串并联混合型末端执行器设计与柔顺控制研究
2018-11-02 09:18汤奇荣张凌楷邹怀武
载人航天 2018年5期
汤奇荣,张凌楷,李 宁,邹怀武,黎 杰
(1.同济大学机械与能源工程学院机器人技术与多体系统实验室,上海201804;2.上海宇航系统工程研究所,上海201109)
1 引言
随着空间探索的深入,空间机械臂愈发广泛地应用于空间任务的各个方面,如:空间站的建造与维护,卫星的释放、维护与回收,协助目标卫星交会对接,协助科学实验等[1]。空间机械臂对在轨飞行器的精准抓捕是上述空间任务成功执行的基础,但空间零微重力环境下,抓捕过程中物体间的碰撞会使目标物体动量发生突变且难以控制,增加空间机械臂精确抓捕目标的难度,而对应的解决办法就是空间机械臂在轨柔顺抓捕技术。
空间机械臂在轨柔顺抓捕技术主要包括用于实现对非合作目标在轨柔顺抓捕的末端执行器,以及合理的柔顺控制方法与抓捕策略。目前较为成功的应用是国际空间站上搭载的大型空间机械臂末端执行器,其抓捕的核心装置为具有较高被动柔顺特性的三段半环形钢丝索,结构刚度较低,抓捕成功率不高[2]。为提升末端执行器的结构刚度,常加入具有较高结构刚度的并联结构[3]。针对在轨柔顺抓捕的控制,国内外学者常用阻抗控制或力/位置控制[4-5]。但这些方法系统参数整定较难,与现代人工智能方法结合的在线整定控制参数的方法又存在应用成本高与训练时间长的缺点。
针对上述不足,根据空间机械臂在轨柔顺抓捕对接触力的一般要求,本文以自行设计的DELTA并联型末端执行器为对象,采用位置-力阻抗控制方法进行末端执行器柔顺控制;最后在ADAMS中建立该末端执行器的虚拟样机模型,并在MATLAB中设计搭建阻抗控制器,通过柔顺抓捕控制仿真试验和位置-力阻抗控制参数特性,验证本文设计的有效性及其在提高柔顺抓捕成功率上的效果。
2 末端执行器设计
末端执行器要求具有较高的结构刚度,同时能够在微重力环境下实现快速精准定位。本文综合三指爪型末端执行器与类锥杆型末端执行器结构功能特性,设计了一种串并联混合结构的末端执行器,结构如图1所示。该末端执行器在整体结构上参考了DELTA并联机械臂的三臂并联构型,同时在抓捕结构上采用了三指-三瓣型的抓捕结构。首先,DELTA并联机械臂结构稳定性较串联机械臂高,故障率低,结构刚度高的特性,重复定位精度不会因为末端负载的剧烈变化下降[6];其次,三指抓型抓捕机构在美国轨道快车抓捕系统中得到过成功应用[7],其结构具有一定借鉴意义;同时,早期空间交会对接采用的导向引导对接技术对能提高交会对接成功率也有积极效果[8]。综合上述两种抓捕机构,结合导向瓣和三指爪结构的优点,本文设计的用于对非合作目标的飞行喷气接口进行抓捕的末端执行器抓捕机构为三指-三瓣式,关键参数如表1所示。
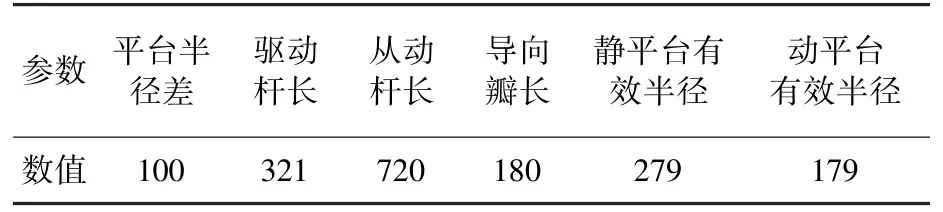
表1 末端执行器关键参数Table 1 Key parameters of terminal executor /mm
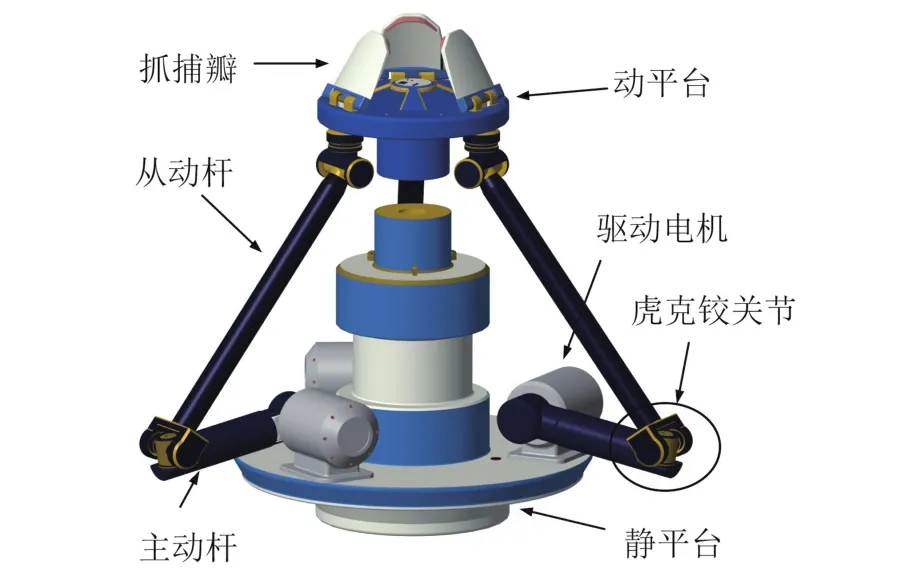
图1 串并联混合型末端执行器示意图Fig.1 Serial-parallel hybrid end-effector
根据末端执行器三指抓捕瓣尺寸参数计算得到执行器的抓捕容差如表2所示。要求目标物在末端执行器抓捕容差范围内时,能够实现可靠抓捕。

表2 末端执行器抓捕容差Table 2 Capture tolerance of terminal executor /mm
3 主动柔顺控制设计
3.1 动力学建模
串并联混合型末端执行器动平台具有3个平动自由度,可实现X、Y、Z三个方向的平动。为便于进行动力学建模,将三个分支连杆同时向其静平台中心平移,利用从动杆交会处的点P的运动特性来代替动平台质心的运动学特性。末端执行器的矢量结构可简化如图2所示。点P向量定义为 r = ei+ Liui+ liwi(i = 1,2,3),ei=e(cosβi,sinβi,0)T,ui= (cosβicosθi,sinβicosθi,其中,e为静平台等效半径,为静平台结构角,θi为驱动杆与静平台平面夹角,Li、li分别为驱动杆、从动杆长,m1、m2分别为驱动杆、从动杆质量。由定义可知主动杆转动角速度·θ可表示为式(1):

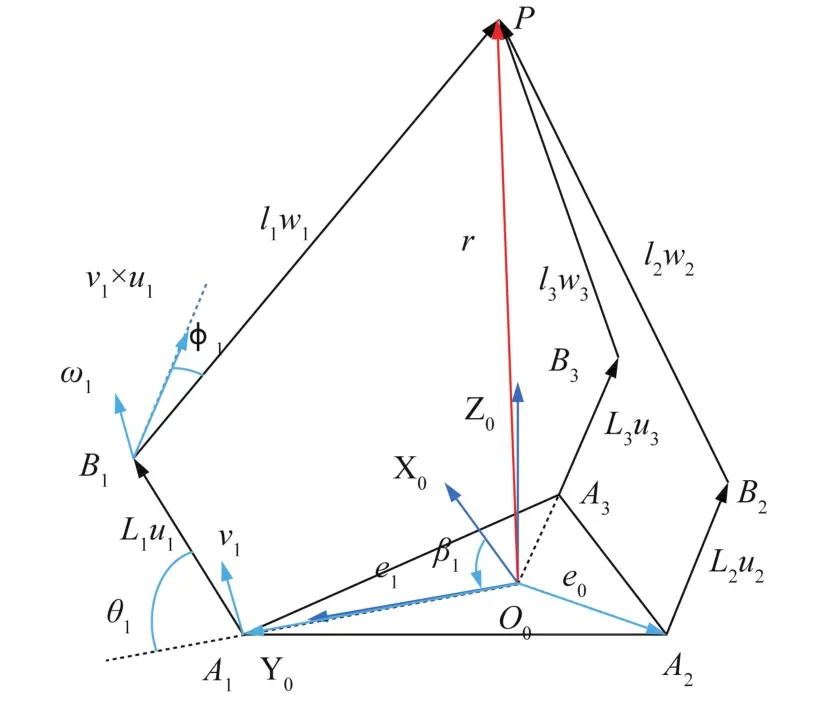
图2 矢量结构简图Fig.2 Diagram of vector structure
其中,根据零重力环境,式(2)省略了重力项; τ = (τ1,τ2,τ3)T,为驱动杆驱动力矩;为动平台质心加速度;ωi为从动杆的角速度;m′为动平台总质量,包括自身和抓取负载质量;I′A为驱动杆等效到其转轴上的转动惯量;Isi为分支i中从动杆相对于静平台固定坐标系的惯性张量,Isi=RIsRT,其中ms、Is分别为从动杆质量和相对其主轴坐标系的惯性张量;R为从动杆随动坐标系Odi-XdiYdiZdi相对静平台坐标系的旋转方向余弦阵; θ = [θ1,θ2,θ3]T为分支主动杆与静平台夹角;rdi为支从动杆i质心相对于静平台的位置矢量;Jwi、Jvi分别为动平台质心速度与分支从动杆i的角速度ωi和质心速度的雅克比矩阵;J为主动杆转动角速度与动平台质心速度的雅克比矩阵。
以上模型中仅假设导向瓣抓捕机构为理想静止状态,但是其运动仍然需要考虑,因此通过动平台导向瓣驱动力矩 τd= (τd1,τd2,τd3)T, 推导出导向瓣抓捕机构动力学模型如式(3):

其中,Jd为导向瓣关于自身转轴的转动惯量矩阵,为导向瓣绕转轴转动的角加速度。
3.2 主动柔顺控制律
零微重力的工作环境下,空间机械臂末端执行器的柔顺特性(即对接触环境顺从的能力[9]),对于执行在轨抓捕任务至关重要。要实现末端执行器的柔顺抓捕控制,需要对动平台与目标物体的接近速度和接触力进行控制。本文中采用位置-力阻抗控制方法对该末端执行器进行主动柔顺控制,通过调整末端接触点位置/速度及力的关系来实现末端的主动柔顺控制[9],控制系统结构如图3所示。
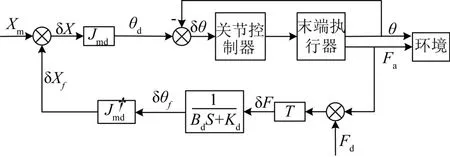
图3 末端执行器阻抗控制框图Fig.3 Diagram of impedance control of end-effector
图中Xm为期望末端位置,θd为关节角度控制信号,θ为关节角度反馈信号;Jmd为末端执行器的雅可比矩阵,其广义逆为为经过阻抗变换得到的位置控制变量;Bds+Kd是系统期望阻抗特性,其中,Bd=diag(Bx, By, Bz, Bα, Bβ, Bγ),Kd= diag(Kdx,Kdy, Kdz, Kdα, Kdβ, Kdγ), 分别为系统平动及转动轴的阻尼特性,以及平动及转动轴的期望刚度特性;Fd是末端动平台与环境的期望接触力,Fa是动平台接触力传感器测得力,δF是末端与环境坐标系的力矩阵,T是六维力相对末端静平台的坐标变换阵。
为了使末端执行器系统具有质量弹簧-阻尼特性,体现结构柔顺特性,末端执行器的驱动力矩与环境的交互关系可定义如式(4)[9]:

其中B为阻尼矩阵,K为刚度矩阵,~x=xxd,x为末端质心实际位置,xd为末端期望位置。
4 柔顺抓捕仿真验证分析
为了验证串并联混合型末端执行器对目标抓捕的有效性,并分析影响柔顺抓捕的关键因素,利用ADAMS与MATLAB软件平台联合仿真进行末端执行器柔顺抓捕仿真实验。
根据设计要求的工况,选取目标飞行器为小卫星,抓取部位为卫星的锥形喷管处,并假设抓捕目标距离动平台的距离向量为(180,120,220) mm,赋予末端执行器静平台垂直于自身Z轴的平动自由度,并令刚度为80 N/mm、阻尼为50的弹簧阻尼器与空间连接,模拟主机械臂系统。同时目标飞行器与空间之间由阻尼为100的阻尼器链接,模拟在轨自由漂浮特性。假设目标与末端执行器动平台距离设置的刚度K和阻尼B分别为K= [6,6,6]T,B = [0.2,0.2,0.2]T。 将目标与动平台的距离作为仿真中环境变量。根据前文给出的末端执行器抓捕容差范围,设定仿真中末端执行器抓捕容差范围为X:0~80 mm,Y:0~80 mm,Z:0~70 mm。当与目标距离在允许的抓捕容差范围内,认为抓取成功。在以上模型和假设条件下进行了实验(记为实验1),结果如图4~5所示。
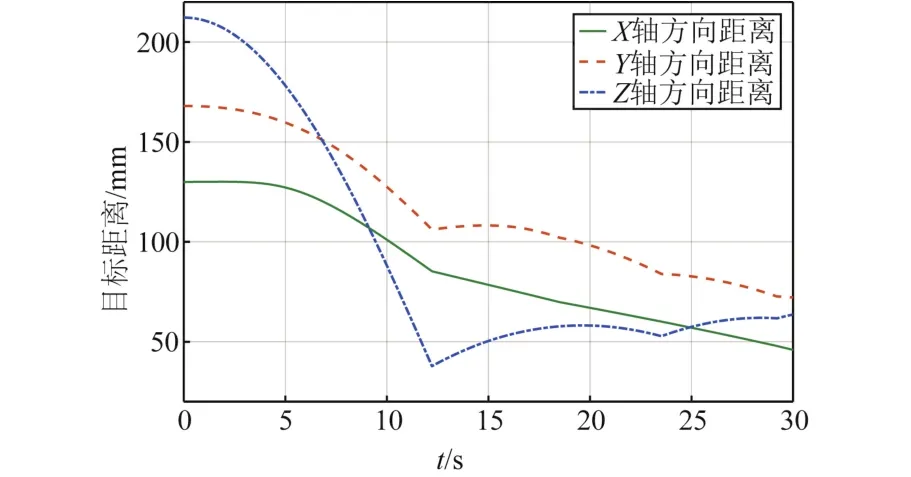
图4 实验1中执行器动平台与抓捕目标距离Fig.4 The distance between moving-platform and target in experiment 1
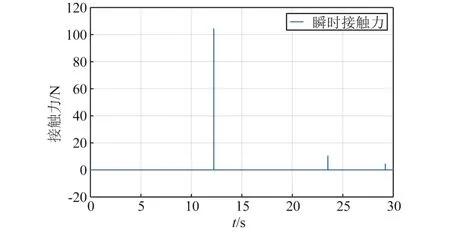
图5 实验1中执行器动平台与目标接触力Fig.5 The contact of from moving-platform and target in experiment 1
图4中,仿真时间 25 s时,X、Y、Z三个方向与抓捕目标距离均小于抓捕容差范围,此时已抓捕成功。如图5所示,由于采用了阻抗控制的方法,赋予目标与末端执行器动平台距离以环境刚度K,使其能在即将接触目标时改变接近速度的方向和大小,减少了末端与目标的接触力,具有了柔顺性。本文设计的末端执行器的抓捕有效性得到了验证。
为了探究环境阻抗特性系数对于系统的影响,将实验的环境刚度系数改为4.5,保持环境阻尼系数不变,延长仿真时间,得到的实验(2)结果如图6~7所示。
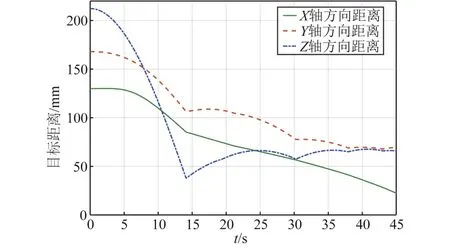
图6 实验2中执行器动平台与抓捕目标距离Fig.6 The distance between moving-platform and target in experiment 2
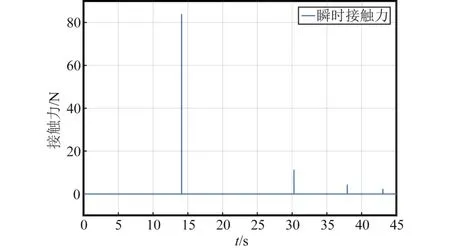
图7 实验2中执行器动平台与目标接触力Fig.7 The contact force from moving-platform to target in experiment 2
由图6可知,仿真时间38 s时,实验抓捕成功。将图7与图5对比可知,抓捕器末端与目标首次接触力会显著减小。
为了进一步验证环境刚度参数对于柔顺抓捕实验的影响,将环境刚度参数增大为8进行仿真,得到结果如图8~9。由图9可知,仿真时间第23 s,实验(3)抓捕成功。 对比图5、7、9 可知,环境刚度与末端碰撞接触力及抓捕成功速度成正相关。
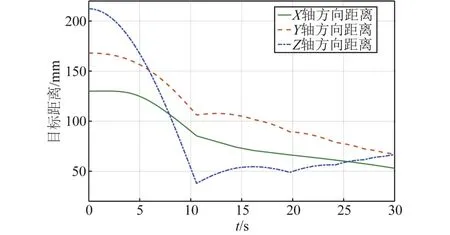
图8 实验3中执行器动平台与抓捕目标距离Fig.8 The distance between moving-platform and target in experiment 3
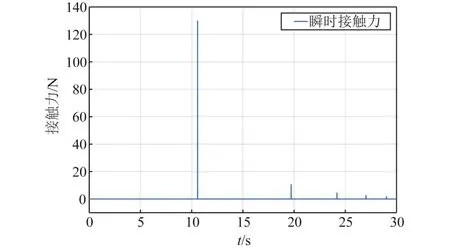
图9 实验3中执行器动平台与目标接触力Fig.9 The contact force of moving-platform and target in experiment 3
为了验证环境阻尼B对柔顺抓捕的影响,设计一组对照实验:环境刚度参数K为6不变,阻尼分别设置为0.1 和0.4,进行实验(4)和(5),结果如图10~13,均抓捕成功。对比图5、图11、图13可知,在降低阻尼系数B时,对于柔顺抓捕的接触力及抓捕速度影响较小。
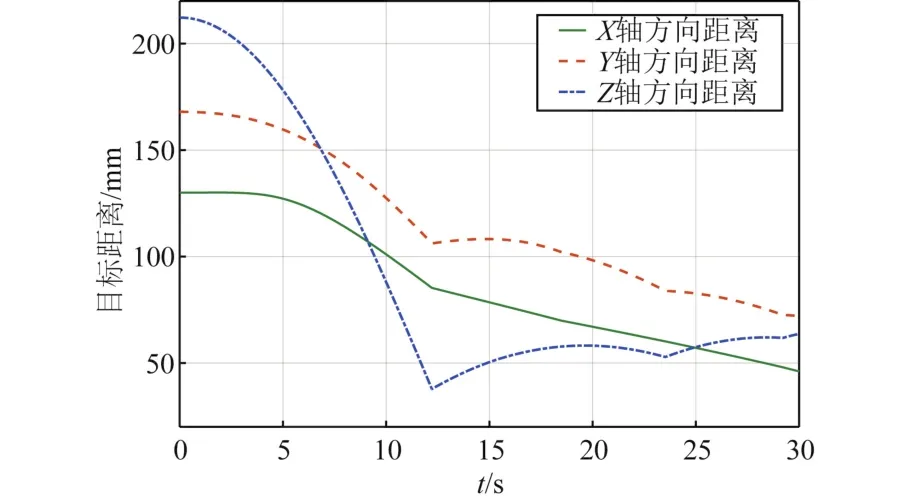
图10 实验4中执行器动平台与抓捕目标距离Fig.10 The distance between moving-platform and target in experiment 4
5 结论
1)本文设计的串并联混合型末端执行器,对抓捕目标的锥形喷管结构具有较大的抓捕容差范围,弥补了并联结构工作范围小的缺点,具有较好的应用前景。
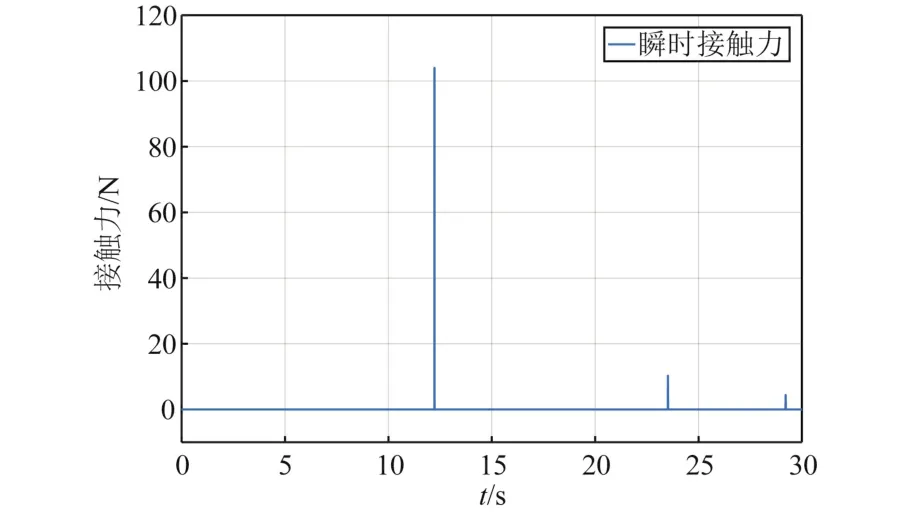
图11 实验4中执行器动平台与目标接触力Fig.11 The contact force of moving-platform and target in experiment 4
图12 实验5中执行器动平台与抓捕目标距离Fig.12 The distance between moving-platform and target in experiment 5
图13 实验5中执行器动平台与目标接触力Fig.13 The contact force moving-platform and target in experiment 5
2)本文设计的位置-力阻抗控制器在抓捕目标飞行器过程中,实现了柔顺抓捕。
3)在环境阻抗系数中,环境阻尼对柔顺抓捕影响较小,环境刚度对柔顺抓捕影响较大。环境刚度越大,动平台接近目标的速度越快,能较快到达有效抓捕位置,但与目标的初次接触力也越大;反之环境刚度越小,抓捕效率会下降。通过改变控制器环境刚度K来改善抓捕效率,但需要根据具体任务条件进行平衡与取舍。
猜你喜欢
液压与气动(2022年10期)2022-11-27
电工技术学报(2022年20期)2022-10-29
汽车实用技术(2022年15期)2022-08-19
茶道(2022年3期)2022-04-27
军民两用技术与产品(2021年6期)2021-10-14
防爆电机(2021年3期)2021-07-21
现代畜牧科技(2021年4期)2021-07-21
宇航材料工艺(2020年6期)2021-01-28
流行色(2020年9期)2020-07-16
汽车维修技师(2019年2期)2019-08-23