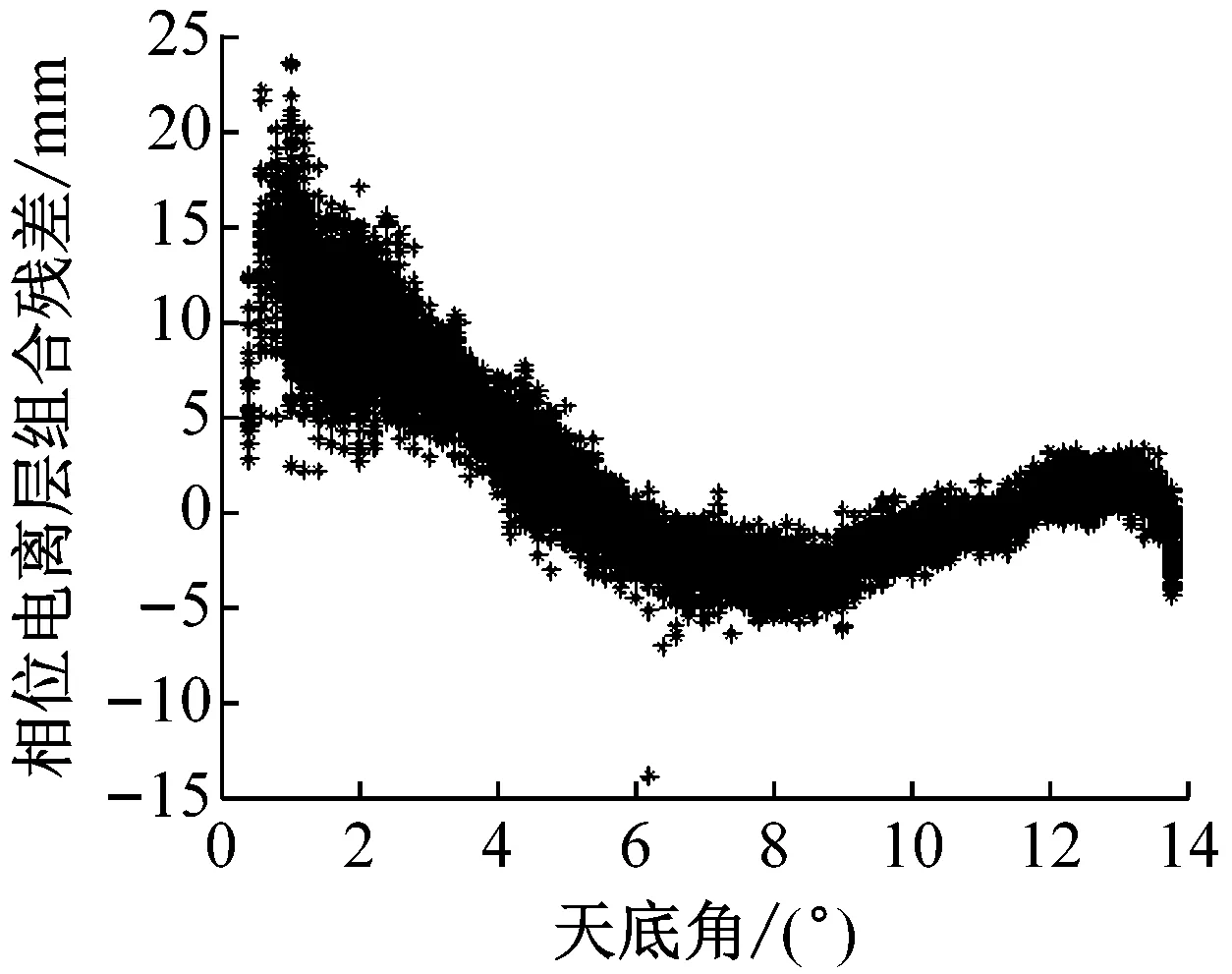
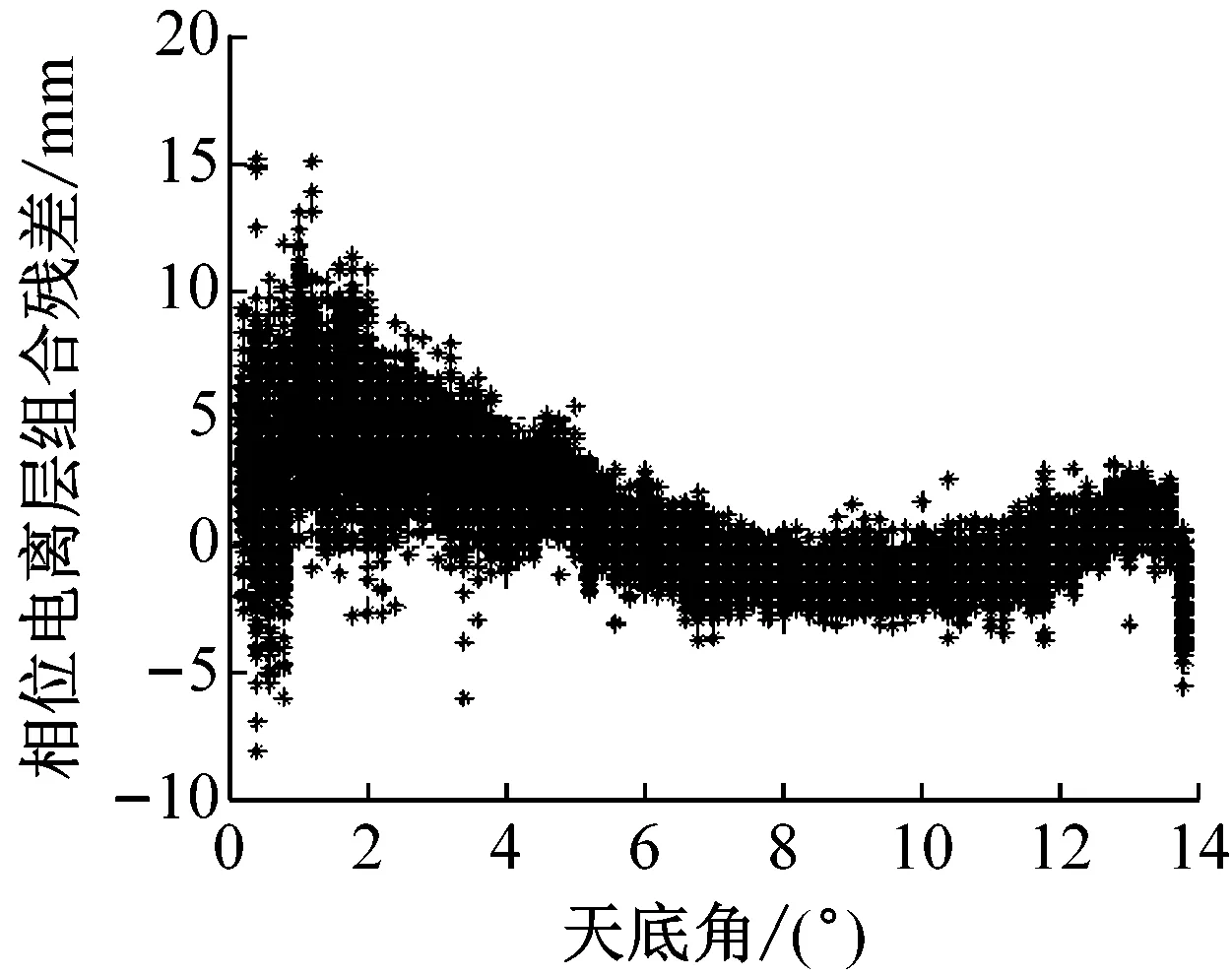
由图3可知,由于卫星星座设计的关系,天底角在 [0°,2°]范围内有效观测值数目很少.鉴于一颗卫星10 d的有效观测值数目便能达到39 000,将每周的卫星有效观测值非差残差按照0.2°步长进行分段,可得到PRN20、PRN05和PRN25三颗卫星3年的观测残差随天底角的变化如图4.

表3 估计卫星天线PCV的参数设置

图3 PRN20有效观测值数目随天底角变化的直方图
由图4知,PRN20、PRN05、 PRN25三颗卫星的非差残差随天底角的增大,其离散度不断减小,这与图3中随着天底角增大而有效观测值数目不断增加吻合.限于天底角[0°,1°]间有效观测值数目过少,该范围的卫星天线PCV不采用残差拟合值.
进一步对以上残差序列按照式(4)~(7)进行计算,PCV的分段线性拟合的步长取为1°,可得到如图5的基于IGS08框架的卫星天线PCV结果,图例中IGS图标代表IGS的发布值.

a PRN20
b PRN05
c PRN25
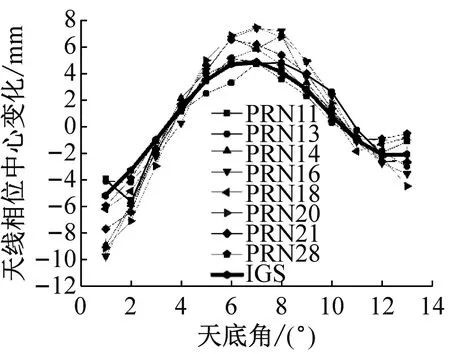
a BLOCK ⅡR-A

b BLOCK ⅡR-B/M

c BLOCK ⅡF
按照同样的方法,计算基于IGS00和IGS05框架的卫星天线PCV结果.篇幅原因,不加以讨论.
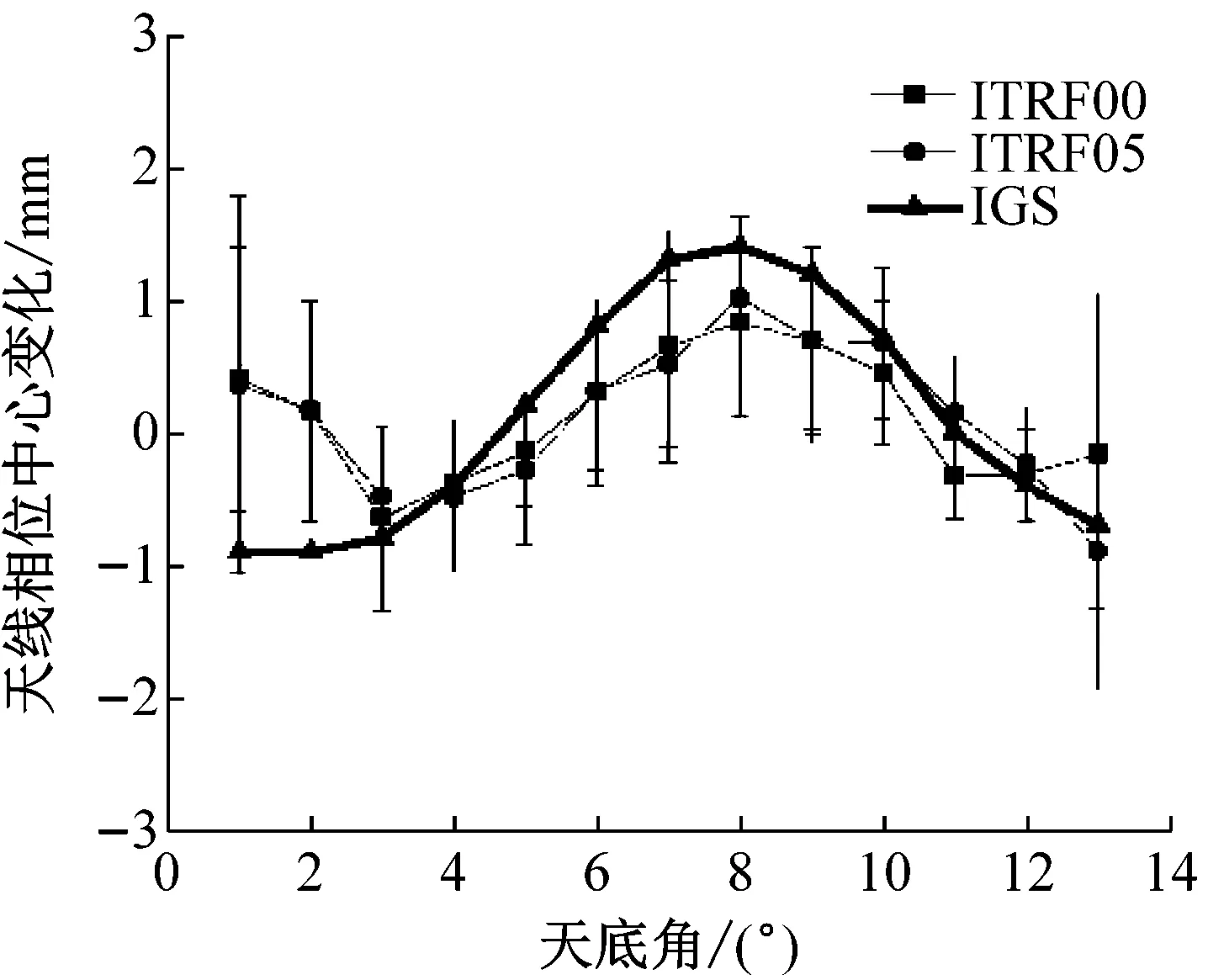
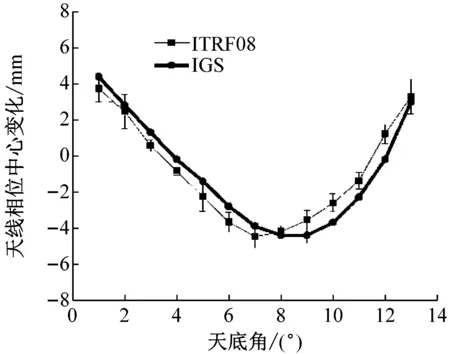
图6将基于不同参考框架同一类型卫星天线的PCV计算值与IGS发布值进行对比,并给出计算PCV参数的重复率(标准偏差).由图6知,基于不同参考框架计算所得的同类卫星天线PCV结果相近,基于同一参考框架的同类卫星天线PCV重复率最大值均集中在天底角1°和13°附近,其值在1 mm左右;重复率平均值为0.70 mm,最大可达2.12 mm.卫星类型BLOCK ⅡR-A、BLOCK ⅡR-B/ⅡR-M和BLOCK ⅡF的PCV在数值和变化趋势都与IGS发布的卫星天线PCV吻合较好.同时可见重新计算的结果与IGS公布值存在差异,这也反映IGS采用的参考框架和PCV不自洽的程度.
统计基于不同参考框架的同类卫星天线PCV在[1°,13°]整度数处差异的绝对值以及不同参考框架下PCV估计值与IGS发布结果的差异,可见其最大不超过1.645 mm;平均值分别为0.726 mm和0.844 mm.
综上分析,基于不同参考框架所得的卫星天线PCV的差异较小;与IGS发布值的差异也较小,基本在1 mm以下,天底角1°和13°处差异较大.
a BLOCK ⅡA

b BLOCK ⅡR-A

c BLOCK ⅡR-B/M
d BLOCK ⅡF
3 基于不同参考框架的PCO参数解算
3.1 PCO解算策略
采用以上IGS跟踪站2005年到2016年12年的数据解算卫星天线PCO参数.解算过程中测站坐标框架取自IGS14,仅估计PCO的z轴分量,其初值选为协议值;解算过程中测站坐标在水平和高程方向上分别加5 cm和10 cm约束;卫星天线PCO通过最后统一处理法方程得到.
值得注意的是,本节仅解算基于IGS14框架的各参数值来形成法方程系统,得到法方程系统后,可通过基准转换的方法来得到基于IGS08等其他框架的卫星天线PCO结果.参考框架转换方法如下:以Q表示测站和其他参数的协因数阵,p表示各未知数的近似值,x表示其改正值,则其法方程可表示为
Nx=C
(9)
其中法方程系数N为Q的逆阵,C表示法方程的常数项,在进行基准转换之前先将法方程系数矩阵中已加入的先验约束(主要是坐标上的约束)扣除,假设扣除约束后的系数矩阵为N′ .将基于IGS14框架的法方程转换到基于IGS08框架,即:将列方程时所采用的测站坐标初值转换到IGS08框架下.假设IGS14框架下各未知数近似值为p,IGS08框架下各未知数近似值为p1,其中p和p1的主要差别体现在测站坐标参数上.因为p和p1差值较小,故法方程系数矩阵基本没有变化,仍为N′,从而法方程常数项由C变为C-N′(p1-p) .
3.2 PCO解算结果
对卫星按SVN(space vehicle number)号进行分类,鉴于卫星天线PCO中存在年周期项和半年周期项,故计算时剔除服役时间小于2年的卫星,并通过取平均值来抵消掉周期项.
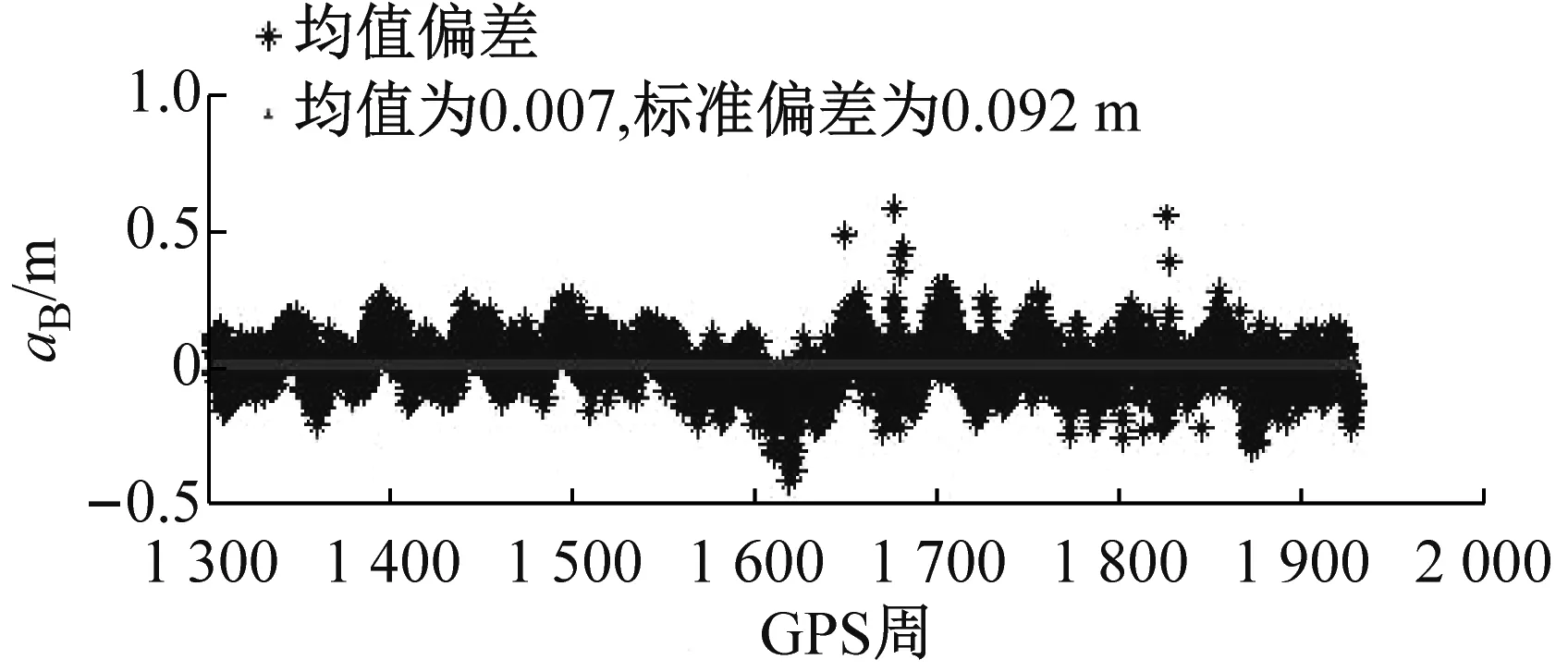
基于IGS14参考框架的部分卫星天线PCO结果相对于IGS发布值的偏差如图7,图中aB为天线相差中心偏差差异,aS为aB的标准差.基于IGS14和IGS08参考框架的所有卫星天线PCO偏差统计结果如图8.
由图7可知,部分卫星解算所得PCO的z轴方向偏差较小,最小甚至仅1 mm;卫星天线PCO偏差的变化都具有周期特性,其中最显著是年周期项,该周期项是由于太阳与地球连线和卫星轨道平面形成的β角相关;卫星进入了地影时期,解算结果的标准偏差也明显变大.由图8可知,不论是基于IGS14还是基于IGS08参考框架,卫星天线PCO的改正数均小于10 cm,其中基于IGS14参考框架的最大偏差为85 mm,所有卫星平均值为-14.4 mm,基于IGS08参考框架的最大偏差为86.0 mm,平均值为-16.8 mm.基于IGS14参考框架的所有卫星天线PCO改正数的标准偏差在[72 mm,113 mm]之间, 基于IGS08参考框架的所有卫星天线PCO改正数的标准偏差在[61 mm,103 mm]之间.由图8将同类卫星天线PCO偏差取均值,基于IGS14和IGS08参考框架的同类卫星天线PCO偏差均值相近,存在系统性的偏差.

a BLOCK ⅡR-A PRN13 PCO的aB
b BLOCK ⅡR-B PRN22 PCO的aB

c BLOCK ⅡR-A PRN13 PCO的aS

d BLOCK ⅡR-B PRN22 PCO的aS
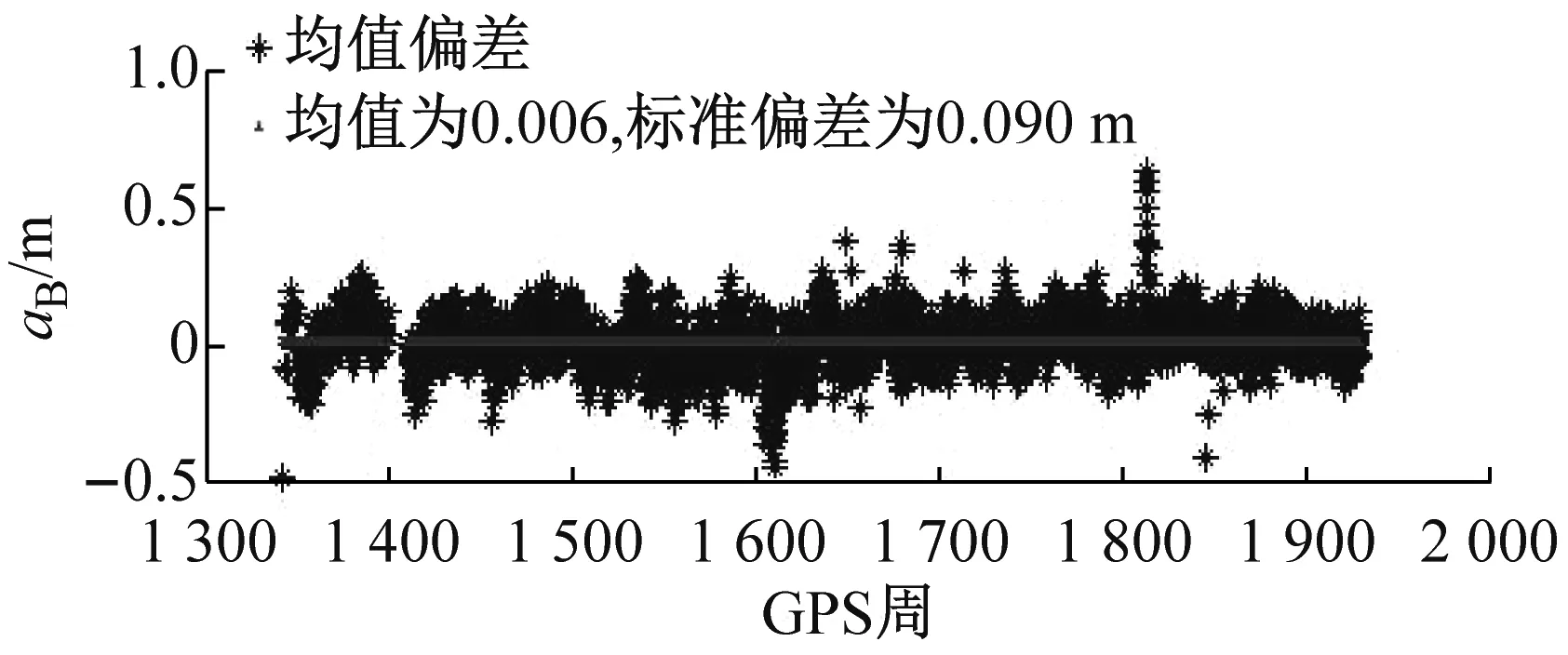
e BLOCK ⅡR-M PRN17 PCO的aB

f BLOCK ⅡF PRN01 PCO的aB

e BLOCK ⅡR-M PRN17 PCO的aS

h BLOCK ⅡF PRN01 PCO的aS
4 结论
介绍了卫星天线PCO、PCV的校验算法,利用IGS全球均匀分布的49个站2005—2016年12年的观测数据,重新估计了基于不同参考框架的GPS卫星天线PCO和PCV参数,并与IGS发布值做了比较.结果显示:基于IGS00、IGS05和IGS08参考框架的卫星天线PCV差异较小,与IGS发布的PCV差异基本在1 mm左右.基于新公布的IGS14参考框架的卫星天线PCO估计结果与IGS发布值差异的平均值为-14.4 mm,基于IGS08参考框架的卫星天线PCO估计结果与IGS发布值差异的平均值为-16.8 mm.而IGS发布的基于IGS14参考框架的各GPS卫星(不包含BLOCK Ⅰ和BLOCK Ⅱ卫星)天线PCO与基于IGS08参考框架PCO差异的平均值达到了52.1 mm,远大于本文解算的结果.这也表明了本文解算的PCO参数与框架的一致性更高.

a 相对于初值的改正及其重复率
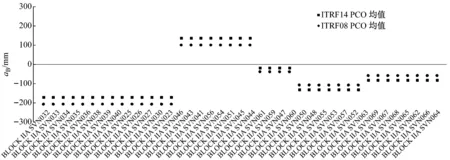
b 相对于初值改正的平均值
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
网络安全与数据管理(2022年3期)2022-05-23
商界评论(2022年1期)2022-04-13
测绘地理信息(2022年2期)2022-04-02
陕西水利(2021年5期)2021-06-21
北京航空航天大学学报(2020年10期)2020-11-14
学生天地(2020年6期)2020-08-25
全球定位系统(2020年1期)2020-03-31
自动化学报(2019年6期)2019-07-23
中国新技术新产品(2014年6期)2014-03-25
