
基于有限元法的电梯制动力矩和缺陷仿真分析及检验关注点探讨
2018-11-01 07:23杨震立张东平
中国特种设备安全 2018年9期
杨震立 张东平
(重庆市特种设备检验研究院 重庆 401121)
电梯制动器除了在特殊情况下由安全保护装置制停电梯以外,它是唯一可以制停电梯的部件。因此,它的重要性不言而喻。为了保证电梯的安全性和正常使用,对电梯制动器的检验显得尤为重要,对此人们开展了多项研究,也提炼出了多种检验方法[1-5]。但是,上述检验方法之间的内在联系,以及电梯制动器在使用过程中产生的缺陷对制动能力的影响,目前相关的分析研究较少。
1 电梯制动器有限元模型的建立
随着电梯技术的发展,目前国内在用电梯中较为主流的是永磁同步形式的曳引机,因此本文采用了某典型永磁同步曳引机的图纸,并建立了三维模型,如图1所示。
根据图1将电梯制动过程简述如下:首先制动器铁芯断电,然后弹簧产生的力将制动臂推向制动轮,再由制动臂上的闸瓦和制动轮接触产生制动力矩,实现电梯的制动。
为了对电梯制动力矩进行仿真分析,本文采用的是有限元法。有限元法是指将求解域看成是由许多称为有限元的小的互连子域组成,对每一单元假定一个合适的近似解,然后推导求解这个域总的满足条件,

图1 永磁同步曳引机的三维模型
从而得到问题的答案。文献[6-8]中均采用有限元法对其对应的产品进行了制动性能的仿真分析,表明采用有限元法对制动力矩进行仿真分析是可行的。

图2 电梯制动器的有限元模型
在建立有限元模型时,由于该电梯制动系统零部件较多,若将所有零部件都建立有限元模型,计算效率将大大降低,因此需要进一步简化。由于本文仿真分析的是制动力矩,它的产生全部来自于制动闸瓦和制动轮,所以考虑有限元模型主体由闸瓦和制动轮组成,其他零部件由参考点和刚性单元代替。根据上述思路建立的有限元模型如图2所示,其中弹簧力加载点由RP-5和RP-6表示,制动臂由RP-5、RP-1、RP-3和RP-6、RP-2、RP-4之间的刚性单元表示,制动臂下部的转动点由RP-3和RP-4表示。
2 电梯制动器制动力矩的仿真分析
电梯制动器的仿真分析分为3步:第1步在闸瓦和制动轮之间建立接触关系,将制动轮和RP-3、RP-4进行约束,给弹簧(图2中参考点RP-5和RP-6)施加一个10N的力将制动臂抱紧,使闸瓦与制动轮充分接触;第2步给弹簧施加实际的制动力;第3步释放制动轮在X方向的转动约束,并施加1个11.46°的转角,将制动轮和闸瓦之间的摩擦系数设置为0.3,模拟制动轮强制转动所产生的摩擦反力矩,该力矩即为实际的制动力矩。仿真分析结果如图3所示,其中每一步的时长为1s,由图3中横坐标表示。

图3 电梯制动器制动力矩的仿真分析结果
从图3中可以看到,第1步和第2步没有摩擦反力矩,第3步(横坐标2.0~3.0)中摩擦反力矩快速上升至约6.2×106N·mm,表明加载制动力时未出现制动力矩,强制转动后迅速产生制动力矩,符合模型的边界条件和载荷条件,同时也验证了模型的正确性。由此可知该电梯的制动力矩为6200N·m。
在正常工况下,电梯所产生的力矩由式(1)得到:

电梯参数为:额定载重1000kg,曳引轮节径400mm。重力加速度g取10m/s2,平衡系数按照最低0.4计算,在忽略钢丝绳自重等因素的影响下,根据式(1)在满载工况下电梯产生的力矩为1200N·m。
在标准[9]中,要求“轿厢装载125%重量以额定速度向下运行时,能够使主机停止运行”,但并未对制动力矩有所要求。根据标准要求,根据式(1)装载125%重量工况下电梯产生的力矩为1700N·m。
根据上述计算结果,制动力矩为满载工况下产生力矩的5.17倍,为装载125%重量下产生力矩的3.65倍,因此可以判断制动力矩是满足要求的,同时验证了仿真分析的正确性。
3 电梯制动系统存在缺陷的仿真分析
3.1 电梯单臂制动
对于电梯制动系统,标准[9]还要求“当一组制动部件不起作用时,应仍有足够制动力使载有额定载荷以额定速度下行的轿厢减速下行”。根据该条要求,将有限元模型里其中一侧的制动部件及其载荷删除,其他条件不变,模拟单臂制动的工况,并再次进行分析,结果如图4所示。
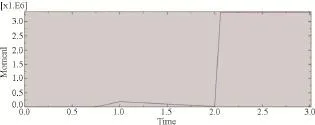
图4 电梯单臂制动时制动力矩的仿真分析结果
从图4中可知,该电梯在单臂制动时,制动力矩在前期并不稳定。等待闸瓦抱紧后稳定在约3300N·m,大于在满载工况下产生的力矩为1200N·m,能够满足标准要求。
3.2 电梯制动弹簧长度异常
根据制动弹簧的工作原理,在弹簧的倔强系数一定的情况下,弹簧压缩量与弹簧力成正比。虽然弹簧长度缩短时制动力矩将会增大,但是长期的压缩将会加快弹簧及其相关零部件的老化及磨损;弹簧长度过分伸长时又会导致制动力降低。因此对于该电梯制动弹簧的长度,厂家出厂时要求其范围在7~8cm。为了分析弹簧过分伸长时对制动力矩的影响,对弹簧长度在极限位置8cm以及再伸长10%(8.8cm)的情况进行仿真分析。通过倔强系数得到弹簧长度为8cm及8.8cm时制动力,然后再调整有限元模型中对弹簧施加的制动力来模拟弹簧过分伸长,其仿真结果如图5和图6所示。
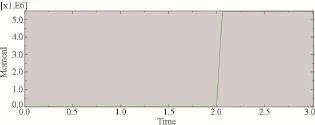
图5 电梯制动弹簧长度在极限位置8cm时制动力矩的仿真分析结果

图6 电梯制动弹簧长度超过极限位置10%(8.8cm)时制动力矩的仿真分析结果
从图5和图6中可以看到,弹簧长度在极限位置8cm时制动力矩为5470N·m,在超过极限位置10%(8.8cm)时制动力矩为3910N·m。弹簧长度伸长量超过极限位置之后,制动力矩下降很快,风险迅速增加,因此弹簧必须在要求的范围内。
3.3 电梯制动闸瓦磨损
在电梯制动闸瓦在长期工作中,可能存在磨损的情况,如边角处的磨损及划痕等。在磨损后,闸瓦和制动轮的接触面积将会减小,制动力矩将会降低。为了分析闸瓦磨损对制动力矩的影响,通过对有限元模型进行调整,对制动闸瓦模型删减10%及20%,其他条件不变,模拟闸瓦磨损10%和20%时,制动力矩的变化情况。仿真结果如图7和图8所示。

图7 电梯制动闸瓦磨损10%时制动力矩的仿真分析结果

图8 电梯制动闸瓦磨损20%时制动力矩的仿真分析结果
从图7和图8中可以看到,电梯制动闸瓦磨损10%时制动力矩为5080N·m,制动闸瓦磨损20%时制动力矩为4060N·m,闸瓦磨损不大时制动力矩有一定降低,磨损较大时制动力矩减少较多,存在风险。
4 电梯制动器检验关注点的分析探讨
为了方便分析探讨电梯制动器检验相关问题,本文提出一个新的概念:电梯制动安全系数,由字母n表示,其计算公式为:

其中:n——电梯制动安全系数;
M——电梯制动器产生的制动力矩;
m——电梯所产生的力矩。
结合电梯检验的相关要求,以及本文的仿真分析以及式(2),将所有分析结果及其制动安全系数进行归纳总结,列入表1中。

表1 电梯制动器仿真结果汇总
表1中的内容可以从以下几个方面进行探讨:
1)电梯满载时,制动安全系数达到5.17,若考虑平衡系数等因素的影响,该系数将会更高。因此,正常情况下能够满足使用要求。该系数由本文所用的有限元模型计算得出,与本文选用的电梯结构紧密相关,仅能代表该电梯的结果。对于不同品牌、不同结构的电梯,制动安全系数皆不相同。通过该有限元模型计算,可以开展不同结构电梯的制动安全系数的比较和评价。
2)目前电梯检规中要求满5年的电梯均要进行125%载荷下行制动试验。从仿真结果来看,在制动器正常情况下125%载荷下行制动时制动安全系数为3.65,另外,考虑维护保养、自然磨损等因素,实际的安全系数将可能进一步的降低。因此,采用该试验来验证使用一定年限的电梯制动性能是十分必要的。
3)125%载荷试验需要耗费一定的物力和人力。因此,通过采用其他简便方法来验证电梯的制动性能对开展这项工作具有十分重要的现实意义。根据仿真分析结果,电梯空载上行时单臂制动的制动安全系数为4.13,较125%载荷下行制动试验的制动安全系数略高,可以近似的考察制动能力。同时电梯空载上行时单臂制动试验还能单独考察各制动臂的制动性能,因此可以考虑由该试验代替125%载荷下行制动试验。
4)制动弹簧在伸长达到极限位置时,制动安全系数由5.17下降至4.56,下降幅度不大,在正常使用时能够接受;但若超过10%,制动安全系数快速下降至3.26,比125%载荷下行制动时更低,容易造成安全隐患。因此制动弹簧的长度非常重要,在检验过程中应引起足够重视,确保弹簧长度在厂家要求的范围以内。
5)制动闸瓦磨损10%时,制动安全系数由5.17下降至4.23,和电梯空载上行时单臂制动的制动安全系数相当,若长期使用将存在安全隐患;制动闸瓦磨损20%时,制动安全系数为3.38,比125%载荷下行制动时更低,容易造成安全隐患。因此在检验时应对闸瓦的磨损量情况进行关注,磨损量较大应及时更换。
6)对于制动轮上有油污、闸瓦材质发生变化等其他制动器缺陷未进行仿真分析和探讨,是因为这类缺陷会明显的严重降低制动力矩,同时,也无法精确地进行模拟仿真。但是在实际检验过程中应仔细观察,发现类似问题应立即整改。
5 总结
1)根据永磁同步曳引机的图纸,建立了电梯制动器的有限元模型以及制动力矩的仿真分析方法,并完成电梯制动器制动力矩的仿真分析。
2)根据电梯制动器检验中存在的各种缺陷,对5种不同情况下电梯制动器制动力矩进行了仿真分析。
3)引入新的概念:电梯制动安全系数,并根据仿真分析结果进行了分析探讨,得到了6条结论,为检验方法和检规的修订,以及检验和维保人员对电梯制动器性能的判断提供了参考。
猜你喜欢
科技与创新(2022年18期)2022-09-17
机电信息(2022年9期)2022-05-07
铁道车辆(2021年5期)2021-11-09
航空发动机(2021年1期)2021-05-22
黑龙江交通科技(2021年4期)2021-05-19
铁道机车车辆(2019年5期)2019-11-11
中国特种设备安全(2019年3期)2019-04-22
中国新技术新产品(2018年4期)2018-02-23
中国科技纵横(2015年23期)2015-11-22
汽车科技(2015年1期)2015-02-28
