基于正交矩阵与联合独立滤波机制的无线传感网络信号定位算法∗
2018-10-29 07:51米洪杨习贝
新疆大学学报(自然科学版)(中英文) 2018年3期
米洪,杨习贝
(1.南京交通职业技术学院电子信息工程学院,江苏南京211188;2.江苏科技大学计算机科学与工程学院,江苏镇江212003)
0 引言
城市火灾救援中,消防员常常碰到一些突发性的危险,因此,能够实时确定火场内消防员的位置显得非常重要.无线传感定位技术广泛用于各领域,通过某种技术方法实现火场内消防员节点坐标定位,成为一种具有创新意义的技术.由于火场定位环节中往往会受到无线信道中存在的各种噪声影响,定位精度一般无法满足现实的需求,且流程与运作的简便性欠佳.
为解决无线传感定位技术中遇到的上述问题,研究者们基于角度、节点定位等方式,提出了许多具有一定实践价值的解决方案,如Qin H H[1]等强调了鉴于时片归纳映射半径划定制度的方案,运用累加时延片的手段,把该时片映射成定位半径圆,有效的完成了对于操作节点的定位.然而,该方案必须逐步经过明确定位半径圆的模式实施方位追踪,在平台中节点十分密集的时候,该方案将无法完成有效收敛,同时应当对一切的节点实施追踪,最终使方案的实时性出现下降的现象.Jamal N A[2]等提出了基于频率矢量映射权重递归制度的平台定位方案,在所有时片期限内只对信号品质最佳的节点设定最大权重,完成背景噪音中节点信息的接取.但是,该方案未能全面考虑信道的复杂,因为噪音频率一般与一切节点都存在着相交特征,造成只要节点信息的能量不高时即被噪音所淹没,导致定位操作无法持久.
为此,本文提出了一类鉴于正交矩阵联合单一滤波制度的无线传感网信息定位方案:首先分析了当前WSN网络定位过程中采取半径扫描旋转定位的不足,构建了正交矩阵定位机制,有效的消除了当前定位过程中存在的难以解决的锐角-钝角定位误差;随后,采用联合独立滤波机制,对获取的相位角精度进行优化,有效降低了高复杂环境中通过瑞利噪音为主的繁琐噪音对信息定位的精度作用,从而提高了信号定位精度.最后,采用NS2对本文算法的定位性能进行测试.
1 WSN网络的半径扫描旋转定位信号接收与噪声干扰分析
1.1 半径扫描旋转定位结构的信号接收
考虑到无线传感网信号在定位前均需要进行正交调制,以便防止不同节点间出现严重的频率干扰现象[3],设获取到的任意节点的信号如下:

式(1)中,A(t)表示定位信号的能量波动幅度,fc为信源基准发射频率,φ(t)为信息相位.

图1 半径扫描旋转定位结构
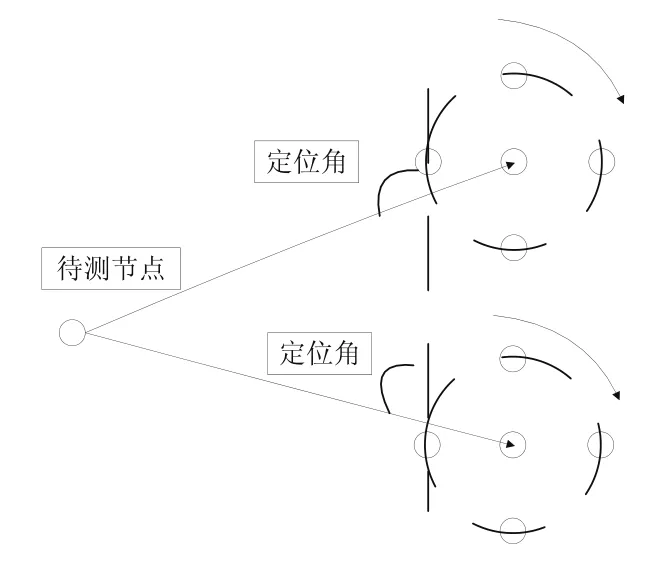
图2 定位角度误差
那么基准节点采纳到的无线信息Srecv(t)为:

其中,m表示半径扫描旋转定位结构中的接收节点的数目,ttime表示这些接收节点在启动-关闭过程中的时延.
由于式(2)所示的信号未考虑噪声的影响,可以从式(2)的最终接收信号中迅速获取初始发射信号.由于采用单纯的低通滤波方式难以将噪声干扰消除[4].且接收过程还存在难以解决的方位角判断问题,如图2所示,因此,本文将对半径扫描旋转定位结构进行改进,以便更好的适应实际使用环境.
1.2 信号接收过程中的噪声干扰因素分析
在火场中,接收信号将存在严重的干扰.设噪声部分为n(t),则最终接收的信号可以写成如下的形式:

考虑到信道噪声分布满足ψφα规律[5],则n(t)的噪声功率谱密度函数为:

其中,ψ表示相干系数.α表示信号独立系数.
2 本文WSN信号定位算法
依据火场信号接收及噪声干扰分析,本文算法首先对当前WSN网络定位算法的半径扫描旋转定位结构进行改进,构造了一种正交矩阵接收框架,避免了接收环节中的有关方位角误区,随后采纳联合单一滤波优化定位精度.算法如图3所示.
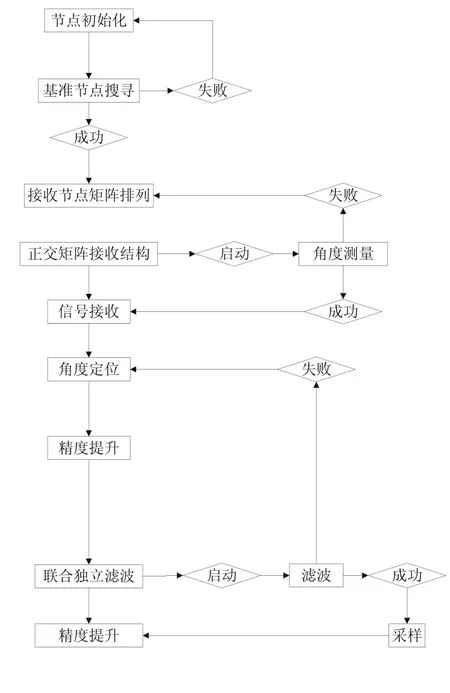
图3 本文算法流程图
2.1 基于正交矩阵接收结构的角度定位
传统的半径扫描旋转定位结构中考虑到出现的锐角-钝角判断困难均是由于旋转过程引起的角度误差,因此,本文采用图4所示的信号接收结构:基准节点外围的接收节点采用正交环的方式进行排列,正交环的数量可以根据需要不断增加,每个环上等间隔的部署若干个接收节点,每次定位时仅使用其中的一个接收节点,且接收节点-待定位节点距离与信号波长难以形成干涉[6],对于任意一个接收节点而言,接收到的定位信号Srecv(t,i)与式(2)相比,无需进行旋转处理:
本研究拟建立330 MW亚临界直接空冷发电机组整体效率和冷端损失的物理模型,基于空冷岛换热面积变化的因素分析,设计和优化空冷岛的结构和性能参数,降低运行背压,提高机组整体效率。

对单个接收节点而言,其相位信号ψ(t)满足:

设信号接收节点个数为i,则对任意待定位节点而言,在进行相位判断时,fc与φ(t)在进行相位统计平均过程中时均与θ无关,因此θ的估计量即是各个正交接收结构中接收节点获取相位角的统计平均估计,见图4,设接收节点个数为n,则其待测信号的相位ψ(t)满足:

其中θi为第i个接收节点所获取的待定位节点的角度,其估计量即为角度定位的精确程度.
通过θ的估计量的计算方式与式(6)的对比,可以精确的获取各个接收节点的相位估计θi,然后获取了对待定位节点角度方位的精确估计,与传统的半径扫描旋转定位结构相比,本文提出的正交矩阵接收结构能够有效的消除锐角-钝角的误差判断,且可以通过增加接收节点进一步提高定位角度的估计精度.
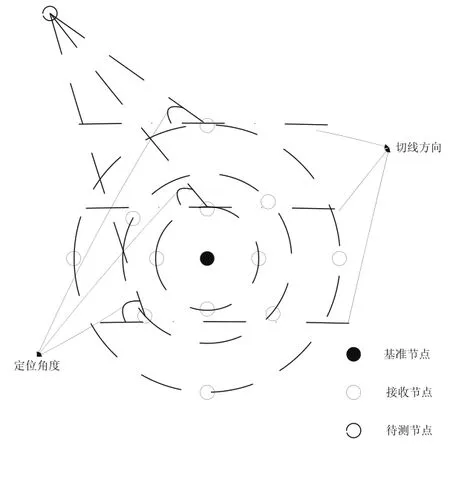
图4 正交矩阵接收结构示意图
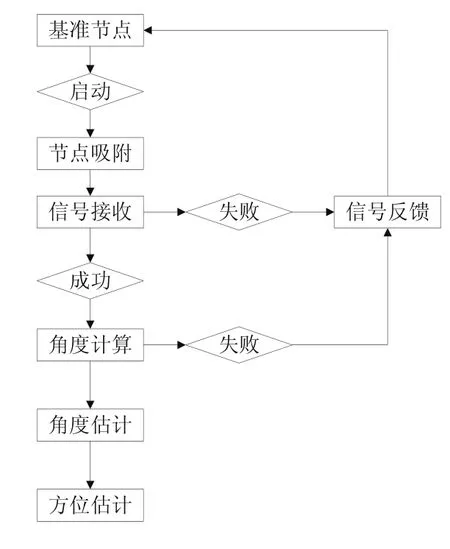
图5 正交矩阵接收过程流程图
2.2 基于联合独立滤波的定位角度估计精度优化
从式(6)、(7)可知,对于任意一个基准节点而言,均可以形成独立的正交矩阵接收结构,其处理流程如图5所示.因此,设整个网络中存在m个互相独立的基准节点,获取的精度估计由于在任意的时刻,通过获取的各个正交矩阵接收结构所对应的估计精度均会受到信道中存在的噪声影响,且满足式(4)的功率谱密度函数,对最终接收节点而言,该误差均由各个正交矩阵接收结构在接收过程中存在的诸如莱斯噪声、高斯白噪声等诸多因素构成,而据节1.1分析可知,噪声n(t)满足莱斯分布,且其功率谱密度函数为[7]:

而n(t)概率密度f(R)满足如下等式:

其中mr为n(t)的分布均值,σr为n(t)的标准差,I0为一阶贝塞尔函数.
设k=j时进行精度估计刚好达到最小值,则取得该最小值的可能性Pmin可以写为:

其中Rk表示n(t)在抽样时第k个观测过程中的获取值,设

将其代入式(9)进行积分可得:

其中fr1和fM分别表示n(t)和精度估计θ的概率密度函数,Frk表示噪音积累量的随机变量函数.
n(t)的精度设经过足够长时间后在各个独立正交矩阵接收结构上积累的最大值和最小值分别为Rmax和Rmin,则获取的最终估计精度pright可由下列模型计算得到:

其中mr为信号统计均值,σr为信号标准差,R为最终精度,exp为自然对数,y为Rmax的密度分布量,I0为一阶贝塞尔函数.
考虑到无线传感网的信号频率均处于1.0248GHz以上的级别[9],通过式(13)取得的有关方位角定位精度能实现10−9等级,而以往半径扫描运行定位框架及如时刻片相干定位方案的定位精度只能实现10−6等级.
3 仿真实验
为验证本文算法的有效性,本文仿真实验与联合积分悬定方案[10](JISA方案)、非线性有关定位相干精度飙升方案[11](NP-CPLA方案)作为参考组,同时通过NS2仿真[12]系统做出测试,以便证实本文算法的合理性,其中平台信号指标见表1.
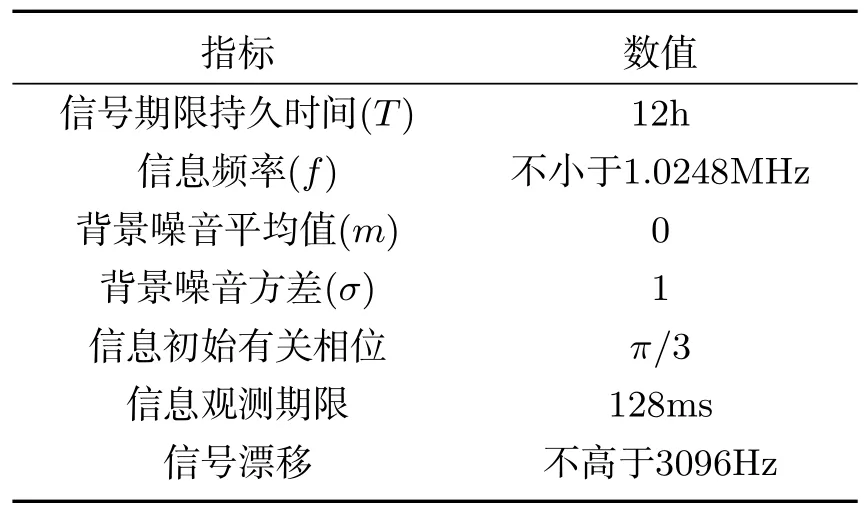
表1 仿真指标表

图6 联合独立滤波示意图
3.1 定位精度对比
由于JISA算法与NP-CPLA算法均采用半径扫描旋转定位结构,因而在定位精度对比上,将采取控制接收节点数目的结构与本文算法所采用的正交矩阵接收结构进行对比.图7(a)~(c)反映了在相异噪音干扰环境下(高斯噪音、以及瑞利噪音与莱斯噪音),三种方案的定位精度检测成果.本篇算法在相异的噪音干扰环境下,定位精度都明显超越对JISA方案、以及NP-CPLA方案,特别在瑞利噪音高干扰环境下,本文方案最高能超过JISA算法1个数量级,超过NP-CPLA算法2个数量级左右,且伴随着采纳节点总数的提升,本篇方案的定位精度一直要超越参考组方案,同时变化幅度不大.

图7 三种噪声干扰下的各方案的定位精度检测
3.2 各方案的定位效率检测
为测试本文算法以及JISA方案、NP-CPLA方案在同等定位精度下的定位效果,优先在低退化信道、以及一般退化信道、高退化环境下实施仿真.定位精度的有关阈值都设定为实现10−6等级,背景噪音都设定为现实中频繁遇到的瑞利噪音.图8(a)~(c)显示了本文算法与JISA算法、NP-CPLA方案伴随着采纳节点个数逐步提升时的定位时限检测结果.由图可见,随着采纳节点个数的逐步提升,本文算法以及JISA方案、NP-CPLA方案都存在着定位时限延长的问题.但是,本文检测方法定位时耗增加幅度较为平缓,而JISA算法、NP-CPLA方案的定位时限都显现一定的变化特点.

图8 三种信道条件下的各算法的定位时耗测试结果
3.3 信息定位预测精度检测(平台信道噪音为瑞利噪音)
为证实本文算法以及JISA方案、NP-CPLA方案在信息定位预测精度的区别,设定了以下仿真指标,如表2所示.

表2 仿真指标表
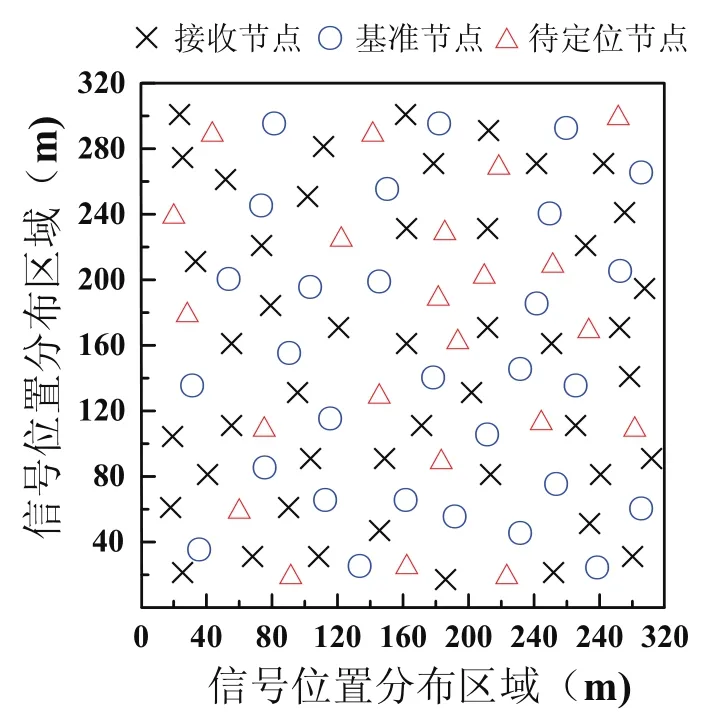
图9 实际WSN网络节点信号位置分布
图9表示现实节点分布情况,图10(a)~(c)优先反映了本文算法、JISA方案及NP-CPLA方案的信息定位预测现状.从图10(a)中发现,本文算法所获得信息定位的方位和图7所描述的待定位节点的现实方位吻合度极佳,其定位的有关精度误差一般不大于0.9m,而图10(b)中JISA算法定位精度误差最大达到了4.6m,图10(c)的NP-CPLA方案定位精度误差一般达到了10.7m.本文算法采取正交矩阵定位机制,能够在避免锐角-钝角误差判断的同时,不断对定位坐标进行精度提升.

图10 三种算法的信号定位精度仿真测试
3.4 信号定位均方根误差测试
为验证本文算法与JISA算法、NP-CPLA算法的信号定位均方根误差[9],设:其噪声信号为瑞利噪声,噪声均值与方差均满足表1;信噪比强度在0dB-50dB内,以5dB的步长逐渐增加;并以1000次仿真结果进行信号定位均方根误区测试,优先在高退化信道、以及中退化信道、一般退化信道环境下,实施仿真测试.
图11(a)~(c)分别显示了三种算法在高衰落信道、中衰落信道、普通衰落信道条件下,三种算法在信号定位均方根误差(RMSE)上的对比.由图可知,随着信噪比强度的不断增加,三种方案的信息定位均方根误区都反映出一定层面的缩减,然而本文算法在三种信道条件下(高衰落信道、中衰落信道、普通衰落信道),均方根误差均要显著的低于JISA算法和NP-CPLA算法,这是由于本文算法采用正交矩阵接收结构,当节点受到瑞利噪声干扰时,基准节点可通过切线-法线定位方式进行锐角-钝角误差判断,有效的降低了误判现象.综上所述,本文算法在信号定位均方根误差指标上具有显著的优势.

图11 三种算法的信号定位均方根误差测试
4 结束语
为解决火场内消防员的无线传感网信号定位算法存在严重定位干扰,且难以适应瑞利信道等高复杂环境以及精度飙升不易等缺陷,本文提出了基于正交矩阵联合单一滤波制度的无线传感网信息定位方案.通过构建正交矩阵接收结构,解决了传统的半径扫描旋转定位结构中存在难以消除锐角-钝角误差的不足;建立构建联合独立滤波机制,提高了本文算法在不同衰落信道条件下对各种信道噪声的抗干扰能力,改进了定位精度,减少了相同精度下的定位时间.仿真实验表明,与JISA算法及NP-CPLA算法相比,本文算法具有更高的定位精度与更小的定位误差.
猜你喜欢
火控雷达技术(2021年2期)2021-07-21
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
劳动保护(2019年3期)2019-05-16
制造技术与机床(2018年10期)2018-10-13
北京航空航天大学学报(2017年3期)2017-11-23
雷达学报(2017年1期)2017-05-17
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
噪声与振动控制(2015年4期)2015-01-01
航天返回与遥感(2014年5期)2014-07-31