
500 m水深张力腿平台总体运动性能分析
2018-11-01 09:21:40,,,
船海工程 2018年5期
,,,
(大连船舶重工集团设计研究院有限公司,辽宁 大连 116005)
张力腿平台(TLP)总体运动性能是张力腿平台设计中最为重要的关键技术之一,主要校核内容包含平台水平位移、升沉运动、筋腱张力和气隙等。本文采用时域耦合分析方法,考虑风、浪、流、筋腱、立管等的影响,验证张力腿平台在500 m水深南海环境作业下的可行性。
目标平台是传统型张力腿平台,在500 m水深的中国南海海域范围内从事钻井和生产作业。平台主体是由4根圆形立柱和环形浮箱组成,平台共设有8根筋腱,分别与4个立柱相连接,井口设计有12根立管。主要设计参数参见表1。
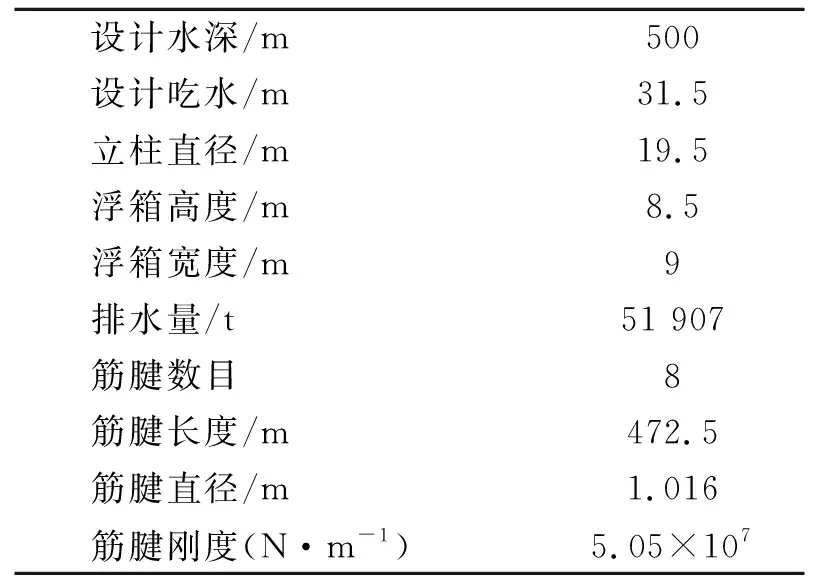
表1 平台主要参数
1 分析方法
张力腿平台在各种环境载荷作用下的总体运动性能受多种非线性因素影响,以及筋腱和立管的制约,因此,必须采用时域耦合的分析方法,本平台采用SESAM软件的HytroD和DeepC模块完成,应用HytroD先完成频域分析获得所需要的水动力参数,在应用DeepC开展时域耦合分析,由于张力腿平台的特殊性,以及数值分析的局限性,根据模型试验结果对数值分析结果修正处理。
1.1 水动力分析
张力腿平台由于其特殊的定位方式,相对于其他浮式平台水动力分析更为复杂,在频域分析时不仅需要考虑张力腿筋腱预张力对整个系统平衡的影响,还需要考虑张力腿平台筋腱刚度和质量对平台水动力性能的影响,其运动方程为:
(1)
式中:M为质量矩阵;A1为水动力附加质量;A2为筋腱附加质量;C为阻尼矩阵,K为刚度矩阵;k为筋腱附加刚度。
筋腱附加质量一般根据经验估算,垂向分量取为筋腱湿重的一半(不考虑水动力附加质量),水平分量取为筋腱湿重(考虑水动力附加质量),根据输入的模型参数及刚度特性,并考虑到模型的质量和附加质量等因素,推得平台运动响应RAO。
1.2 分析工况
根据API规范选取1 000年一遇、100年一遇和1年一遇的南海环境海况计算,分析中风载荷计算采用NPD风谱,其平均风速为53, 48, 和 25 m/s;波浪载荷计算采用JONSWAP谱,其有义波高分别为16.5、13.6和7.5 m;表面流速分别为2.8、2.5和1.6 m/s;保守考虑风浪流同向。
平台工况主要分为完整工况和破损工况,其中破损工况又分为舱室破损工况、一根筋腱移除工况和筋腱破损工况。不同工况对应的安全类型不同,API定义安全类别A是对应于操作工况,安全类别B是对应于极端工况,安全类别S对应于生存工况。工况组合见表2。
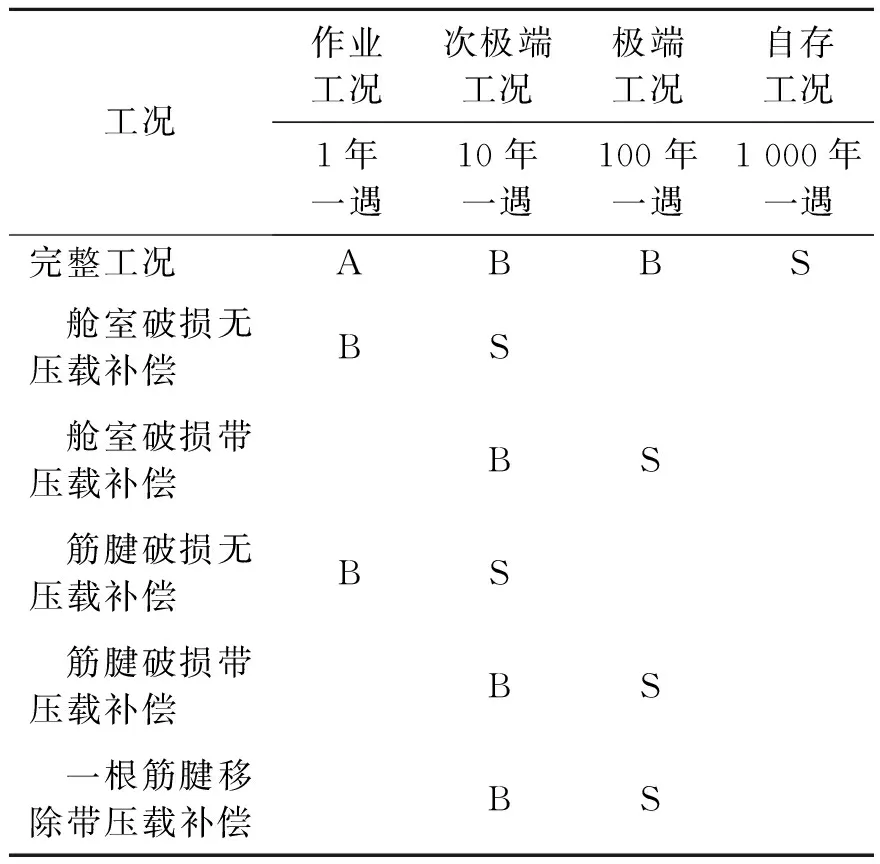
表2 分析工况
1.3 数值模型校准
在时域分析中,筋腱和立管均按照实际属性建立,基于杆件理论的三维有限元法,每根筋腱或立管都被离散成一系列的梁单元,单元不仅具有水动力属性如附加质量和粘性阻尼,也同时具备结构单元属性,如自重、浮力和结构刚度。分析模型见图1。
在执行时域耦合分析前,一个必不可少的过程是数值模型的校准[1]。数值模型的校准通常包括水平推力试验、衰减试验等以获得TLP平台水平刚度、固有周期和各种响应的幅值响应算子等,这些关键参数需要和水池模型试验对比,以确保数值模型的可靠性。
平台水平刚度表征水平力和位移的关系,以及平台水平位移和沉降的关系,见图2。
平台筋腱张力和水平位移曲线表征其不同位置筋腱张力和水平位移的关系,见图3。
平台模型根据静态位移调整后,开始做自由衰减试验,得到平台各个自由度的周期和阻尼。平台数值衰减试验结果见表3,结果显示耦合分析模型合理,可用于进一步分析。

表3 自然周期和阻尼比
1.4 波浪载荷模拟
高频载荷主要包括高频弹振(spring)和超高频鸣振(ringing)。两者都会导致张力腿平台筋键在垂直面内的运动,这些运动反过来又会在筋键系统中产生轴向的振荡。spring 响应可以通过数值分析确定,数值分析是对二阶波浪力的二次传递函数(QTF)进行计算,通常会涉及和频力。现在还没有能够模拟张力腿 ringing 响应的商业的计算机程序,因此必须依靠模型试验获得[2]。计算中采用JONSWAP谱,谱峰升高因子取2.4,波浪谱形式见图4。
1.5 风载荷模拟
张力腿平台的风载荷占环境载荷很大比例,风载荷直接影响到平台的水平位移进而影响筋腱的尺寸选取、筋腱预张力选取以及平台船体主尺度的确定。通过风洞试验或数值计算得到风载荷系数,本文采用NPD风谱,其计算公式如下。
(2)

取10 m高处1 h平均风速,风谱密度函数如下。
(3)

1.6 流载荷模拟
流载荷与风载荷类似,流载荷系数通过风洞试验或数值计算得到,内波是南海的一种特殊环境条件,通常情况下把内波等效为分层流,一般内波只与1年一遇海况叠加,因此,流速一般由风生流、涌流和内波组成[3]。
2 数值分析结果修正
张力腿平台在波浪作用下的运动响应分为波频响应( 5 s
2.1 运动修正
张力腿平台动力成分中高频响应对水平运动和升沉运动影响很小,因此数值统计时忽略高频响应的影响,将运动时历曲线离散成低频响应和波频波频,进而根据模型试验结果修正。
Xmax=Xmean+
(4)
式中:Xmax为平台最大位移;Xmean为平台水平位移;α为波频和低频的耦合系数。
XWFmax=3HWFCorrWF·STDWF;
XLFmax=3HLFCorrLF·STDLF
3HWFCorrWF,3HLFCorrLF为基于模型试验的修正系数;STDWF,STDLF为数值分析波频和低频的标准差。
2.2 气隙修正
张力腿平台气隙计算公式如下:
Airgap=Airgap0-ZTide-ZSubs-Zcrest
(7)
式中:Airgap0为初始静气隙;ZTide为最大潮水位;ZSubs为桩基最大下沉;Zcrest为相对波面升高, 包含平台非线性的平台升沉和波面升高。
随着新规范和标准的颁布,对气隙预报的准确性和波浪抨击的预报要求越来越严格,本文采用时域耦合的分析方法开展气隙预报研究,根据模型试验结果对数值分析中的相对波面升高修正,并考虑潮和涌引起的水深变化对气隙的影响。气隙计算示意见图6。
2.3 筋腱张力修正
数值修正的过程中,对于动态响应,分别考虑数值模型和水池模型对应的高频、波频和低频的相互关系,以及高频、波频和低频三者之间的相关性,再通过一定的组合方式得到修正后的动态响应。动态响应再和预张力、平均力以及设计余量叠加即得到最大或最小的筋腱张力。筋腱张力的修正公式可表示为
(5)
式中:Tmax/min为最大/最小筋腱张力;Tpre为筋腱预张力;Tmean为定常载荷下筋腱张力;Tmar为筋腱设计余量,考虑建造和安装误差,以及潮和涌的影响等;TWFmax=WFextreme·WFcorr·STDWF-prediction;THFmax=HFextreme·HFcorr·STDHF-prediction;TLFmax=LFextreme·LFcorr·STDLF-prediction;WFcorr、HFcorr、LFcorr为模型试验和数值分析波频、高频和低频响应标准差的修正系数;
WFcorr=STDWF-model/STDWFprediction;
HFcorr=STDHF-model/STDHF-predicition;
LFcorr=STDLF-model/STDLF-predicition;
STDWF-model、STDHF-model、STDLF-model为模型试验波频、高频和低频响应标准差;STDWF-predicition,STDHF-predictionl,STDLF-predicition为数值分析波频、高频和低频响应标准差;α为波频、高频和低频的耦合系数;WFextreme,HFextrem,LFextreme为模型试验波频、高频和低频动态响应极值和标准差的比值;WFextreme=(WFmax-WFmean)/STDWF-model;HFextrem=(HFmax-HFmean)/STDHF-model;LFextreme=(LFmax-LFmean)/STDLF-model;WFmax;HFmax,LFmax为筋腱波频、高频和低频响应极值;WFmean,HFmean,LFmean为筋腱波频、高频和低频响应平均值。
3 校核横准和分析结果
3.1 平台运动分析结果
规范对平台位移和转角一般没有具体要求,对于位移和转角限制条件主要来自立管设计要求[5-6]。张力腿顶部和底部最大转角主要由下面2个因素决定:
①避免张力腿与相邻结构物发生碰撞;
②张力腿柔性连接头可容许转动范围,张力腿柔性接头可根据平台实际情况定制,据柔性连接头供应商确认,柔性连接头可容许转动范围可以达到12°。
计算得1 000年一遇、100年一遇和1年一遇的最大水平位移分别是68.21、55.89和 22.83 m,最大位移和水深比为13.64%,根据行业共识满足作业要求,最大的升沉运动分别是4.56、2.99和0.70 m。1000年一遇、100年一遇和1年一遇的最大筋腱顶部转角为11.57°、9.46°和 4.85°,满足作业要求。水平位移数值分析时历曲线见图7。
3.2 筋腱张力分析结果
筋腱最大张力主要受筋腱预张力和环境条件影响,可以作为筋腱设计和安装参考,目标平台筋腱最大张力为49 720 kN。发生在100年一遇海况一根筋腱移除的工况下。筋腱顶部最大张力规范没有特殊要求,一般来说,要满足强度设计要求。筋腱底部最小张力一般为正值,避免筋腱与桩基础脱离,目标平台最小筋腱张力为3 800 kN。筋腱张力数值分析结果见图8。
3.3 气隙预报结果
张力腿平台气隙与常规半潜平台不同,气隙规范要求如下[7]。
1)100年一遇的海况环境下最小气隙要大于1.5 m。
2)1 000年一遇的海况环境下最小气隙要大于0 m。
100年一遇的环境海况下最小气隙为2.68 m,1 000年一遇的环境海况下最小气隙为0.24 m。目标平台气隙满足设计要求。某点气隙数值预报结果见图9。
4 结论
1)目标平台在南海500 m水深恶劣海洋环
境条件下,平台总体运动性能良好。
2)南海环境恶劣,筋腱尺寸设计直径较大,同时需要的筋腱预张力较高。筋腱预张力越大,平台水平运动越小,筋腱底部张力出现负值的可能性越小,但是对筋腱强度和疲劳不利,因此筋腱预张力设计时需要综合平衡考虑。
3)张力腿平台的吃水较深,同时南海的流速相对较高,同时还有内波影响,流载荷对平台运动具有较大影响。
4)由于数值分析的局限性,数值分析结果需要模型试验修正,其中高频响应建议直接采用模型试验结果。
5)平台气隙采用时域耦合分析方法,在生存条件下最小气隙为0.24 m,有足够的气隙空间。
6)分析未考虑张力腿平台涡激运动和立管的涡激振动,其影响有待研究。
猜你喜欢
上海大中型电机(2021年1期)2021-06-09 09:12:04
中国海上油气(2021年2期)2021-06-09 08:13:48
防爆电机(2020年4期)2020-12-14 03:11:08
防爆电机(2020年3期)2020-11-06 09:07:30
航空发动机(2020年3期)2020-07-24 09:03:26
海洋工程装备与技术(2020年2期)2020-07-13 07:08:18
天津大学学报(自然科学与工程技术版)(2019年1期)2019-12-21 09:03:36
西南交通大学学报(2016年6期)2016-05-04 04:13:03
采矿与岩层控制工程学报(2015年3期)2015-12-16 19:20:42
浙江大学学报(工学版)(2015年7期)2015-03-01 01:18:55
